

2.3. Определение Tм, Tя и провала скорости при набросе нагрузки
При работе на естественной механической характеристике в переходных процессах уравнение динамической механической характеристики асинхронного двигателя аналогично двигателю независимого возбуждения:

4ТЯ >ТМ, следовательно процесс колебательный.
Построим графики переходных процессов сброса и наброса нагрузки с помощью программной среды MatLab. График зависимостей ω(t) и M(t) представлен на рис. 47 и рис. 48. Динамическая механическая характеристика для наброса – сброса нагрузки представлена на рис. 49.
Для получения апериодического переходного процесса необходимо увеличить момент инерции двигателя в 100 раз. Тогда:

4ТЯ <ТМ, следовательно процесс апериодический.
Построим графики переходных процессов сброса и наброса нагрузки с помощью программной среды MatLab. График зависимостей ω(t) и M(t) представлен на рис. 50. Динамическая механическая характеристика для наброса – сброса нагрузки представлена на рис. 51.

Рис. 47. Зависимости ω(t) и M(t) при набросе нагрузки (колебательный п. п.)

Рис. 48. Зависимости ω(t) и M(t) при сбросе нагрузки (колебательный п. п.)

Рис. 49. Динамическая электромеханическая характеристика при сбросе - набросе нагрузки (колебательный п. п.)
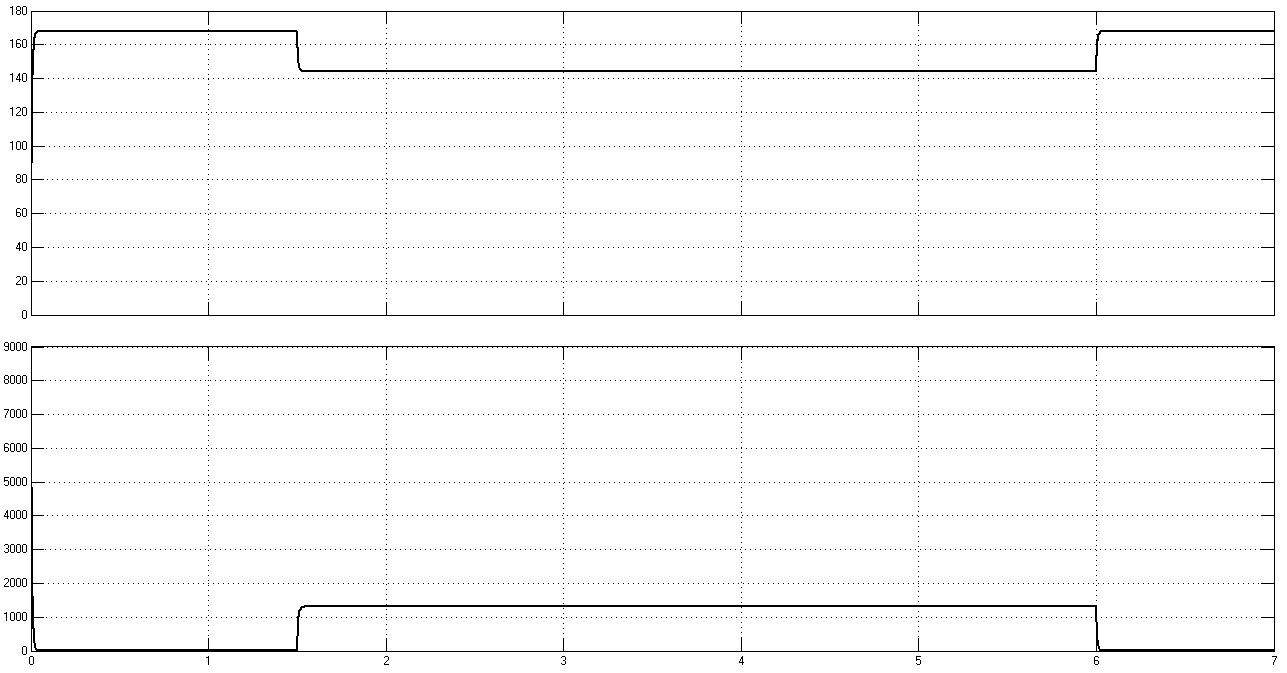
Рис. 50. Зависимости ω(t) и M(t) при набросе нагрузки (апериодический п. п.)

