

1.8. Сброс и наброс нагрузки
Построение переходных процессов =f(t) и I=f(t) с учетом индуктивности якоря при набросе нагрузки с Mc1 = 0 до Mc2 = Мн и при сбросе с Mc2 = Мн до Mc1 = 0 для реальных параметров выбранного двигателя.
Наброс нагрузки с Mc1 = 0 до Mc2 = Мн

4ТЯ <ТМ , следовательно процесс апериодический.



Для получения колебательного процесса увеличим индуктивность якоря в 10 раз.

4ТЯ >ТМ , следовательно процесс колебательный.


Сброс нагрузки с Mc2 = Мн до Mc1 = 0

Зависимости , M(t) и I(t) представлены на рис. 16, рис. 17 и рис. 19. Динамические механические характеристики представлены на рис. 18 и рис. 20.
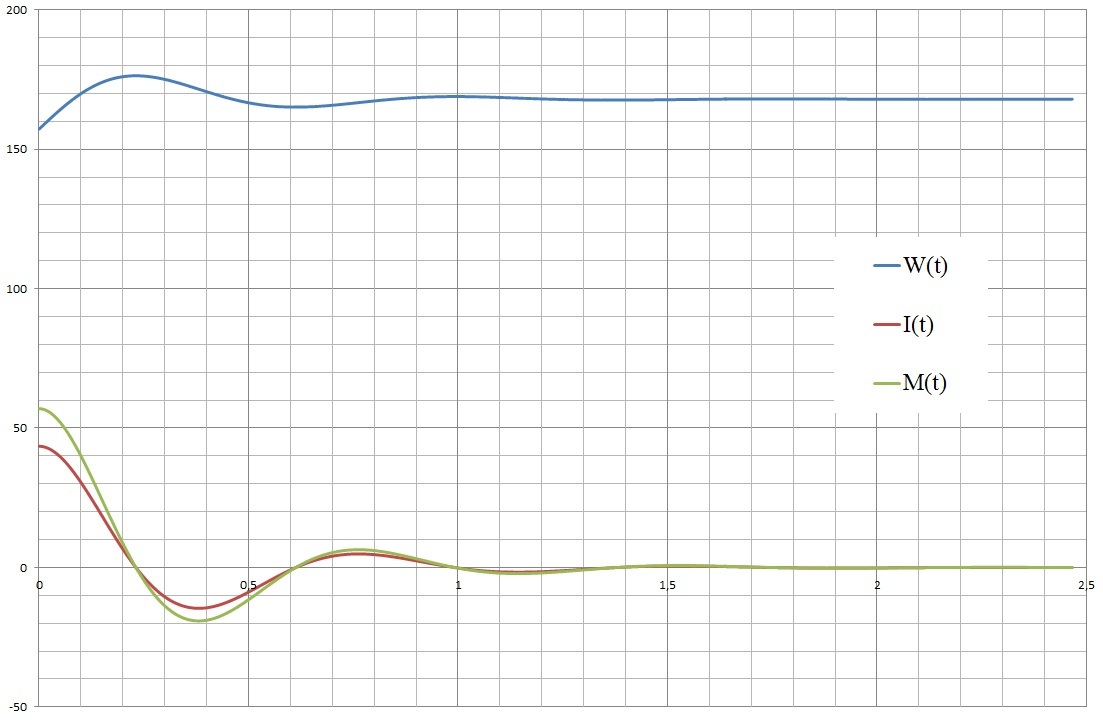
Рис. 16. Зависимости , M(t) и I(t) при сбросе нагрузки (колебательный процесс)

Рис. 17. Зависимости , M(t) и I(t) при набросе нагрузки (колебательный процесс)

Рис. 18. Динамическая механическая характеристика при набросе – сбросе нагрузки (колебательный процесс)

Рис. 19. Зависимости , M(t) и I(t) при набросе – сбросе нагрузки (апериодический процесс)

Рис. 20. Динамическая механическая характеристика при набросе – сбросе нагрузки (апериодический процесс)
1.9. СТРУКТУРНАЯ СХЕМА ДВУХМАССОВОЙ ЭМС МЕХАНИЗМА
ПЕРЕДВИЖЕНИЯ ТЕЛЕЖКИ

Рис. 21. Структурная схема двухмассовой ЭМС

Уравнение АЧХ –
 (41)
(41)
На рис. 22 представлена АЧХ двухмассовой ЭМС.


Рис. 22. АЧХ двухмассовой ЭМС
1.10. РАСЧЕТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКИХ ПЕРЕХОДНЫХ ПРОЦЕССОВ ДЛЯ ПУСКА ДВУХМАССОВОЙ ЭМС

Момент упругой связи –
 (42)
(42)
где

 .
(43)
.
(43)
Скорость 1-ой массы –
 ;
(44)
;
(44)
Скорость 2-ой массы –
 .
(45)
.
(45)
Графики упругого момента и скоростей первой и второй масс при Мс = 0 представлены на рис.22-23.

