

Загальна будова стабілізатора:
Стабілізатор озброєння 2Э36-1 складається з таких частин:
- гіротахометри: приводу вертикального наведення ГТ-ВН; приводу горизонтального на ведення ГТ-ГН; компенсаційного приводу вертикального наведення ГТ-К;
- тахометр ТГ;
- пульти керування командира ПУ-К і оператора ПУ-0;
- блок керування БК;
- підсилювачі потужності і приводу вертикального наведення П-ВН, приводу -горизонтального наведення П-ГН;
- виконуючі двигуни горизонтального наведення ЕДМ-20 і вертикального наведення
ЕДМ-14
- прилад цілевказування ЦУ;
- перетворювач струму ПТ-200Ц-Ш;
- фільтр живлення ФЖ;
- кінцеві вимикачі: обмеження підвищення, обмеження пониження, кута підвищення 35°, стопора гармати, стопора башти, люків механіка-водія і десанту.
Крім того до складу стабілізатора входить комплект монтажних кабелів, одиночний комплект ЗИП.
Принцип дії стабілізатора:
При русі БМП по пересічній місцевості корпус може виконувати три види лінійних і три види кутових переміщень вздовж і навкруги осей X, У, Z.
Лінійні і кутові переміщення корпусу БМП
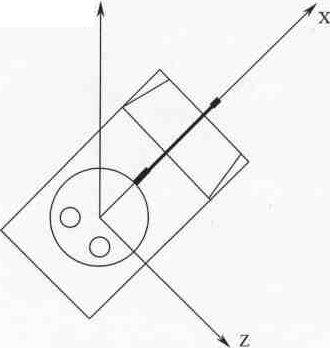
Лінійні переміщення мало впливають на влучність стрільби. Кутові переміщення прийнято називати:
- коливання навкруги поперечної осі Z - галопировання;
- коливання навкруги вертикальної осі У — рискання;
- коливання навкруги продольної осі X - потаптування.
Галопування і рискання помітно впливає на точність стрільби тому завдання стабілізатора полягає в тому, щоб зменшити їх вплив.
При галопуванні башта разом з корпусом відхиляється від вихідного положення і затягує за собою гармату за рахунок сил тертя в цапфах.
Знизу на гарматі закріплений ГТ-ВН, який виробляє електричний сигнал по амплітуді пропорційний кутовій швидкості відхилення гармати від стабілізованого положення, а по фазі відповідній направленню відхилення гармати у вертикальній площині. Сигнал поступає на вхід інтегратора, який формує сигнал, пропорційний куту відхилення гармати від стабілізованого положення, тобто інтегралу від кутової швидкості і подає його на вхід сумуючого підсилювача.
Для підвищення якості стабілізації (точності і демпфування) на вхід сумуючого підсилювача подається сигнал, пропорційний кутовій швидкості гармати у вертикальній площині, який отримуємо зсувом сигналів з ГТ-К і ТГ.
ГТ-К закріплений на башті і виробляє сигнал, пропорційний кутовій швидкості башти у вертикальній площині.
ТГ встановлений на осі цапф гармати і виробляє сигнал, пропорційний швидкості повороту гармати відносно башти. Сума двох цих сигналів пропорційна кутовій швидкості гармати у вертикальній площині.
Сумований сигнал (інтегратора ГТ-К, ТГ) підсилюється по напрузі і подається на широтно-імпульсний модулятор у вигляді сталої напруги, пропорційної куту відхилення гармати і її кутової швидкості додатньої або від'ємної полярності. Широтно-імпульсний модулятор перетворює його в імпульсний сигнал частотою 400 Гц з шириною імпульсу, яка пропорційна величині напруги на вході (керуючого сигналу).
Імпульсний сигнал з широтно-імпульсного модулятора підсилюється в підсилювачі потужності до потужності, що забезпечує роботу виконуючого двигуна. Середній струм, що протікає через його якірну обмотку, пропорційний до величини керуючого сигналу.
Через редуктор підйомного механізму виконуючий двигун повертає гармату у початкове положення. При цьому напрямок обертання ротора залежить від напрямку струму, який тече через якірну обмотку, що в свою чергу визначається полярністю керуючого сигналу який поступає на модулятор.
Для підвищення якості перехідних процесів використовується сигнал зворотної додаткової смуги зв'язку по струму якоря електродвигуна, який створюється датчиком струму. Сигнал з нього через ланцюг корекції поступає на сумуючий підсилювач блоку керування, де сумується з сигналом інтегратора.
Наведення стабілізованих гармат і кулемета у вертикальній площині відбувається обертанням рукояток пульта керування на себе (догори) або від себе (донизу). При відхиленні рукояток пультів керування електричний сигнал у вигляді сталої напруги, пропорційної куту відхилення рукояток подається на вхід сумуючого інтегратора і сумується з сигналом ГТ-ВН. З виходу інтегратора сигнал, пропорційно інтегралу добутку сигналів з пультів керування і ГТ-ВН, подається на сумуючий підсилювач, де сумується з сигналом ГТ-К, ТГ і датчика струму, і далі після підсилювання і перетворення подається на виконуючий двигун. Останній через редуктор підйомного механізму піднімає (опускає) гармату з швидкістю, пропорційною куту відхилення рукояток пульта керування і в напрямі, згідно зі знаком сигналу з пульта керування.