

3.1.7.3 Определение оптимальной траектории посадки одиночного воздушного судна
Оптимальная траектория одиночного ВС tr, доставляющая минимум рассмотренному критерию (3.1), определяется минимальной своей длинной между точками ТВХ и ТНС. Этой длине будет соответствовать минимальный интервал времени Тгм в выражении (3.5), так как значение координат всех остальных характерных точек (ТГП, ТВГ, ТК) и параметров траекторий посадки известны и практически постоянны (и не могут быть изменены) для одинаковых типов ВС.
Таким образом, рассматриваемая задача состоит в определении кратчайшей траектории полета ( кратчайшего пути) для i-го ВС между точками ТВХi и ТНС из множества допустимых для i-го ВС траекторий (TRi) для выполнения посадки i-го ВС, появившегося в момент времени t в точке (Х, Y) входа в аэродромное ВП на высоте h. Рассматриваемая задача решается с помощью следующих построений.
Для определения множества TR-допустимых траекторий посадки одиночного ВС из двух центров разворотов в точке ТВХ (ЦRТBX и ЦLТBX) проведем векторы Q;\s \up0(¯ij в два центра разворотов в точке ТНС (ЦRТНС и ЦLТНС). Таких векторов будет четыре:
— векторы Q;\s \up0(¯11 и Q;\s \up0(¯12 имеют началом точку ЦRТBX и оканчиваются в точках ЦRТНС и ЦLТНС соответственно;
— векторы Q;\s \up0(¯21 и Q;\s \up0(¯22 начинаются в точке ЦLТBX и оканчиваются в точках ЦRТНС и ЦLТНС соответственно.
Координаты точек начала и конца этих векторов обозначим (Х, Y) и (Х, Y), тогда модули этих векторов будут определяться выражениями
Qij |Q;\s \up0(¯ij| , где Х\S \up1(= Х X; Y\S \up1(= Y Y,
а направление — азимутом Aij (углом между северным направлением меридиана, проходящего через центр разворота, и линией, соединяющей центры окружностей, точек ТВХ и ТНС, отсчитываемый по ходу часовой стрелки) в пределах от 0 до 360.
Азимуты векторов Q;\s \up0(¯ij вычисляются с помощью рассмотренной функции А по модулю В:
Aij (arctg 2) mod 2.
При определении значения углов в градусах используется известное соотношение [град] [рад]180/.
Для выполнения посадки любого ВС, в общем случае из всего множества допустимых для него траекторий предпочтительными являются, как правило, не более четырех траекторий TR={trj; j 1, 2, 3, 4}, среди которых существуют и оптимальные (самые короткие), доставляющие минимум критерию (3.1). Конкретное число таких траекторий зависит от расстояний между центрами разворотов в точках ТВХ и ТНС.
Если существует такой вектор Q;\s \up0(¯ij, модуль которого Qij< 2r , то траектории виражей радиуса r в точках ТВХ и ТНС пересекаются (рисунок 3.27). В этом случае существует не более трех траекторий движения между точками ТВХ и ТНС TR {tr1, tr2, tr3}, среди которых имеется хотя бы одна кратчайшая.
Первая возможная траектория посадки ВС (tr1) включает следующие элементы:
— разворот вправо по окружности с центром в точке ЦRТВХ на угол ;
— касательную прямую к окружностям с центрами ЦRТВХ и ЦRТНС;
— разворот вправо по окружности с центром в точке ЦRТНС на угол .
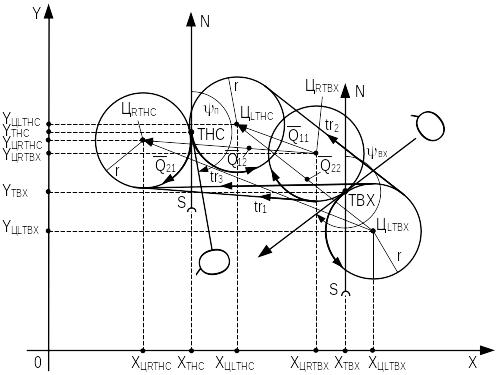
Рисунок 3.27 — Траектории виражей точек входа и посадки пересекаются
Угол разворота вправо по окружности с центром ЦRТBX до азимута касательной определяется как разность азимута А11 вектора Q;\s \up0(¯11 и курса ВС вх:
\s \up1(1 ((А11 вх) 2) mod 2.
Интервалы времени, необходимые для первого разворота с центром в точке ЦRТBX и движения по прямой параллельной векторуQ;\s \up0(¯11 до точки начала второго правого разворота определяются выражениями:
Т\S \up1(1 , Т11 .
Угол второго разворота вправо по окружности с центром ЦRТНС от точки конца касательной до точки ТНС определяется выражением:
((п А11) 2) mod 2,
а интервал времени, необходимый для этого Т\S \up1(2 /.
Тогда, полное время полета ВС по траектории tr1 между точками ТВХ и ТНС будет определяться выражением:
T\S \up1(п (\s \up1(1 ).
Вторая возможная траектория посадки ВС (tr2) включает:
— разворот влево по окружности с центром в точке ЦLТВХ на угол ;
— касательную прямую к окружностям с центрами ЦLТВХ и ЦLТНС;
— разворот влево по окружности с центром в точке ЦLТНС на угол .
Параметры движения ВС по указанным элементам траектории tr2 определяются следующими соотношениями:
((вх А22) 2) mod 2;
Т\S \up1(1 ; Т22 ;
\S \up1(2 ((А22 п) 2) mod 2;
Т\S \up1(2 .
Тогда полное время полета ВС по траектории tr2 между точками ТВХ и ТНС будет определяться выражением:
T\S \up1(п (\s \up1(2 ).
Третья возможная траектория посадки ВС (tr3) включает:
— разворот влево по окружности с центром в точке ЦLТВХ на угол \s \up1(3;
— касательную прямую к окружностям с центрами ЦLТВХ и ЦRТНС;
— разворот вправо по окружности с центром в точке ЦRТНС на угол \S \up1(3.
Эта траектория будет длиннее первых двух за счет более длинных виражей по окружностям с центрами ЦLТВХ и ЦRТНС даже при возможном равенстве длин прямолинейных участков траекторий.
Таким образом, определение оптимальной траектории посадки ВС будет связано со следующими решающими правилами:
— если (Т\S \up1(п Т\S \up1(п) 0, то оптимальной является траектория tr1 и Tпо=Т\S \up1(п;
— если (Т\S \up1(п Т\S \up1(п) 0, то оптимальной является траектория tr2 и Tпо=Т\S \up1(п;
— если (Т\S \up1(п Т\S \up1(п) 0, то обе траектории оптимальны и можно использовать любую из них.
В том случае, когда для любого из векторов Q;\s \up0(¯ij справедливо соотношение |Q;\s \up0(¯ij| 2r (см. рисунок 3.28), число возможных допустимых и наиболее коротких траекторий полета ВС между точками ТВХ и ТНС будет равно четырем (TR {tr1, tr2, tr3, tr4}). Параметры этих траекторий и периоды времени, необходимые для совершения посадки находятся с помощью построений, аналогичным рассмотренным выше. В этом случае оптимальной будет являться некоторая j-ая траектория посадки, которой соответствует минимальное время Т\s \up1(п, при j=1, 2, 3, 4:
Т\S \up1(оп min{Т\S \up1(п, Т\S \up1(п, Т\S \up1(п, Т\S \up1(п}.

Рисунок 3.28 — Траектории виражей точек входа и посадки не пересекаются