

3.1.7.2 Определение параметров траектории посадки воздушных судов
Интервал времени Tп, требуемый для выполнения посадки одиночного ВС и определяемый от момента оценки параметров его траектории в точке с координатами Х0, Y0, h0 до момента касания ВПП, определяется суммой следующих интервалов времени:
Тп Тоб Тгм Тсн Тгп Тгл , (3.5)
где Тоб — время (константа аэродрома) от момента входа ВС в ВП аэродрома в точке Х0, Y0, h0 до точки входа на траекторию посадки (ТВХ), требуемое для обработки радиолокационных и полетных данных о ВС, оценки параметров его движения, принятия решения о посадке и передачи на борт команды начала маневра посадки в точке ТВХ (в это время ВС сохраняет начальную скорость V0, крен γ0 и высоту полета h0 hвх); Тгм — минимизируемое время горизонтального маневрирования ВС по схеме «разворот-прямая-разворот» от точки ТВХ до точки ТНС на высоте hвх; Тсн — время снижения ВС с высоты hвх до высоты hТВГ между точками ТНС и ТГП под углом снижения сн, максимально допустимом для данного типа ВС (Тсн (hвх hТВГ)/Vcн; Vcн V0 sin сн — скорость снижения ВС); Тгп — время (константа аэродрома) прямолинейного горизонтального полета на высоте hТВГ между точками ТГП и ТВГ (за это время скорость ВС должна быть снижена до скорости посадки Vп и установлен посадочный курс п); Тгл — время полета по глиссаде посадки со скоростью Vп от точки ТВГ до точки касания ВПП (Тгл Sгл/Vп; Sгл — длина глиссады; LТВГ — константа аэродрома, определяющая удаление ТВГ по горизонтали от точки касания ВПП).
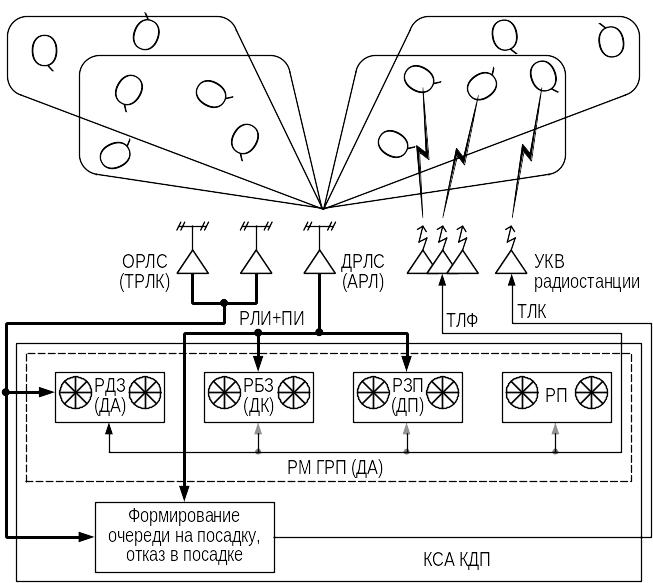
Рисунок 3.24 — Структура автоматизированного КДП
ОРЛС — обзорная РЛС; ТРЛК — трассовый радиолокационный комплекс; ДРЛС — диспетчерская РЛС; АРЛ — аэродромный радиолокатор; РЛИ — радиолокационная информация; ПИ — полетная информация; РП — руководитель полетов; РМ ГРП — рабочие места группы руководства полетами; ДА —диспетчеры аэродрома; ТЛФ —телефонный канал связи; ТЛК —телекодовый канал связи; РЗП —руководитель зоны посадки (ДП —диспетчер посадки); РДЗ —руководитель дальней зоны (ДП —диспетчер подхода); РБЗ —руководитель ближней зоны (ДК —диспетчер круга)
Координаты точки ТНС определяются следующим образом (см. рисунок 3.23)
XТНС XТК (LТВГ LГП LСН) sinп; YТНС YТК (LТВГ LГП LСН) cosп,
где XТК, YТК — координаты точки касания (ТК) воздушным судном ВПП; LГП VсрТгп — расстояние по горизонтали между точками ТВГ и ТГП; Vср (V0 Vп)/2 — средняя скорость горизонтального прямолинейного полета между точками ТВГ и ТГП; LСН (hвх hТГП)сtgсн — расстояние по горизонтали между точками ТГП и ТНC.
Координаты точек входа в ВП аэродрома Хвх, Yвх ВС с учетом времени на обработку Тоб определяются для двух вариантов начальных условий:
— ВС входит в ВП аэродрома без крена (0=0), по прямой на ДПРМ, имея координаты Х0, Y0, h0 и курс 0, тогда
Х V0Тоб sin0, Y V0Тоб cos0 и Хвх Х0 Х, Yвх Y0 Y. (3.6)
— ВС входит в ВП аэродрома с креном (0 0) в направление на ДПРМ, имея координаты Х0 ,Y0, h0 и курс 0. Другими словами, ВС в данной точке находится в состоянии выполнения разворота (при 0 — вправо, при <0 —влево). На интервале времени Тоб этот разворот должен быть завершен в точке ТВХ с курсом вх. Текущий курс ВС изменяется от значения 0 до значения вх на величину (реализуется управление по изменению курса ВС), которая при правом развороте имеет положительное значение, а при левом —отрицательное и определяется соотношением
tg0 Tоб.
