

3 Мпс позиционно-контурного управления промышленными роботами
Применение позиционно-контурных систем расширяет технологические возможности ПР. Они разделяются на универсальные системы с центральным вычислителем и с децентрализованной структурой.
Пример микропроцессорной системы позиционно-контурного управления, предназначенной для ПР со следящими и дискретными приводами, в которой центральным вычислителем является микроЭВМ «Электроника - 60», представлен на рисунке 3.
Центральный вычислитель подключается к периферийным функциональным модулям через систему унифицированных шин связи по стандартному каналу. Кассетный накопитель на магнитной ленте (КНМЛ) является основным внешним программоносителем и совместно со своим блоком управления осуществляет прием, хранение и выдачу по запросу требуемой информации. Хранение программного обеспечения системы и т.д. осуществляется модулем ПЗУ. Отрабатываемая УП и промежуточные результаты вычислений хранятся в ОЗУ. Формирование временной выдержки и синхросигналов осуществляется таймерами.
ЦП - центральный процессор; УУ - устройство управления; ПО - пульт обучения; ККНМЛ - контроллер КНМЛ; ДР - датчики робота; ПР - приводы робота; МСД - модуль сопряжения с датчиком; МУП -модуль сопряжения с приводом; 1МВТК - модуль ввода технологических команд; 2МВТК - модуль вывода технологических команд; Т -таймер; ПО - пульт оператора.


Рисунок А3 – Функциональная схема таймерами
Задачей ЭВМ является обработка принятой с ПО и датчиков обратной связи информации, а также формирование УП в памяти устройства в режиме обучения, выдача сигналов управления следящим приводам робота и другому оборудованию в режиме отработки программы.
Конструктивно устройство выполнено в виде двух блоков: блока вычислителя и интерфейсного блока. Центральную часть вычислителя составляет микроЭВМ, в числе блоков которой - МП, модули оперативной памяти вместимостью 16К для хранения управляющих программ и перепрограммируемой памяти вместимостью 4К (для хранения математического обеспечения ЭВМ), модуль связи со стандартным считывающим устройством. Каналы ЭВМ и ЧПУ связаны через адаптер.
Основными режимами устройства являются обучение, автоматическая работа и ввод-вывод. В устройства, подключенные к каналу ЧПУ, входит дополнительный модуль внешнего ППЗУ объемом 16К, который предназначен для хранения системного математического обеспечения ЧПУ. Микроинтерполятор обеспечивает преобразование координатных микроприращений, вычисляемых программой интерполяции на постоянной несущей частоте 125 Гц, в унитарные последовательности импульсов, поступающих в интерфейсные блоки управления приводами.
В режиме «обучение» в процессе ручного управления манипулятором осуществляется запись УП в ОЗУ устройства, в режиме «автоматическая работа» - многократное, однократное или покадровое воспроизведение УП, в режиме «ввод-вывод» - обмен информацией между ОЗУ и КНМЛ.
4 Счпу для управления по трем координатам
УЧПУ состоит из вычислителя В и устройства управления шаговым приводом УУШП (рис.4). Вычислитель В предназначен для выработки сигналов управления перемещением исполнительных органов рабочего стола и вертикальной стойки, выполнения технологических команд, формирования сигналов линейно-круговой интерполяции и сигналов безразмерного перемещения по командам с пульта оператора.
УУШП преобразует выходные сигналы вычислителя в импульсы управления шаговыми двигателями подач.
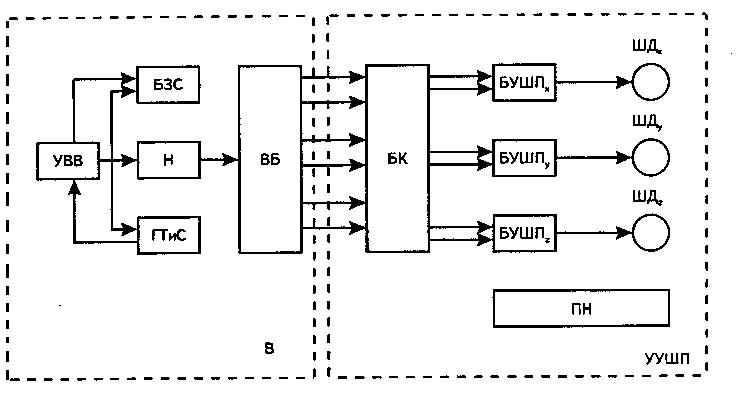
Рисунок А4 – Структурная схема УЧПУ
Устройство ввода-вывода информации УВВ содержит:
- устройство фотоввода (УФВ), состоящее из схем согласования выходов электрических сигналов фотосчитывающего устройства (ФСУ) с входами усилителей считывания и выходов УФВ с обмотками электромагнитов ФСУ;
- регистры ввода, предназначенные для ввода информации, содержащейся в одном кадре УП, и запоминания ее до считывания следующего кадра, а также для проверки каждого байта информации на четность;
- блоки управления, состоящие из схем управления регистрами, контроля по структуре адреса, формирования номера строки, выработки знака числа, сигнала сбоя УВВ, тактировки, управления вводом строки, выработки сигнала конца ввода и технологических остановов;
- регистр-преобразователь, предназначенный для построчного приема из регистров ввода числовой информации любого из адресов и хранения параллельного кода по данному адресу в течение необходимого для отработки интервала времени, для переписи параллельного кода числа в соответствующие буферные регистры, а также для преобразования параллельного двоично-десятичного кода числа в последовательный двоичный и записи его в соответствующие буферные регистры интерполятора;
- буферную память для хранения номера вводимого кадра;
- буферную память для хранения информации о технологических командах на время ввода с УП в регистры;
- рабочую память, предназначенную для вывода технологических команд на блок выходных реле с начала отработки введенного кадра до момента прихода следующей технологической команды;
- блок отображения цифровой индикации.