Рис. 51. Динамическая электромеханическая характеристика при сбросе - набросе нагрузки (апериодический п. п.)
2.4. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРИ ЧАСТОТНОМ РЕГУЛ РЕ РЕГУЛИРОВАНИИ С P=const В ДИАПАЗОНЕ 3:1
Для
частотного регулирования с постоянной
мощностью при частотах ниже номинальной
для обеспечения постоянной перегрузочной
способности необходим закон регулирования
 .
При регулировании частоты выше номинальной
данный закон невыполняется из-за
невозможности двигателя работать при
повышенном напряжении. При данном
регулировании меняется только частота
и перегрузочная способность двигателя
уменьшается.
.
При регулировании частоты выше номинальной
данный закон невыполняется из-за
невозможности двигателя работать при
повышенном напряжении. При данном
регулировании меняется только частота
и перегрузочная способность двигателя
уменьшается.
Построение механических характеристик для повышенных частот ведется по формулам:
Для обеспечения постоянной мощности подбираются значения статического момента.
 ,
(89)
,
(89)
 ;
(90)
;
(90)
Данные характеристики и требуемый для обеспечения постоянной мощности закон изменения статического момента представлены на рис.52

Рис. 52. Характеристики частотного регулирования
2.5. ПОСТРОЕНИЕ ГРАНИЧНЫХ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ПРИ ЧАСТОТНОМ РЕГУЛИРОВАНИИ С M=const В ДИАПАЗОНЕ 10:1
Приближенный закон регулирования напряжения при изменении частоты вытекает из формулы критического момента:

Т.к. при значительном уменьшении частоты величина хк соизмерима с сопротивлением статора, то попытка пренебречь данным сопротивлением приводит к ошибке.
Закон изменения напряжения при котором

получен
решением данного уравнения относительно
напряжения для ряда значений частоты
и представлен в сравнении с законом
 .
.
Выбирая соответствующие напряжения, следуя данному закону, строим механические характеристики для f=fном ; f=0.1fном по формулам:
 ,
(91)
,
(91)
; (92)
Данные характеристики представлены на рис. 53.

Рис. 53. Характеристики частотного регулирования
2.6. ПЕРЕХОДНЫЙ ПРОЦЕСС ПРИ ПЕРЕХОДЕ С МИНИМАЛЬНОЙ СКО РОСКОРОСТИ НА МАКСИМАЛЬНУЮ
Момент статический:
 .
.
Скорость двигателя на исходной характеристике при f=5 Гц:
 .
.
Момент инерции:
 .
.
Скорость на естественной характеристике соответствующая заданному статическому моменту:
 .
.
На основании приближенного решения основного уравнения движения в конечных приращениях и статических характеристик произведем расчет по следующим формулам:
 .
.
Переходные процессы представлены рис. 54.

Рис. 54. Переходные процессы
2.7 ХАРАКТЕРИСТИКА ЭДТ ПРИ ОБЕСПЕЧЕНИИ ЗАДАННОЙ ТОЧКИ
Характеристика
должна проходить через точку
 .
.
Для определения параметров необходимой характеристики воспользуемся универсальными характеристиками, представленными на рис. 55.

Рис.55.Универсальные механические характеристики динамического торможения для асинхронных двигателей с фазным ротором типа МТ.
Характеристика выбирается по следующему условию:
 (93)
(93)
Где:
 (94)
(94)
Выбрана
характеристика с

