

Исследовательская часть
Исследуем, как будут меняться функции
v, y, x,
![]() в зависимости от подстановки в уравнения
движения неуправляемого летательного
аппарата в проекциях на касательную и
нормаль к траектории значений коэффициента
свободного падения с разной точностью
задания (см. табл. 6, 7).
в зависимости от подстановки в уравнения
движения неуправляемого летательного
аппарата в проекциях на касательную и
нормаль к траектории значений коэффициента
свободного падения с разной точностью
задания (см. табл. 6, 7).
Таблица 6: Расчёт активного участка
|
Скорость vа, |
Угол
θа |
Высота
yа, м |
Дальность
xа, м |
Время
tа, с |
Коэф. своб. падения g |
Метод Рунге-Кутта |
432.42 |
0.574 |
552.47 |
789.37 |
4 |
9.81 |
432.10 |
0.569 |
549.17 |
790.83 |
4 |
10 |
|
Метод Эйлера |
448 |
0.575 |
565.39 |
807.67 |
4 |
9.81 |
447.09 |
0.570 |
561.19 |
808.16 |
4 |
10 |
Таблица 7: Расчёт пассивного участка
|
Скорость vп, |
Угол
θп |
Высота
yп, м |
Дальность
xп, м |
Время
tп, с |
Коэф. своб. падения g |
Метод Рунге-Кутта |
237.377 |
-0.906 |
0 |
10426.327 |
46,488 |
9.81 |
238.600 |
-0.900 |
0 |
10288.818 |
45.558 |
10 |
|
Метод Эйлера |
240.461 |
-0.914 |
0 |
10884.580 |
47.618 |
9.81 |
241.703 |
-0.908 |
0 |
10744.871 |
46.668 |
10 |
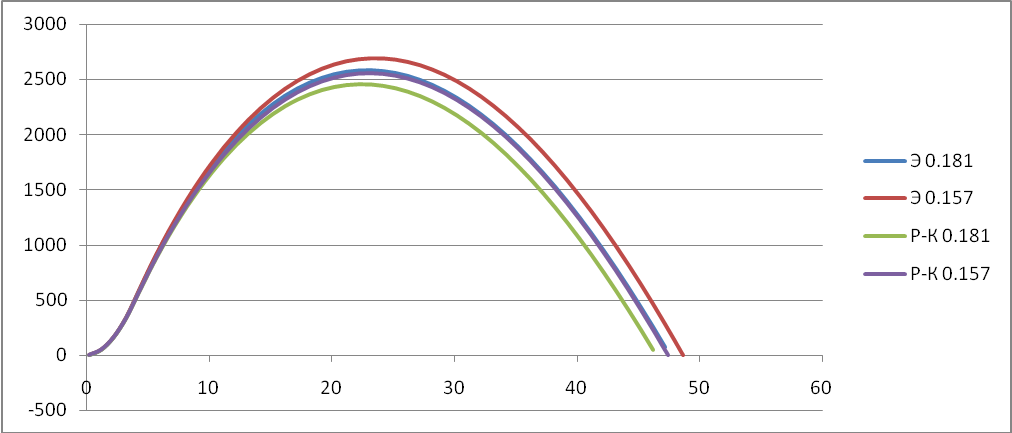
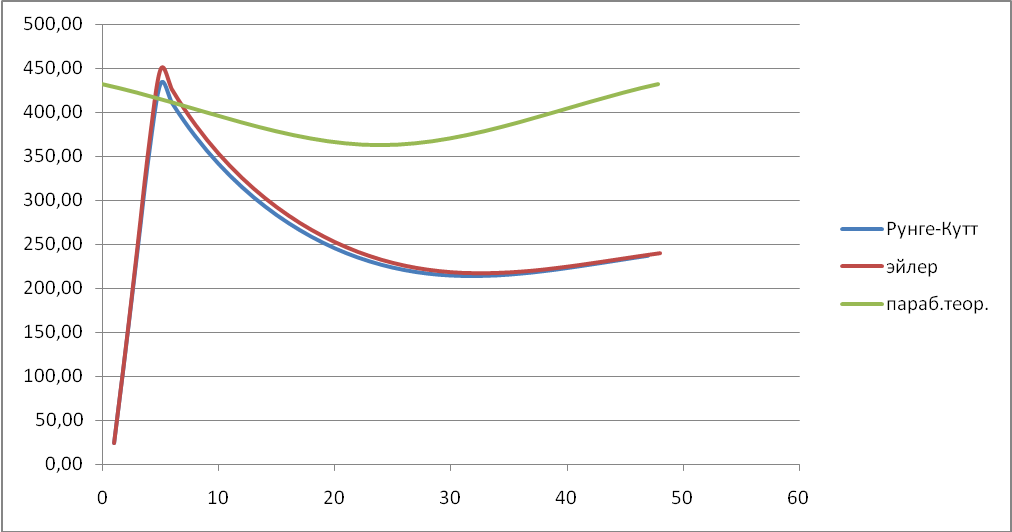
Из таблиц 6 и 7 видно, что изменение величины коэффициента свободного падения g в пределах (9.81 - 10)м/с существенным образом не оказывает влияние на функции v, y, . Изменение коэффициента свободного падения g более существенно влияет только на дальность x.
