

1.16 Краткие сведения о сети Петри
Сеть Петри представляет собой ориентированный граф с вершинами двух типов. На рис. 14.2 приведен пример сети Петри.
Вершины графа в виде кружков, обозначенных буквой «Р» с последующим номером, называются позициями.
Вершины графа в виде жирных черточек и обозначенных буквой «t» с последующим номером, называются переходами. Над переходами указывают логические функции f (So,…Si,…Sm). Начальной маркировкой сети Петри называется вектор HT=(n1, n2,…nn), число компонентов которого равно числу позиций в сети Петри, а сами компоненты выражаются натуральными числами. Для наглядности под ni понимают число точек в i–ой позиции. Например начальная разметка сети Петри на рисунке 14.2 имеет вид:
HT= (1,0,3).
Позиция Рi является входной позицией перехода tj, если существует дуга из Рi в tj.
Функционирование сети Петри основывается на следующих двух определениях. Переход называется возбужденным, если во всех его позициях находится хотя бы по одной точке. Переход срабатывает, если он возбужден, и выполняется логическое условие для данного перехода fi (S1,..Si), т.е. если эта функция принимает значение равное «I». При этом по одной точке из всех выходных позиций перехода переходят во все выходные позиции. Следует подчеркнуть, что изменение состояния сети Петри происходит в определенные моменты времени Т1, выполняется только одно логическое условие f3 (S1,S3). Тогда, в этот же момент времени одна точка из позиции Р3 перейдет в позицию Р1 и маркировка сети Петри имеет вид:
![]() .
.
Рассмотрим требования к сетям Петри, описывающим процесс автоматической работы автоматизированных комплексов. Сеть Петри называется «безопасной», если в каждой ее позиции в любой момент времени может находиться не более одной точки.
Сеть Петри называется «живой», если в ней не возникает тупиковых ситуаций, т.е. ситуаций, из которых невозможно изменение состояния сети Петри.
Сеть Петри называется «правильной», если она «безопасная» и «живая».
Технологические процессы автоматизированных комплексов должны описываться только «правильными» сетями Петри.
Действительно, безопасность сети говорит о том, что любая операция на автоматизированном оборудовании может быть повторно начата только после своего завершения. Например операция прохода копировального суппорта включает в себя быстрый подвод, рабочий ход и быстрый отвод. Если она находится в стадии выполнения, то повторное ее начало системой управления чревато поломкой инструмента или браком детали из-за быстрого хода во время процесса резания.
Живая сеть Петри соответствует тому, что, дискретный процесс работы автоматизированного оборудования может продолжаться бесконечно долго без самопроизвольных остановок.
1.17 Представление алгоритма работы автоматизированного
оборудования в виде сети Петри
Основу формализации алгоритма работы автоматизированного оборудования составляют типовые режимы нулевого и первого рангов применительно к механическому оборудованию. Эти режимы приведены в табл.ице 6
Таблица 6 - Типовые режимы работы узлов автоматизированного
оборудования
№п/п |
Ранг |
Условная запись |
График изменения технологической величины |
Примечание |
1 |
2 |
3 |
4 |
5 |
|
0 |
|
|
Движение исполнительного органа от путевого выключателя Si к Sj |
|
0 |
|
|
Постоянство позиции ИО между выключателем Si и Sj
|
|
|
|
|
|
 1
1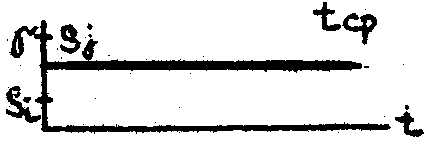 2
2
Продолжение таблицы 6
1 |
2 |
3 |
4 |
5 |
|
1 |
|
|
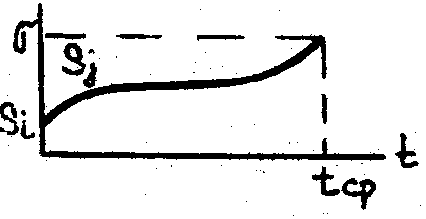
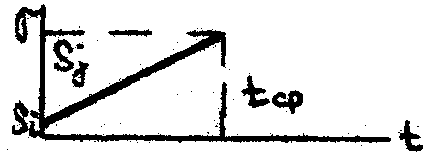
Движение ИО от Si до Sj с постоянной скоростью
|
|
1 |
|
|
Ускоренное движение от Si до Sj
|
|
1 |
|
|
Замедленное движение от Si до Sj
|
|
- |
Si
|
|
Зажим схвата приспособления Si – датчик зажима |
7 |
- |
|
|
Разжим схвата приспособления |
 3
3 4
4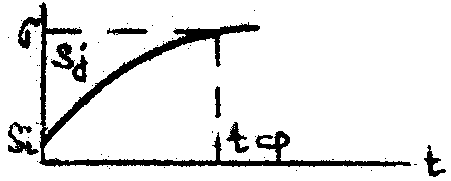 5
5

 6
6
Условные обозначения №6 и №7 в таблице 6 добавлены нами к типовым режимам. Следует заметить, что режимы №№3,4 и 5 следует применять обоснованно и обеспечивать соответствующими техническими средствами.
В качестве примера опишем работы манипулятора на рисунке 18.1 в терминах сети Петри с использованием типовых режимов.
Пусть манипулятор в начале поднимается от выключателя S1 и S2, выдвигает кисть от S5 до S4. Фрагмент сети Петри, описывающий эту последовательность движений, приведен на рисунке 18.2