Интерполятор И состоит из следующих функциональных узлов:
устройства управления, трех интегралов (х, у, z), состоящих из буферного (РБ) и рабочего (РР) регистров и регистра-накопителя (РН), а также буферного и рабочего регистров обработки кадров.
Интерполятор определяет последовательность движения по координатам для введенных участков интерполяции. Совокупное движение по двум осям дает нужный контур обработки.
Геометрическая интерполяция задается по адресам X,Y,Z,I,S,M.
Число под адресом соответствует перемещению рабочего исполнительного механизма установки в соответствии с дискретностью системы, а знак «-» - направлению перемещения в выбранной системе координат. Если дискретность системы равна 0,01, а запись интерполяции Х+190537, то перемещение исполнительного механизма будет равно 1905,37 мм, совпадающим с направлением оси X.
При линейной интерполяции (ЛИ) вводятся: функция G 01 приращения по двум осям Х и Y и направление по осям. Для обработки заданной траектории необходимо ввести два кадра с геометрической информацией, причем приращениям присваиваются знаки (+) или (-) в соответствии с выбранным направлением координат.
При круговой интерполяции (КИ) вводятся: признак плоскости обработки, направление движения (по часовой стрелке функция G02, против часовой стрелки - G 03), величины приращения, а также координаты начальной точки относительно центра окружности.
Выходной блок ВБ состоит из трех аналогичных каналов, в каждом из которых имеются регистр РР, а также вентили направления. Для определения импульсов по плоскостям обработки имеются вентили. В регистрах накапливаются «шаги», вырабатываемые в интерполяторе.
При ЛИ импульсы с регистров поступают непосредственно на соответствующие вентили направления Вх, By, Bz, с помощью которых в зависимости от знака приращения они распределяются на каналы электронного коммутатора УУШП.
При КИ «шаги» поступают от интерполятора только на регистры РРх и РРу, а уже с них - через вентили распределения Вху, Byz по соответствующим осям. Так, например, импульсы с РРу при наличии признака знака в плоскости YZ (+1) направляются на отработку по координате Z. Интерполятор при работе по одной координате можно рассматривать как делитель частоты, который получает на входе одну частоту (частота циклов сложения) и в зависимости от величины обрабатываемого числа выделяет другую частоту. Так как выходная частота интерполятора значительно больше программируемой частоты, необходимо переводить работу вычислителя в реальный масштаб времени. Для этого информация о содержимом регистров выходного блока поступает в блок задержки скорости, где в зависимости от количества координат, по которым одновременно делается «шаг», частота подачи делится на заданное число (например, у3 ) для поддерживания постоянства контурной скорости. Заполнение регистров, которые относятся к большому приращению, происходит быстрее, чем регистров, соответствующих меньшим приращениям. Устройство выдает «шаг» только в направлении большего приращения или по диагонали.
Блок задания скоростей БЗС предназначен для формирования сигналов, частота следования которых соответствует заданной скорости, и для поддержания постоянства контурной скорости. В БЗС значение скорости подачи поступает с устройства ввода-вывода четырьмя двоично-десятичными разрядами. В соответствии с кодами ISO третий разряд служит для записи порядка скорости, два других - для записи старших разрядов скорости. Порядок скорости представляет собой десятичный множитель, значение которого на три единицы больше, чем количество цифр слева от запятой в числе, выражающем величину скорости подачи мм/мин. Например, скорость 4800 мм/мин записывается так: 748, а скорость 240 мм/мин - 624.
В состав БЗС входят следующие функциональные узлы: ввода скорости, интегратор, поддержания постоянства контурной скорости.
Преобразование заданной в мм/мин скорости, записанной с помощью узла ввода в соответствующую частоту, производится в интеграторе скорости (рис. 5), состоящем из рабочего регистра РРС, регистра-накопителя РНС и двоично-десятичного сумматора S.
Эта
частота определяется формулой![]() ,
,
где
fпер - частота переполнения РНС, Гц;
fц - - тактовая циклическая частота, Гц;
Sn - скорость подачи, мм/мин;
Срн - вместимость регистра накопителя, мм/мин;
Sn - скорость подачи, мм/мин;
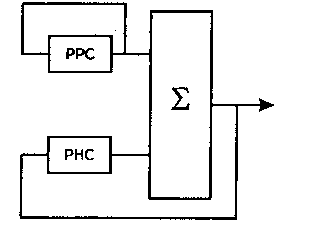
Рисунок А5 – Интегратор скорости
За каждый вычислительный цикл происходит сложение содержимого РРС, в котором записана скорость подачи, мм/мин, с содержанием РНС. Результат сложения записывается в РНС. Импульс переполнения РНС следует с частотой, превышающей программируемую скорость в три раза.