Исследуем точность метода Рунге-Кутта
и метода Эйлера на примере дальности
неуправляемого ЛА xп. Точность в
этих методах определяется заданием
шага интегрирования![]()
![]() .
Будем
последовательно делить на 2, если точность
велика, и
последовательно умножать на 2, в случае,
если точность удовлетворяет (см.табл.8).
.
Будем
последовательно делить на 2, если точность
велика, и
последовательно умножать на 2, в случае,
если точность удовлетворяет (см.табл.8).
Таблица 8
|
|
Дальность xп, м |
Метод Рунге-Кутта |
|
10452.093 |
=0.01 |
10426.327 |
|
|
10426.866 |
|
Метод Эйлера |
=0.02 |
10573.747 |
=0.01 |
10884.580 |
|
|
10885.449 |
8 видно, что шаг =0.01 выбран верно, т.к. при изменение значения дальности полёта неуправляемого ЛА незначительно, а при =0.10 изменение дальности полёта уже существенно.
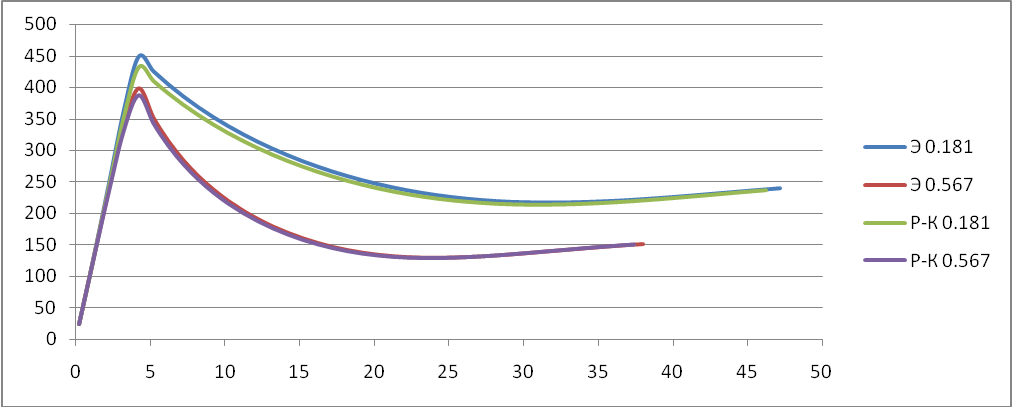
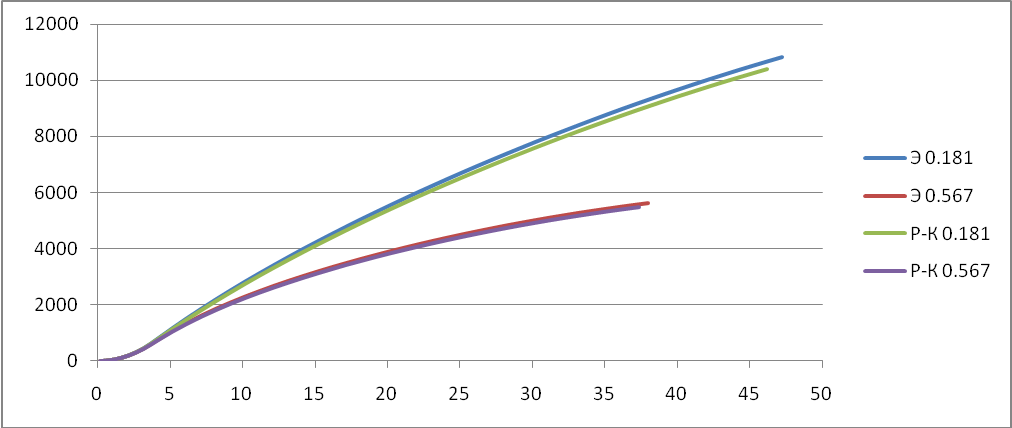
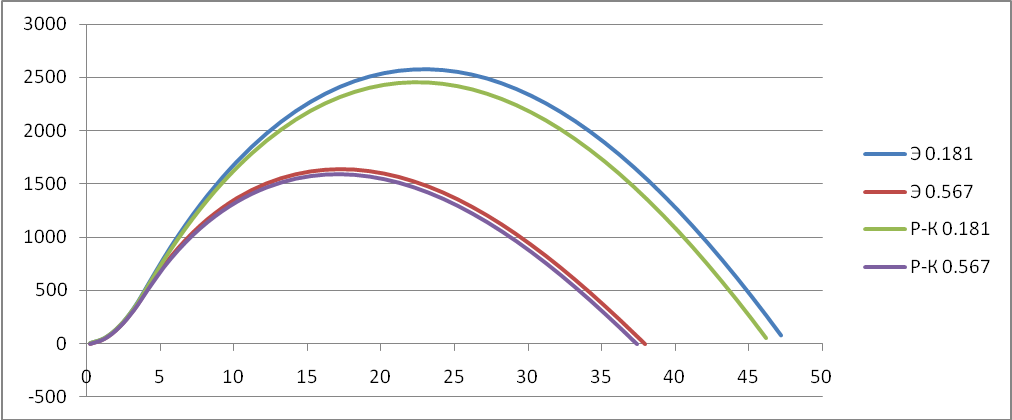
