

Глава 3
3.1 Устройства ввода программ
Система ЧПУ включает в себя ряд устройств, обеспечивающих считывание вводимой информации и преобразование ее в сигналы управления исполнительными двигателями станка и робота. В настоящее время конструкция УЧПУ зависит от типа программоносителя и способа ввода информации в УЧПУ.
Устройства ввода программ обеспечивают ввод программ в широком смысле этого термина (оперативное с внешней памяти, звуковое, световое и др.), т.е. считывание информации с программоносителя и передачи ее в виде электрических сигналов в специальных УЧПУ для дальнейшей обработки. Информация с перфолент считывается последовательным и параллельным способами. При последовательном способе программоноситель перемещается на шаг между строками и начинается считывание другой. Обработка информации происходит после считывания ее со всего кадра и записи в запоминающем устройстве. При параллельном способе одновременно считывается информация всего кадра и поэтому запоминающего устройства не требуется. Для считывания информации с перфолент применяют фотоэлектрические (со скоростью считывания 300 - 1000 строк/с) и электромеханические устройства.
Рисунок 3 – Схема фотосчитывающего устройства и лентопротяжного
механизма
























































На рисунке 3 представлено фотосчитывающее устройство (ФСУ) СЧПУ модели 2Р22 с элементами лентопротяжного механизма.