Значение тока холостого статора определим из формулы:
 (95)
(95)
Где:
 (96)
(96)
Для обеспечения прохождения характеристики через заданную точку необходимо увеличить сопротивление в цепи ротора в 1,1 раз
Добавочное сопротивление в цепи ротора, обеспечивающее работу в заданной точке:
 (97)
(97)
График ЭДТ представлен на рис. 56.
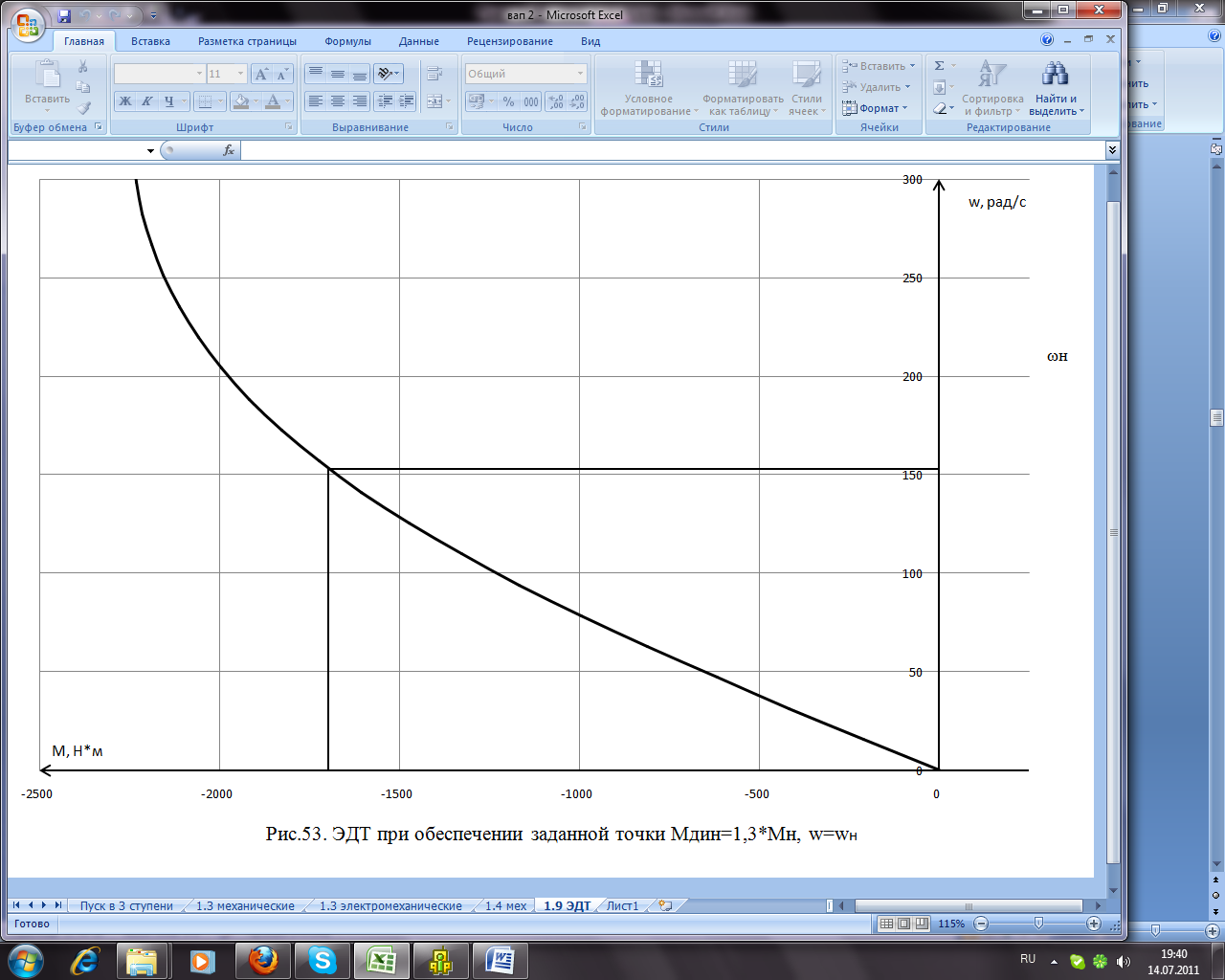
Рис.56. График ЭДТ при обеспечении точки
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Теличко Л.Я Методические указания к курсовому проекту по м дисциплине «Теория электропривода». Липецк: ЛГТУ, 2001. 20с.
Москаленко В.В. Электрический привод - М.:Высшая школа, 1991. 430 с.
Вешеневский С.Н. Характеристики двигателей в электроприводе. М.: Энергия, 1977. 432с.
Чиликин М.Г., Ключев В.И. Сандлер А.С Теория автоматизированного электропривода. М.: Энергия, 1979. 616с.
5.Ключев В.И., Терехов В.М. Электропривод и автоматизация общепромышленных механизмов. М.: Энергия, 1980. 360с.