Исследуем поведение функции v, y, x, в зависимости от времени t при постоянном коэффициенте лобового сопротивления Cx. В качестве значений Cx возьмём: 0.157; 0.181; 0.567.
V(t):
Cx=0.157
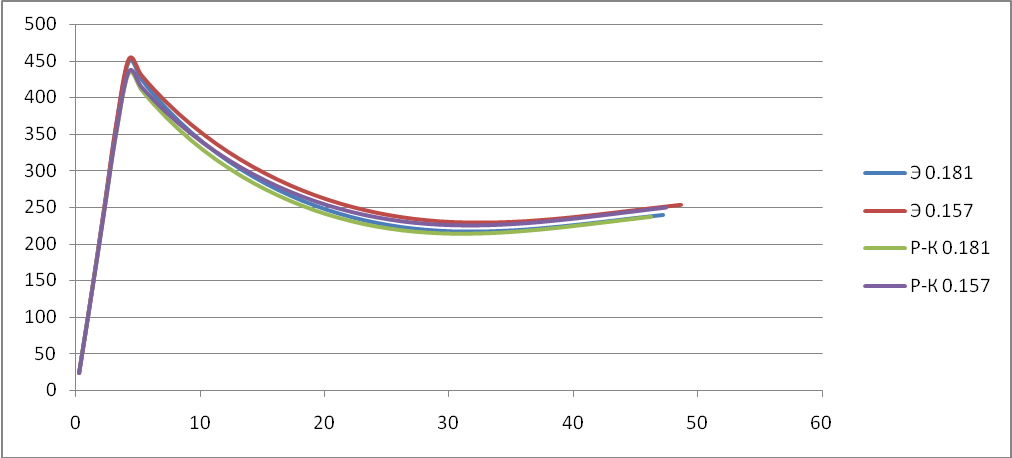
Сх=0.567
Q(t)
Cx=0.157

Сх=0.567

X(t):
Cx=0.157
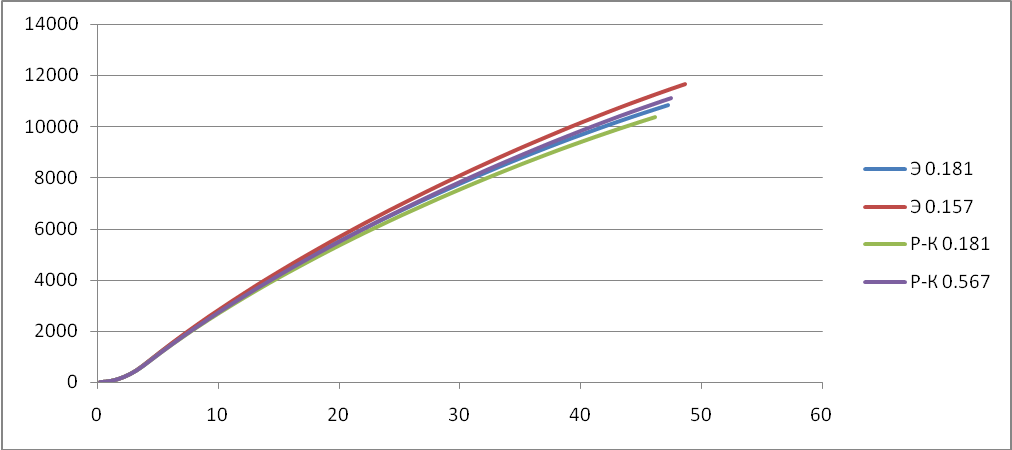
Сх=0.567
Y(t):
Cx=0.157
Сх=0.567
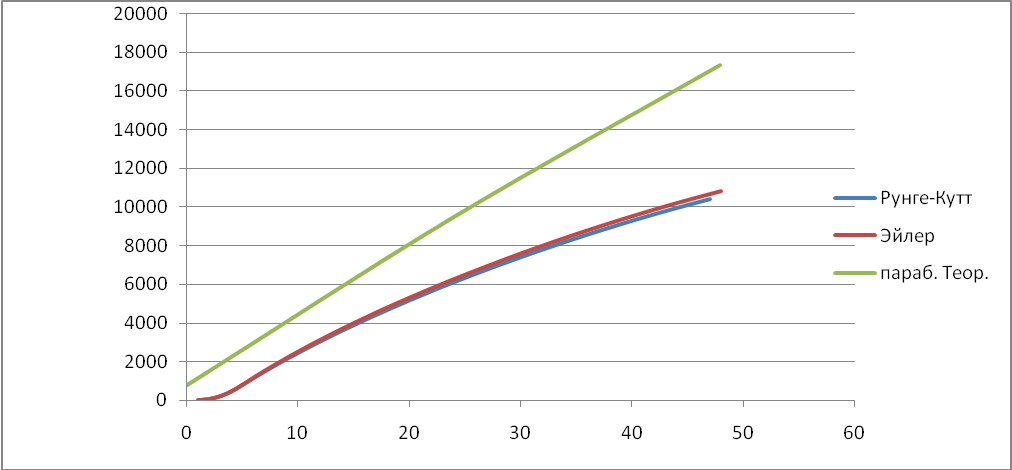
Приложение
Траектория неуправляемого летательного аппарата
Зависимость y(t)
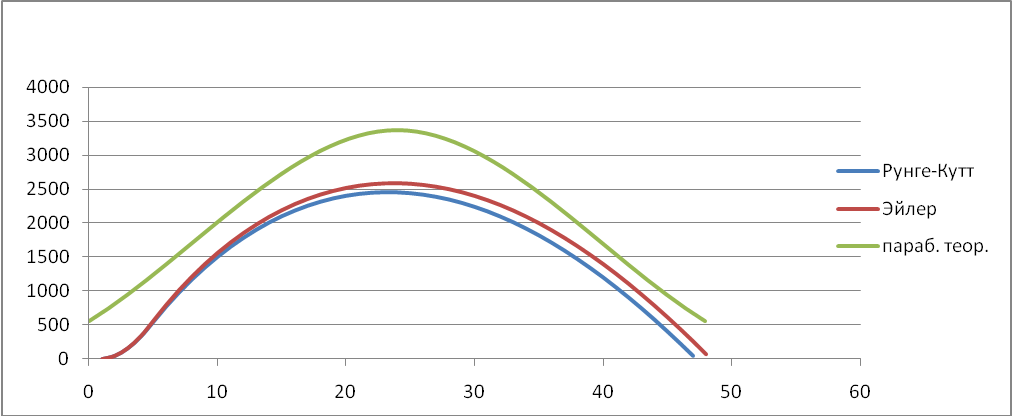
Зависимость x(t)
Зависимость v(t)
Зависимость угла
![]()

Зависимость y(x)

Программа расчета методом Рунге Кутта:
#include<stdio.h>
#include<math.h>
#include<conio.h>
#include<iostream.h>
#include<stdlib.h>
#include<dos.h>
main()
{
FILE *fin;
float t0,v0,y0,x0,dt,cx,i,ay1,ay2,ay3,ay4,r,ay11,ay22,ay33,ay44,
by1,by2,by3,by4,by11,by22,by33,by44,cy1,cy2,cy3,cy4,cy11,cy22,cy33,cy44,
dy1,dy2,dy3,dy4,dy11,dy22,dy33,dy44,q,q0,m,y111,y222,y333,s,y1,y2,y3,y4,w,w1,w2;
int k=1;
clrscr();
printf("PROGRAMMA RASCHOTA RUNGI-KUTT\n");
printf("Vvedite dt=");
scanf("%f",&dt);