Если в процессе выполнения разворота с креном 0 на интервале времени Тоб воздушное судно пересекает северное направление меридиана, то в момент пересечения текущее значение курса 0 при правом развороте обнуляется, а при левом развороте принимает значение 360. Разворот выполняется до момента выхода ВС в точку ТВХ с курсом вх.
При вычислении значений курсового угла 0 , которые по физическому смыслу всегда являются положительными и меньше 360, возможно получение как отрицательных, так и положительных значений 360 (за счет положительных или отрицательных значений ). Для предотвращения такого рода ошибок применяется специальный способ функционального преобразования одной величины в другую (вычисление значения «А по модулю В» — А mod B). Смысл этого способа поясняет следующее выражение: А mod B С, где С А nВ; n 0, 1, 2, ..., m. Другими словами, А mod B есть либо сама величина А (при А0 и А<В, т.к. n 0), либо значение остатка от операции вычитания из величины А целого числа (кратного количества) величины В (при А0 и АВ, т.к. n0).
При вычислении значений курсовых углов или углов каких-либо направлений движения (азимутов) в качестве величины В используются значения 360 (или 2), а в качестве величины А — суммы (0360) или (02) соответственно. Слагаемые 360 (или 2) позволяют перейти от возможных отрицательных значений суммы (0) к положительным (0360), не изменяя существо процедуры вычисления истинного значения курсового угла, которые всегда будут удовлетворять условию 0≤<360).
Таким образом, значение курса ВС в точке ТВХ вх при управлении в точке (Х0,Y0) будет определяться выражениями:
вх (0360) mod 360, если углы исчисляются в градусах, или
вх (0++2) mod 2, если углы исчисляются в радианах.
Для пояснения рассмотрим два примера:
1. Пусть 0 20, а 40 (см. рисунок 3.25 а), тогда
вх ((2040)+360) mod 360 340 mod 360 340.
2. Пусть 0 350, а 40 (см. рисунок 3.25 б), тогда
вх ((350+40)+360) mod 360 750 mod 360 7502360 =30.
В рассматриваемом варианте начальных условий поправки Х и Y для расчета координат Хвх, Yвх по рассмотренным выше выражениям (см. формулу 3.6) определяются следующими соотношениями:
Х (cos0 cosвх); Y (sinвх sin0),
где g — ускорение свободного падения.
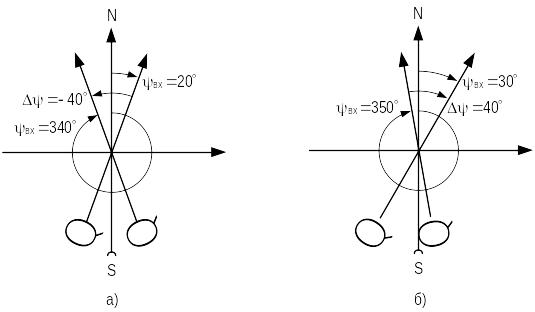
Рисунок 3.25 — Примеры вычисления значений курсовых углов и азимутов направлений
В точке ТВХ с координатами Хвх, Yвх, hвх и курсом вх ВС начинает выполнение разворота в горизонтальной плоскости на высоте hвх с радиусом r и угловой скоростью (см. рисунок 3.23), определяемым по формулам:
r ; ,
где значение r может быть отрицательным, так как tg() tg.
Тогда координаты центров окружностей при правом (ЦRТВХ) и при левом (ЦLТВХ) разворотах в точке ТВХ с учетом знака r определяются следующими соотношениями (см. рисунок 3.26):
X XТВХ r cosвх, Y YТВХ r sinвх;
X XТВХ r cosвх, Y YТВХ r sinвх.
Вход в точку начала снижения с координатами ХТНС, YТНС, hвх осуществляется путем разворота ВС вправо R или влево L с радиусом r и угловой скоростью (см. рисунок 3.23). Координаты центров разворотов ЦRТНС, ЦLТНС в точке ТНС с учетом знака r определяются следующими соотношениями:
X XТВХ r cosп, Y YТВХ r sinп;
X XТВХ r cosп, Y YТВХ r sinп.
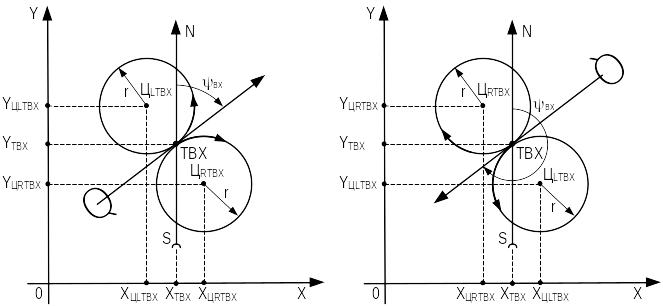

Рисунок 3.26 — Определение координат центров разворотов