

6.Расчёт планетарного редуктора.
6.1. Исходные данные.
Передаточное
отношение планетарного редуктора-
Модуль колёс планетарного редуктора: m1= мм
Число сателлитов к=3
Угловая
скорость водила ω1=

Число
оборотов водила

6.2. Условия проектирования.
П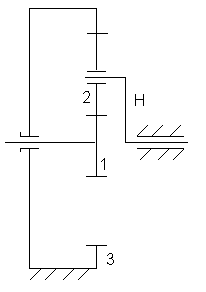 ланетарным
называют механизм, составленный из
зубчатых колес и вращающихся звеньев,
на которых располагаются подвижные оси
зубчатых колес. Основным достоинством
планетарных механизмов является то,
что их масса и габариты значительно
меньше массы и габаритов зубчатых
механизмов с неподвижными осями, при
одинаковых передаточных отношенях и
передаваемых моментах.
ланетарным
называют механизм, составленный из
зубчатых колес и вращающихся звеньев,
на которых располагаются подвижные оси
зубчатых колес. Основным достоинством
планетарных механизмов является то,
что их масса и габариты значительно
меньше массы и габаритов зубчатых
механизмов с неподвижными осями, при
одинаковых передаточных отношенях и
передаваемых моментах.
1.Солнечная шестерня
2.Сателлит.
3.Коронная шестерня
Н- водило
Основные соотношения и условия проектирования:
Формула Виллиса:
Условие
соосности:

Условие
соседства:
Рис.6.1.Схема
планетарного редуктора.

Условие
сборки
 ,
где к- число сателлитов ;с- целое число.
,
где к- число сателлитов ;с- целое число.
Из условия отсутствия подрезания и заклинивания имеем
Z1 18; Z2
20;
Z3
85
18; Z2
20;
Z3
85
6.3.Подбор чисел зубьев
Проектирование планетарного механизма заключается в определении наименьших чисел зубьев и диаметров начальных(делительных) окружностей, учитывая условия соосности, соседства, собираемости.
1.Передаточное число планетарного редуктора
2.Передаточное
число обращенного механизма

3.Примем Z1=
4.Число зубьев
короной шестерни – Z3

5.Из условия
соосности определяем число зубьев
сателлитов Z2=
6.Из условия
соседства определяем максимальное
количество сателлитов:

 при к=4
при к=4
 при к=3
при к=3

принимаем к=3
7. Проверяем
условие собираемости.

8.Фактическое
передаточное отношение:


9.Число зубьев планетарного редуктора
Z1= Z2= Z3=
10.Диаметры делительных окружностей, мм
R1=0,5m1z1= R2=0,5m1z2= R3=0,5m1z3=
6.4.Графическое исследование планетарного редуктора
Вычерчиваем
кинематическую схему в масштабе в двух проекциях.
в двух проекциях.
Строим
план скоростей и план чисел оборотов
звеньев в масштабе

где
ω=ω1·

Определяем передаточное число редуктора
а)с
помощью плана скоростей

б)
с помощью плана чисел оборотов.

Определяем числа оборотов звеньев планетарного редуктора
обороты кривошипа
n=0,1·
обороты водила n1= nн= ОН·
обороты сателлитов n2=0,2·