Рис. 22. График упругого момента при пуске Мс=0
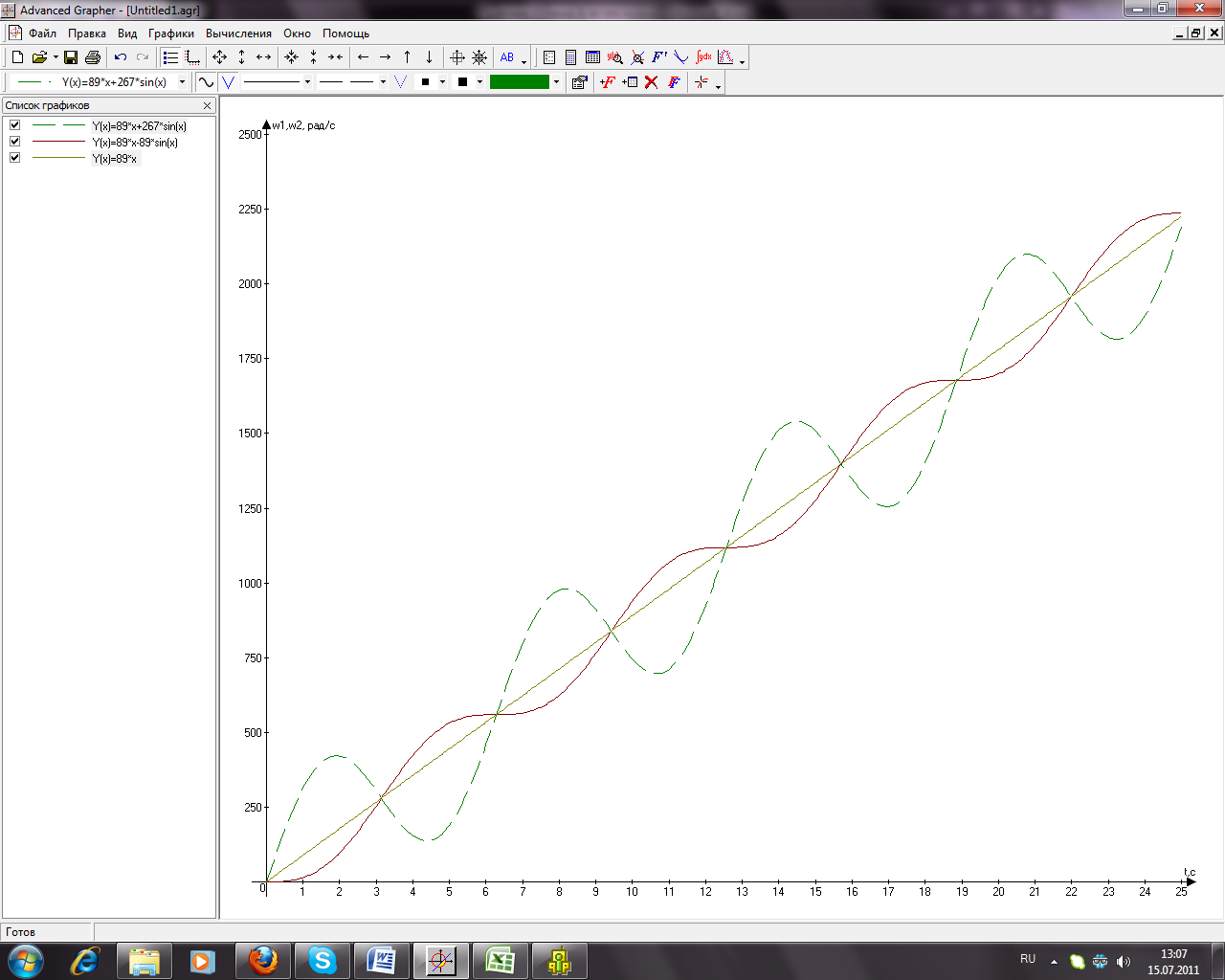
Рис. 23. Графики скоростей 1 и 2 массы при пуске Мс=0
1.11. ПОСТРОЕНИЕ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК В РАЗОМКНУТОЙ СИСТЕМЕ УП-Д
При
 -
-
 ;
(46)
;
(46)
Электромеханические характеристики в системе УП-Д представлены на
рис. 24.

Рис. 24. Электромеханические характеристики в системе УП-Д
1.12. Расчет переходных процессов в системе уп-д в режимах пуска, реверса и торможения
Расчет и построение графиков переходных процессов w=f(t), M=f(t) в системе УП-Д в режимах пуска до eпн =220 В, реверса до -eпн и торможения при известных Mc=Мн, JS = Jдв.
Задание на скорость изменяется по линейному закону: w0(t) = et. Поэтому величину ½e½ выбираем из условия пуска: e = (Ммакс - Mc)/JS. При расчетах реверса и торможения можно принять ½eр½=½eт½=½eп½. Момент статический по заданию принимаем реактивным и равным Мн.

1) Пуск
1 участок:
 (47)
(47)
2 участок:
 (48)
(48)
3 участок:
ωС = 146,49 (1/с); ωнач = 92,46 (1/с);
МС
= 38 (Н м); Мнач
= 133,76 (Н
м).
м); Мнач
= 133,76 (Н
м).
 (49)
(49)
2) Реверс
1 участок:
 (50)
(50)
2 участок:
 (51)
(51)
3 участок:
ωС = -146,49 (1/с); ωнач = -79,95 (1/с);
МС = -38 (Н м); Мнач = -155,95 (Н м).
(52)
3) Торможение
1 участок:
 (53)
(53)
2 участок:
ωС = 0 (1/с); ωнач = -33,64 (1/с);
МС = 0 (Н м); Мнач = 59,62 (Н м).
(54)
Зависимости w = f(t), M = f(t) и w0 = f(t) представлены на рис. 24. Динамические механические характеристики представлены на рис. 25.

Рис. 24. Зависимости w = f(t), M = f(t) и w0 = f(t) для системы УП-Д

Рис. 25. Динамическая механическая характеристика для системы УП-Д