Работа узла поддержания постоянства контурной скорости заключается в том, что неравномерность следования импульсов переполнения РНС сглаживается при пропускании последовательности импульсов через делитель.
Числа складываются с помощью двоично-десятичного сумматора, работа которого происходит в два этапа: сложение в двоичном коде и анализ результата суммирования. На первом этапе, в случае если результат сложения в тетраде больше 1001, схема десятичного переноса вырабатывает код коррекции ОНО.
На втором этапе промежуточный результат суммирования складывается с корректирующим кодом и формируется окончательный результат. Для обеспечения постоянства контурной скорости, изменяющейся в зависимости от числа координат, участвующих в интерполяции в данном кадре, используются три коэффициента 1; 1,4;
1,75. Изменение выходной частоты пропорционально данным коэффициентам. Достигается это изменением делений импульсов переполнения регистра РНС, так что при отработке шага по одной координате импульсы переполнения РНС делятся на единицу, при одновременной отработке шага по двум координатам - на 7/5 (1,4); при отработке шага по трем координатам - 7/4 (1,75). Узел поддержания постоянства контурной скорости обеспечивает постоянство скорости подачи с точностью до + 6 %.
Генератор тактов и стробов ГТиС (рис.6) предназначен для обеспечения заданной последовательности синхронизирующих импульсов. Вычислительный цикл содержит пять стробов, каждый из которых состоит из четырех тактов. Задающий генератор выполнен по схеме RC-генератора с выходной частотой f = 950 кГц. Эта частота с помощью делителя частоты делится на четыре. Полученное значение поступает на усилители мощности. Схема формирования стробов построена на сдвиговом регистре. Каждый вычислительный цикл определяется формулой
![]() мкс,
мкс,
где - длительность такта вместе с паузой (период следования импульсов задающего генератора).
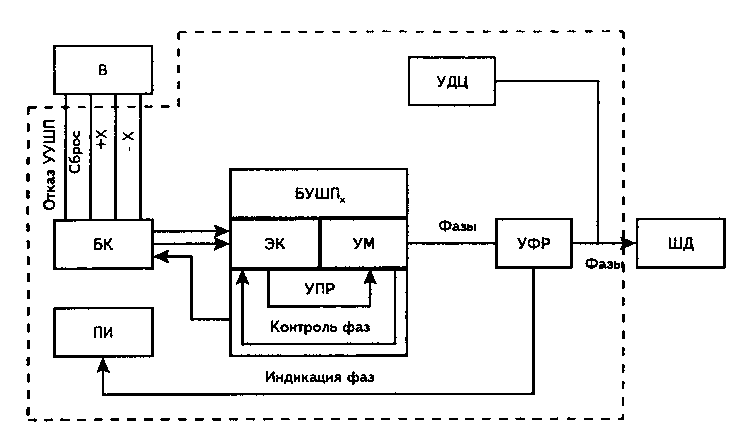
Рисунок А6 – Структурная схема УЧПУ для одной координаты
УУШП (рис.6) предназначено для преобразования, формирования и усиления сигналов унитарного кода, поступающих от вычислителя, в сигналы управления токами обмоток фаз шаговых двигателей. УУШП состоит из трех независимых устройств управления приводами по каждой координате.
В состав УУШП одной координаты входят: пульт индикации ПИ, блок контроля БК, блок управления шаговым приводом БУШП, узел форсирующих резисторов УФР, узел демпфирующих цепей УДЦ.
В свою очередь БУШП содержит электронный коммутатор ЭК и усилитель мощности УМ. Сигнал «сброс» из вычислителя В через БК поступает на вход БУШП. По этому сигналу все блоки БУШП устанавливаются в «нулевое» состояние, при котором включены первая и вторая фазы шаговых двигателей ДШ. Сигналы управления приводом (+ X) поступают с выхода БК в устройство ЭК, где происходит формирование сигналов коммутации. Эти сигналы усиливаются усилителями мощности и через узел форсирующих резисторов поступают в обмотки, создавая фазовые токи ШД, коммутируемые по заданному закону. Параллельно обмоткам ШД включен узел демпфирующих цепей, которые служат для ограничения перенапряжений, возникающих в обмотках ШД в момент их отключения. В выходных каскадах усилителей мощности формируются сигналы контроля состояния фа3 ШД, которые поступают на схему встроенного контроля, размещенного в БУШП.
При исправной работе УУШП сигналы «отказ» по каждой координате, сформированные в БУШП, поступают в БК, где с помощью логической схемы «И» формируется общий сигнал «отказ УУШП». При неисправности в цепи управления током любой фазы ШД по любой координате в БК формируется сигнал «отказ УУШП», который поступает в вычислитель и при этом загорается сигнальная лампа в БК. Состояние фаз ШД индуцируется с помощью ламп на ПИ, которые включены параллельно форсирующим резисторам.