

4.3 Архитектура, система программирования микроЭвм «Электроника-60»
Одноплатная микроЭВМ «Электроника-60» используется для построения вычислительных комплексов, предназначенных для сбора, накопления и обработки цифровой информации моделирования и управления объектами в реальном масштабе времени. Разрядность микроЭВМ для чисел и команд составляет 16 двоичных разрядов, количество регистров РОН – 8, принцип работы основных устройств – параллельный, емкость ОЗУ до 32 Кбайт шестнадцатиразрядных слов, принцип построения ЭВМ – модульный, т.е. все функциональные блоки выполнены в виде конструктивно законченных устройств (модулей); связь между модулями производится через одну общую шину – канал обмена информацией (рис. 25).
Основным устройством ЭВМ является центральный процессор ЦП, который выполняет арифметико-логическую обработку данных и Управляет распределением времени использования канала при обращении к остальным модулям.
Центральный процессор построен на базе микропроцессорного набора БИС серии К581, состоящего из схемы управления - БИС бму (К581ИК2), схемы регистрового АЛУ - БИС РАЛУ (К582ИК1) и трех БИС МПЗУ для хранения микрокоманд ЭВМ (К581РУ1 К581РУ2, К581РУЗ). Все БИС соединены микроканалом (МК) из 22 линий связи (рис. 26).
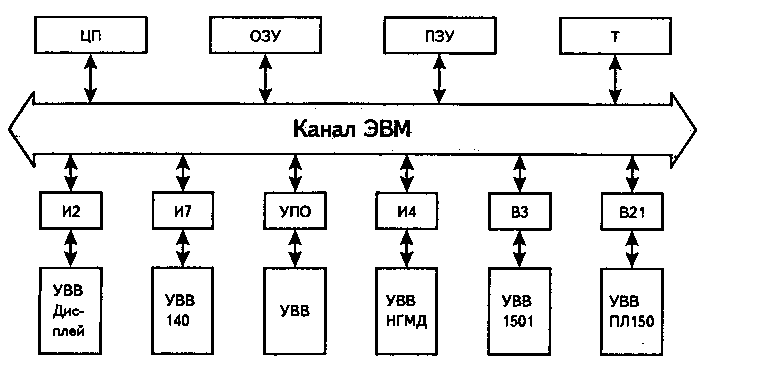
Рисунок 25 – Структурная схема микроЭВМ «Электроника-60»
Блок управления каналом (БУК) ЭВМ обеспечивает взаимодействие канала ЭВМ с блоком ЦП. БИС РАЛУ состоит из блока АЛУ, блока 8 РОН, два из которых являются указателем стека SP и счетчиком команд PC, блока дешифратора РОН и шестнадцатиразрядного регистра состояний процессора, в котором используются шесть разрядов для определения текущего приоритета ЦП (разряд 7), Т – разряда прерывания программы при ее отладке (разряд 4) и разряды условий ветвления по знаку результата N (разряд 3), по равенству результата нулю Z (разряд 2), по арифметическому переполнению V (разряд 1) и переносу единицы С (разряд 0).
Связь через канал замкнутая и асинхронная, т.е. на управляющий сигнал активного устройства, например ЦП, поступает сигнал пассивного устройства, например ОЗУ, а выполнение операций передачи данных не зависит от тактовых импульсов и происходит с максимально возможным для данного устройства быстродействием.
Управляющая программа и данные записываются в ОЗУ или считываются с внешних устройств ввода-вывода УВВ через интерфейсы. Интерфейсы могут быть ориентированными на связь ЦП со стандартным УВВ (дисплеем, перфоратором и т.д.) или универсальными, которые при необходимости за счет наличия дополнительных линий связи задействуются с любым УВВ пользователя (датчики СЧПУ и др.). Интерфейсные блоки состоят из регистров состояния и регистров данных приемника и передатчика. Обмен между устройствами выполняется как шестнадцатиразрядными словами, так и байтами в трех режимах: программном, в режиме прерывания и режиме прямого доступа к памяти.
Интерфейс И2 служит для подсоединения к каналу ЭВМ устройств УВВ обмена данных в шестнадцатиразрядном параллельном коде (пульт оператора, дисплей и др.).
Интерфейс И 7 предназначен для подключения к каналу ЭВМ устройств УВВ данных в восьмиразрядном параллельном коде (цифропечатающее устройство «DZM-180» и «Роботрон 1156»).
Интерфейс УПО (устройство последовательного обмена) служит для подсоединения к каналу ЭВМ устройств ввода-вывода для обмена данными в последовательном коде по двухпроводной линии; используется для связи с удаленными от ЭВМ объектами, когда нецелесообразно соединять ЭВМ и объект многопроводным каналом связи для передачи данных в параллельном коде.
Интерфейс И4 выполняет в составе вычислительного комплекса функции обмена информацией между каналом ЭВМ и контроллером НГМД (внешняя память), регенерации динамической памяти в режиме прямого доступа и начальной загрузки системы.
Р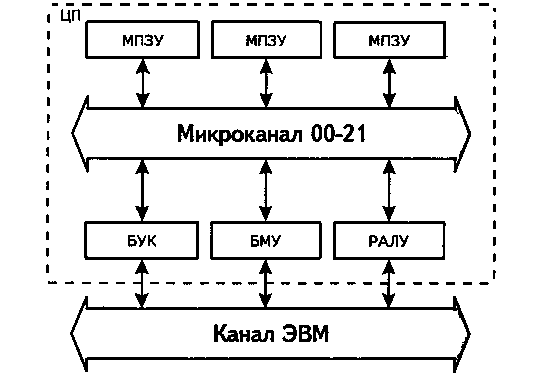 исунок
26 –
Структурная схема центрального процессора
микроЭВМ «Электроника-60»
исунок
26 –
Структурная схема центрального процессора
микроЭВМ «Электроника-60»
Интерфейс ВЗ предназначен для ввода данных в ЭВМ с фотосчитывающего устройства «FS1501» или «СПЗ».
Интерфейс В21 служит для вывода данных из ЭВМ на ленточный перфоратор «ПЛ-150М».
Программирование микроЭВМ и микропроцессорных систем зависит от аппаратных возможностей и характеристик современных микроЭВМ и микропроцессоров.
Основной системой команд, унифицированной в разработках программного обеспечения многих микро- и миниЭВМ, является система команд микроЭВМ «Электроника-60» и ее модификаций. Базовые варианты системы применяются в ЭВМ типа НЦ-80-01, НМС 111001, CMC 121.2, СМ-3, СМ-4 с модификациями (процессоры этих ЭВМ имеют единую архитектуру и программную совместимость) и используются в составе систем ЧПУ и модулей ГПС (2С42, 2С85 2У32, 2МЧЗ и др.). Эта же система рекомендована к применению в странах СЭВ.
В настоящее время и ближайшие годы разработка системных программ для систем ЧПУ будет выполняться на языке Ассемблер с применением кросс-средств, так как из-за большого объема логических преобразований и работы в реальном масштабе времени программирование управляющей ЭВМ на языке высокого уровня – непригодно.
Система команд микроЭВМ «Электроника-60» позволяет разрабатывать как программное обеспечение работы системы управления станков с ЧПУ, ПР и модулей ГПС, так и составлять программы для обработки деталей на этом оборудовании.
Базовый вариант операционной системы состоит из Ассемблера, компоновщика, редактора текста и отладчика программ. В данном параграфе рассмотрена основа базового варианта – язык Ассемблер микроЭВМ «Электроника-60».