

4.Кинематическое исследование рычажного механизма двигателя. 4.1.Исходные данные:
Размеры звеньев рычажного механизма, м
0А=0С=r= АВ=СD=l= AS2=CS4=AB/3=CD/3
Угловая скорость кривошипа, рад/сек
ω1=
4.2.Построение планов положений механизма.
Из центра О- оси вращения кривошипа С0А- радиусами, равными длине(l+r) и (l-r)
в масштабе µе=…………………на оси X-X движения ползунов отмечаем ближние Во и Dо и дальние В4, D4 крайние положения поршней. Траекторию движения точек А и С кривошипа делим на восемь равных частей. За начало отсчёта принимаем положение при котором левый поршень 3 находится в крайнем правом положении.
Из полученных точек А0, А1……А7 и С0, С1, С7 радиусами l делаем засечки на линии X-X. Получаем положение точек В0, В1……В7 и D0,D1…….D7. Соединив точки А0, А1……А7 с центром О и соответствующими точками В0, В1……В7, а также точкиС0, С1…… С7 с центром О и соответствующими точками D0,D1…….D7 получим планы механизма.
Кривые, последовательно соединяющие центры тяжести шатунов S2(S4) в различных положениях, будут траекториями движения этих центров
4.3.Построение планов скоростей, рис.4.1.
Скорость точек А и С кривошипа(и шатунов АВ, СD)
VА=ω1·ОА=
VС=ω1·ОС=
Векторы
 А
и
С
направлены перпендикулярно оси кривошипа
в сторону его вращения
А
и
С
направлены перпендикулярно оси кривошипа
в сторону его вращения
Масштаб плана
скоростей-

где ра = мм- длина отрезка на плане скоростей.
Скорость точек В и D ползунов 3 и 4 находим, используя векторные уравнения:

В этих уравнениях
векторы
 направлены по горизонтали.
направлены по горизонтали.
Векторы
 и
и
 перпендикулярны осям шатунов ВА и DС.
Скорость центров
тяжести шатунов VS2
и VS2
находим, используя
теорему о подобии:
перпендикулярны осям шатунов ВА и DС.
Скорость центров
тяжести шатунов VS2
и VS2
находим, используя
теорему о подобии:

 откуда
откуда
as2=ab
· cs4=
cs4=
Соединив
точки S2
и S4
с полюсом планов скоростей, получаем
векторы скоростей
 и
и
 .
.
Из планов скоростей находим:
VB=pb·µv; VD=pc· µv; VBA=ba· µv ; VDC=dc· µv;
Vs2=ps2· µv; Vs4=ps4· µv
Угловые скорости шатунов ω2 и ω4 находим по формулам:
ω2=VBA/BA; ω4=VDC/DC.
Для положений № , VB = , VBA= , VDC= ,VD=
Vs2=
, Vs4=
,ω2
,ω4
Для остальных положений результаты
расчётов представлены в таблице 4.1.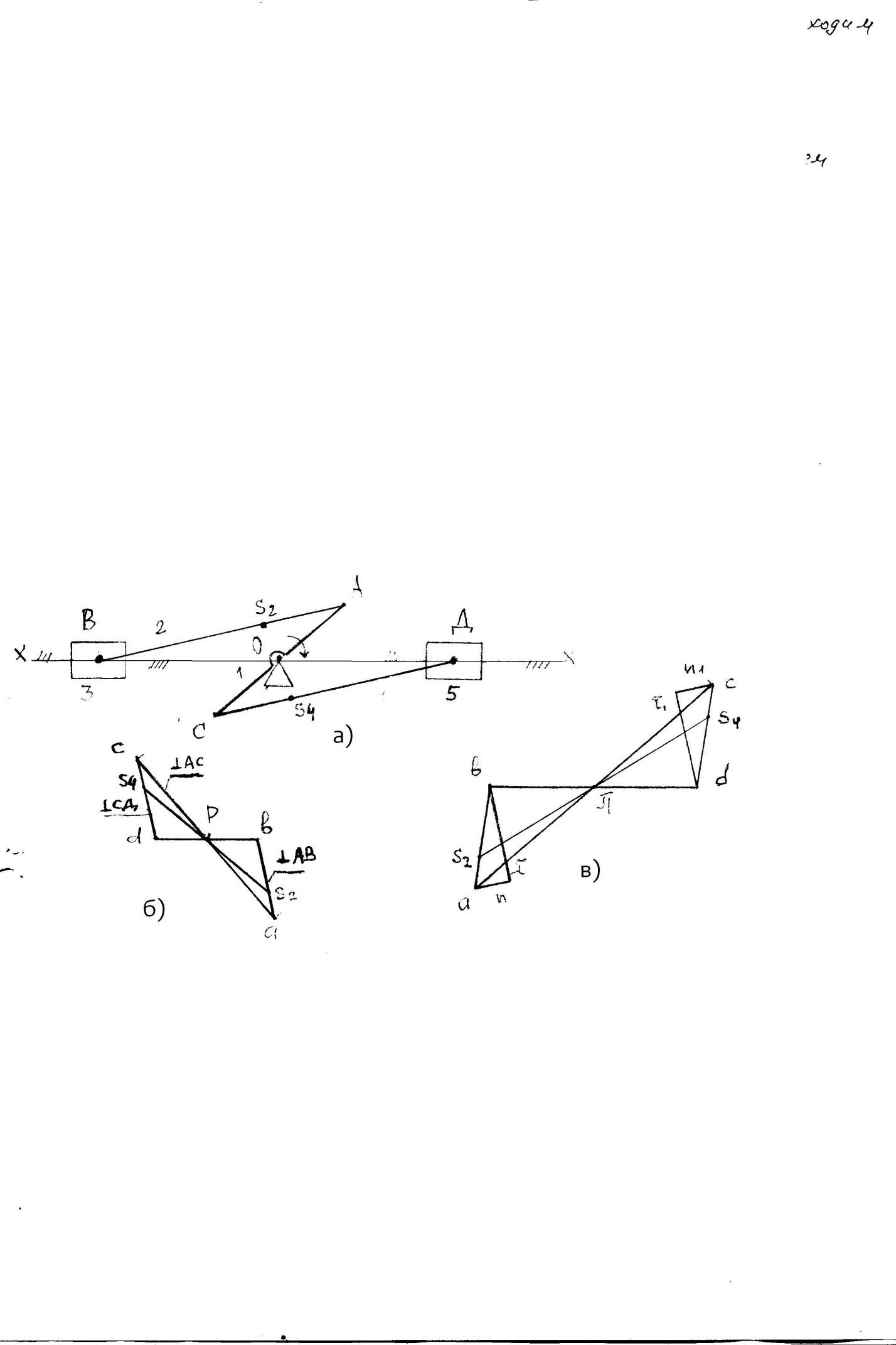
Рис.4.1. Планы скоростей и ускорений
Значения скоростей точек и угловых скоростей звеньев. Таблица.4.1.
№пол- ожения |
Размер- ность |
VA=VC |
VBA |
VB |
VDC |
VD |
Vs2 |
Vs4 |
Рад/сек |
|
ω2 |
ω4 |
|||||||||
0, 6
|
мм |
|
|
|
|
|
|
|
|
|
м/с |
|
|
|
|
|
|
|
|
|
|
1, 11 |
мм |
|
|
|
|
|
|
|
|
|
м/с |
|
|
|
|
|
|
|
|
|
|
2, 10 |
мм |
|
|
|
|
|
|
|
|
|
м/с |
|
|
|
|
|
|
|
|
|
|
3, 9 |
мм |
|
|
|
|
|
|
|
|
|
м/с |
|
|
|
|
|
|
|
|
|
|
4, 8 |
мм |
|
|
|
|
|
|
|
|
|
м/с |
|
|
|
|
|
|
|
|
|
|
5, 7 |
мм |
|
|
|
|
|
|
|
|
|
м/с |
|
|
|
|
|
|
|
|
|
|
4.4.Построение планов ускорений, рис.4.1. 4.4.1.Ускорения точек А и С кривошипа 1 и шатунов АВ и СD
Вектор направлен от точки А к точке О по прямой
АО.
направлен от точки А к точке О по прямой
АО.
 направлен от точки
С к точке О.
направлен от точки
С к точке О.
4.4.2.Масштаб плана ускорений.
 =
,где
па =………мм.
=
,где
па =………мм.
4.4.3.Ускорение точек В и D шатунов АВ и СD и ползунов В и D.




Для положений механизма №………….

Ускорение точек В и С получаем построением многоугольников ускорений этих точек согласно уравнениям а) и б)

4.4.4.Ускорение
центров масс S2
и S4 ; находим? используя теорему о подобии.
находим? используя теорему о подобии.

Соединив точки S2
и S4 с
полюсом планов ускорений получаем
получаем

4.4.5.
Угловые ускорения шатунов 2
и
4
определяем по формулам
2
и
4
определяем по формулам

Для положения
механизма №……..величины ускорений
равны:


Значения ускорений для других положений представим в виде таблице 4.2.
Ускорение точек и угловые ускорения звеньев. Таблица.4.2.
№ |
Размер- ность |
Wa=Wc |
|
|
|
|
|
|
|
|
Рад/с2 |
|
|
|
|||||||||||
1 |
мм |
|
|
|
|
|
|
|
|
|
|
|
м/с2 |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
мм |
|
|
|
|
|
|
|
|
|
|
|
м/с2 |
|
|
|
|
|
|
|
|
|
|
|
|
7 |
мм |
|
|
|
|
|
|
|
|
|
|
|
м/с2 |
|
|
|
|
|
|
|
|
|
|
|
|
10 |
мм |
|
|
|
|
|
|
|
|
|
|
|
м/с2 |
|
|
|
|
|
|
|
|
|
|
|
|