Транспортный ролик 1 непрерывно находится во вращательном движе-
жении. При подаче команды на протягивание ленты 2 включается транспортный магнит 3, якорь 4 которого прижимает к ленте ролик 5. В результате лента начинает протягиваться, разгоняясь при этом до скорости, определяемой частотой вращения транспортного ролика. Время разгона составляет 4-5 мс. Перфолента протягивается через оптический блок, состоящий из лампы 6, линзы 7 и фотодиодов 8.
Лампа, освещая перфоленту, при наличии в последней отверстий, коммутирует определенные фотодиоды, которые формируют параллельный код числа (или знака), пробитого в данной строке перфоленты в виде соответствующей комбинации напряжений, передаваемых дальше для обработки. Торможение по окончании протяжки перфоленты осуществляется якорем 9 при включении тормозного магнита 10 и отключении транспортного магнита 3. Время торможения – 1,5-2 м/с. Фотосчитывающее устройство может работать в трех режимах.
1. Покадровое считывание, при котором перфолента после поступления стартового сигнала движется до конца кадра, отмеченного
специальной меткой.
2. Построчное считывание информации (стартстопный режим), при котором перфолента после поступления стартового сигнала перемещается на одну строку и останавливается до поступления следующего стартового сигнала. Этот режим удобен при наладке СЧПУ.
3. Возврат в исходное положение всей обработанной бобины перфоленты, т.е. перемотка.
Достоинства и недостатки определяются не только качеством деталей, из которых собрано ФСУ, но и культурой производства, на котором собирают СЧПУ. Невысокая стойкость бумажной перфоленты (до 200 прогонов) обусловливает и возможные ошибки УЧПУ в системе выдачи исполнительных команд на приводы.
Устройство для считывания информации с магнитной ленты представлено на рисунке 4. Принцип записи программы на магнитную ленту основан на способности ферромагнитных материалов сохранять состояние остаточного намагничивания в виде диполей, соответствующих напряженности магнитного поля, которая создается при записи программы.
Применяются магнитные ленты шириной 35 и 19 мм, а также компактные кассеты МК-61, позволяющие записывать УП на 4-12 дорожках одновременно.
Магнитная лента 1 перемещается относительно магнитных головок 2 (количество головок соответствует количеству кодовых дорожек) с постоянной скоростью. Привод ведущего вала ленточного механизма 3 осуществляет электродвигатель 4, к которому с помощью ролика 5 прижимается магнитная лента. Электродвигатель имеет очень жесткую характеристику и практически не изменяет скорость вращения под нагрузкой, что обеспечивает постоянство скорости перемещения ленты. Электродвигатели 6 предназначены для натягивания ленты, работая в режиме намотка-тормоз, они имеют мягкие характеристики, позволяющие плавно снижать угловую скорость кассеты по мере заполнения ее лентой. Магнитная лента обычно перемещается со скоростью 100-200 мм/с.
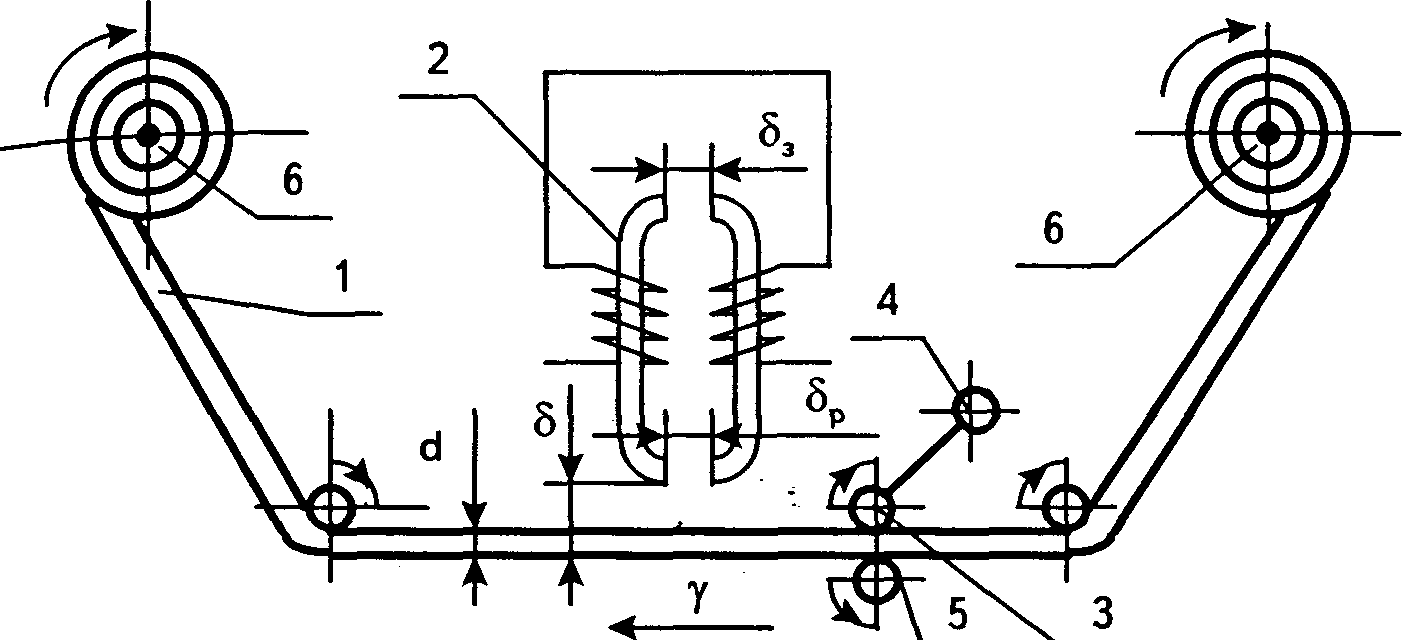
Рисунок 4 – Схема устройства для считывания информации с магнитной ленты
Магнитная головка 2 является одной из основных частей считывающего устройства и состоит из сердечника и обмотки. Сердечник состоит из двух полуголовок, разделенных рабочим и задним зазорами. При считывании на магнитную ленту управляющей программы диполи, проходя рабочий зазор магнитной головки, создают в ней переменный магнитный поток, который возбуждает ЭДС в катушках магнитной головки, и на выходе считывающего устройства появляются соответствующие электрические импульсы. Для работы УЧПУ требуется, чтобы сигнал считывания с магнитной головки был не менее 12-14 мВ. Значение сигнала считывания её зависит от многих факторов.
 ,
,
где W – число витков обмотки считывания;
- скорость перемещения магнитной ленты, м/с;
- остаточная индукция магнитного покрытия ленты, Тл;
d – толщина магнитного покрытия, мм;
b – ширина магнитного отпечатка сигнала управления, мм;
1отп – суммарная длина магнитного отпечатка, мм;
lст- длина отпечатка при подвижной магнитной ленте, мм;
- КПД магнитной головки;
- воздушный зазор между магнитной головкой и магнитным покрытием ленты, мм (не более 0,1 мм).
К достоинствам магнитной ленты необходимо отнести возможность многократного применения при смене текста управляющих программ.