

5.2.10 Ввод символов с клавиатуры. Опрос группы упорядоченных двоичных датчиков
В МП-контроллерах, требующих оперативной информации и ее отображения, возникает необходимость разработки аппаратной и программной частей интерфейса МП, для связи с оператором широкое распространение получили следующие средства ввода-вывода информации в МП-системах: разнообразные клавиатуры, линейные дисплеи на семисегментных светодиодных индикаторах, а также алфавитно-цифровые и графические дисплеи.
При проектировании интерфейса ввода-вывода МП-контроллера необходимо решать задачу об оптимальном (по ряду критериев) распределении функции между аппаратными и программными средствами интерфейса. В общем случае необходимо исходить из того, что применение специализированных БИС упрощает разработку и обеспечивает высокое быстродействие системы, но сопряжено с увеличением стоимости, объема и потребляемой мощности МП-контроллера.
По способам аппаратной реализации различают два типа клавиатур:
1. Кодирующие. У клавиатур этого типа схемным путем на выходе формируется код, соответствующий нажатой клавише. Примером могутслужить оцифрованные переключатели (на 10 или 16 позиций).
2. Некодирующие. Представляют собой матрицу двоичных переключателей, включенных на пересечении строк и столбцов матрицы (чаще всего 4х4 или 5х5). Идентификация и кодирование нажатой клавиши в таких клавиатурах выполняются программой. Переключатели 4х4 предназначены для ввода шестнадцатеричных кодов данных и команд, а 5х5, кроме этого, имеют еще и девять функциональных клавиш для управления режимом работы МП-контроллера.
5.2.11 Процедура ввода цифры с клавиатуры. Опрос матрицы двоичных датчиков
Процедура ввода числа с клавиатуры состоит из ряда частных процедур: ожидания нажатия клавиши, сканирования, устранения дребезга контактов, ожидания освобождения нажатой клавиши, обнаружения одновременного нажатия двух и более клавиш, определения веса нажатой клавиши (идентификация). Особенности реализации этих процедур при работе с клавиатурой вызваны тем, что группы клавиш объединены в матрицу 4х4 (рис. 61).
Вертикальные линии К1 (колонки или столбцы) являются выходными, а горизонтальные линии Ci (строки матрицы) - входными Для МП-контроллера. Один вывод каждой клавиши соединен с одной Из колонок Ki, а другой - с одной из строк Ci матрицы. Аналогичным способом в матрицу могут быть включены автономные двоичные датчики объекта управления, когда их много.
Сканирование. Частная процедура сканирования служит для обнаружения нажатой клавиши и последующей ее идентификации. Процедура состоит в последовательной выборке и считывании кода столбца строк матрицы клавиатуры. БСА представлена на рисунке 62.
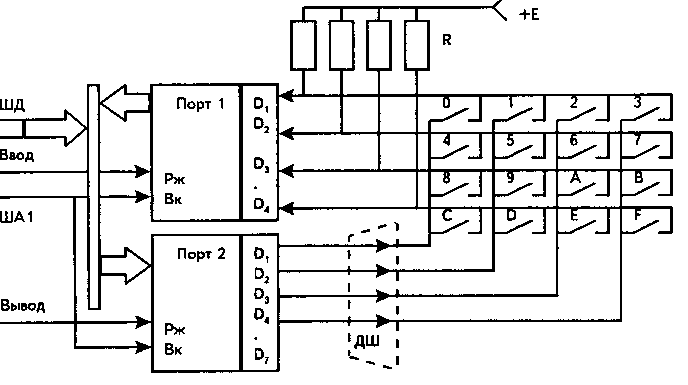
Рисунок 61 – Структура клавиатуры 4 х 4 и схема подключения ее к МП-контроллеру; ША - первый разряд шины адреса
Выборка столбца осуществляется выдачей в выходной порт слова выборки, формирующего в каждый момент времени значение логического 0 только на одной из вертикальных линий матрицы KI (активный столбец). На всех остальных вертикальных линиях матрицы должен быть сформирован уровень логической единицы. Столбцы выбираются последовательно, начиная с КО. Для этого МП-контроллер обеспечивает последовательную выдачу через порт 1 слов выборки бегущий нуль, т.е. последовательность кодов 1110, 1101, 1011, 0111, формируемую операциями сдвига. Для матриц большой размерности используется аппаратный способ формирования слов выборки бегущий нуль. К выходному порту подключается дешифратор, последовательность слов выборки будет иметь вид 00, 01, 10,11 и может быть сформирована программным счетчиком.
После каждой новой генерации слов выборки горизонтальные линии должны быть опрошены МП-контроллером. Если при опросе горизонтальная линия Ci приобретет значение 0 (активная строка), то имеется возможность программным путем определить нажатую клавишу, так как сигнал на входной горизонтальной линии будет иметь значение 0 только в том случае, если нажатая клавиша соединяет ее с вертикальной линией матрицы, на которой в данный момент времени присутствует уровень 0. МП-контроллер выполняет сканирование матрицы клавиатуры до тех пор, пока не обнаружит нажатую клавишу, после чего реализуется переход к частной процедуре устранения дребезга контакта.
Рисунок 62 – Схема алгоритма частной процедуры сканирования
Фрагмент программы сканирования:
-
SCAN:
MVI
A,OFFH ;
слово выборки – 11111110
SCAN1:
MOV
B,A ;
сохранение копии СВ в регистре В
OUT
01H ;
выдача СВ
IN
01H ;
считывание строк
CPI
OEFH ;
анализ состояния клавиш
JNZ
SCAN2
MOV
A,B
RLC
; сдвиг
CPL
OEFH
; опрошен последний столбец матрицы
JNZ
SCAN1
JMP
SCAN
SCAN2:
MOV
C,A
; сохранение кода активной строки
;в регистре С
DBOUNCE:
;начало частной процедуры DBOUNCE
В результате выполнения фрагмента программы SCAN в регистре 0 хранится код активной строки, т.е. код, содержащий нуль в разряде, соответствующем номеру строки, на пересечении которой с активным столбцом обнаружена нажатая клавиша и единицы во всех остальных разрядах.
Устранение дребезга контактов при вводе символа с клавиатуры реализуется программой временной задержки величиной 10-50 мс, после чего МП-контроллер переходит к частной процедуре ожидания освобождения нажатой клавиши.
Поскольку столбец, в котором обнаружена нажатая клавиша, известен, частная процедура ожидания освобождения нажатой клавиши в клавиатуре выполняется аналогично одноименной процедуре для группы кнопок, т.е. путем многократного считывания строк матрицы.
На рисунке 63. представлена БСА, а программа имеет вид:
WAITOP: |
MOV |
A,B |
; загрузка CВ в аккумулятор |
|
OUT |
01H |
; вывод СВ |
WAIT01: |
IN |
01H |
; считывание строк |
|
CPI |
OEFH |
; анализ состояния клавиш |
|
JNZ |
WAIT01 |
; если нажатая клавиша, то ждать |
KEYW: |
|
|
; начало частной процедуры |
|
|
|
; определения веса нажатой клавиши |
|
|
|
|