printf("Vvedite t0=");
scanf("%f",&t0);
printf("Vvedite v0=");
scanf("%f",&v0);
printf("Vvedite y0=");
scanf("%f",&y0);
printf("Vvedite x0=");
scanf("%f",&x0);
printf("Vvedite cx=");
scanf("%f",&cx);
printf("Vvedite i=");
scanf("%f",&i);
printf("Vvedite q0=");
scanf("%f",&q0);
printf("Vvedite q=");
scanf("%f",&q);
printf("vvedite r=");
scanf("%f",&r);
printf("Vvedite s=");
scanf("%f",&s);
printf("Vvedite m=");
scanf("%f",&m);
printf("CHTOBU NACHAT RASCHOT NAGMITE 'ENTER'\n");
getch();
fin=fopen("RUNGIKUTT.txt","w+");
q0=((M_PI)*q0)/180;
w=m-q*t0; w1=m-q*(t0+dt);w2=m-q*(t0+(dt/2));
do{
if(t0>=2) w=w1=w2=m-q*2;
ay1=(r/w)-(0.5*i*cx*1.24*exp((-y0)/7800)*s*pow(v0,2))/w-9.81*sin(q0);
ay2=(-9.81*cos(q0))/v0;
ay3=v0*sin(q0);
w=m-q*(t0+dt);
by11=v0+ay1*(dt/2);
by22=q0+ay2*(dt/2);
by33=y0+ay3*(dt/2);
by1=(r/w2)-(0.5*i*cx*1.24*exp((-by33)/7800)*s*pow(by11,2)/w2)-9.81*sin(by22);
by2=(-9.81*cos(by22))/by11;
by3=by11*sin(by22);
cy11=v0+by1*(dt/2);
cy22=q0+by2*(dt/2);
cy33=y0+by3*(dt/2);
cy1=(r/w2)-((0.5*i*cx*1.24*exp((-cy33)/7800)*s*pow(cy11,2))/w2)-9.81*sin(cy22);
cy2=(-9.81*cos(cy22))/cy11;
cy3=cy11*sin(cy22);
w2=w2-q*(dt/2);
dy11=v0+cy1*(dt/2);
dy22=q0+cy2*(dt/2);
dy33=y0+cy3*(dt/2);
dy1=(r/w1)-(0.5*i*cx*1.24*exp((-dy33)/7800)*s*pow(dy11,2))/w1-9.81*sin(dy22);
dy2=(-9.81*cos(dy22))/dy11;
dy3=dy11*sin(dy22);
w1=w1-q*dt;
y111=(dt/6)*(ay1+2*(by1+cy1)+dy1);
y222=(dt/6)*(ay2+2*(by2+cy2)+dy2);
y333=(dt/6)*(ay3+2*(by3+cy3)+dy3);
y1=v0+y111;
y2=q0+y222;
y3=y0+y333;
y4=x0+(y333/tan(y2));
printf("v=%f\t",y1); printf("q=%f\t",y2); printf("x=%f\t",y4); printf("y=%f\t",y3);
if(k==1 || k%100==0)
{
fprintf(fin,"%f\t ",y1); fprintf(fin,"%f\t ",y2); fprintf(fin,"%f\t ",y4); fprintf(fin,"%f\t ",y3);
printf(fin,"%f\n ",t0);
}
t0=t0+dt;
if(t0>4)r=0;
v0=y1;
y0=y3;
x0=y4;
q0=y2;
if(t0<=4){ w=m-q*(t0+(dt/2)); w1=m-q*(t0+dt); }
if(t0>4)w1=w=m-q*4;
k++;
if(k==10000) break;
}
while(y3>0);
printf("\n");
printf("RASCHT ZAKONCHEN NAGMITE 'ENTER', FILE RUNGIKUTT.txt");
fclose(fin); getch(); return 0;
}