

3.1.6.3 Алгоритмы выявления и устранения потенциально конфликтных ситуаций
Для описания алгоритмов обработки сформированных баз данных будем применять алгебраические формулы, записываемые на основе операций реляционной алгебры, имен таблиц и атрибутов [1], а результаты представлять в виде соответствующих результирующих таблиц. Последовательность операций, предписываемая алгебраическими формулами, может выполняться в темпе или после завершения обновления таблиц баз данных. Результирующие таблицы могут входить в состав баз данных или иметь статус рабочих областей. Эти детали реализации не имеют для нашего рассмотрения принципиального значения. Мы хотим только показать возможности технологии СБД по выявлению и устранению ПКС в зафиксированном состоянии информационной модели, отображающей некоторый план полетов воздушных судов по стандартным маршрутам.
Последовательность этапов обработки баз данных, создаваемых в процессе планирования, будем представлять в виде содержательного и формального описания четырех запросов (Z1–Z4) к СБД. Формальные алгебраические описания информационных запросов по существу являются описаниями соответствующих алгоритмов поиска данных.
Z1. Содержательная формулировка запроса.
Для всех стандартных маршрутов (НОМ_СТМ) из таблицы ТМ определить (найти) номера (НОМ_ТМ) и типы (ТИП_ТМ) точек маршрутов, являющихся точками пересечения (ТИП_ТМ = вх_зi или вы_зi) или касания (ТИП_ТМ = зi) границ запретных зон. Результат представить таблицей «Точки маршрутов на границах запретных зон»
ТМГЗ (НОМ_СТМ, НОМ_ТМ, ТИП_ТМ).
Формальная запись запроса в виде алгебраического выражения
ТМГЗ = НОМ_СТМ, НОМ_ТМ, ТИП_ТМ (ТИП_ТМ= вх_ вы_ (ТМ))
предписывает выполнение операции выборки () строк таблицы ТМ, содержащих в столбце ТИП_ТМ одно из начений вх_зi, вы_зi или зi, и оставление в результирующей таблице только трех столбцов из исходной таблицы: НОМ_СТМ, НОМ_ТМ и ТИП_ТМ (операция проекции — ).
СУБД, выполняя эти операции, сформирует предписанную указанной формулой таблицу ТМГЗ (рисунок 3.17) либо во временной рабочей области на период выполнения всей последовательности запросов, либо в составе системы баз данных, обновляя ее синхронно с обновлением таблиц ТМ и ТГЗ. Каждый из этих вариантов реализации имеет свои положительные и отрицательные стороны. Выбор одного из них или разработка какого-либо другого является одним из вопросов проектирования СБД.
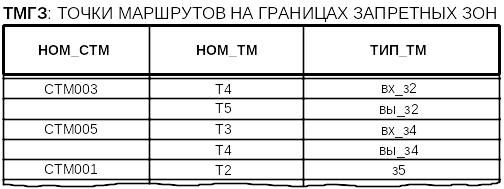
Рисунок 3.17 — Результат операций выборки и проекции над таблицей ТМ
Z2. Содержательная формулировка запроса.
Для всех стандартных маршрутов, имеющих точки пересечения или соприкосновения с запретными зонами (таблица ТМГЗ), найти для каждой такой точки периоды (НОМ_ПЗ) и время (ВРН_З, ВРК_З) закрытия соответствующих зон по всем датам планирования полетов. Результат представить таблицей «Периоды закрытия точек маршрутов на границах запретных зон»
ПЗТМГЗ (НОМ_СТМ, НОМ_ТМ, ТИП_ТМ, НОМ_З, ДТ_З, НОМ_ПЗ, ВРН_З, ВРК_З).
Формальная запись запроса в виде алгебраического выражения
ПЗТМГЗ = ТМГЗ [ТИП_ТМ = (вх_зi вы_зi зi ) & & НОМ_З = зi] РПЗ
предписывает выполнение операции толерантного естественного соединения [4] строк таблицы ТМГЗ, имеющих значением или в окончании значения атрибута ТИП_ТМ символы зi, со строками таблицы РПЗ из базы данных запретных зон, имеющих значением атрибута НОМ_З ту же комбинацию символов зi. Это не простое естественное соединение строк, а соединение по похожести значений (наличию в них общих комбинаций символов).
СУБД, выполняя эти операции, сформирует предписанную указанной формулой таблицу ПЗТМГЗ (рисунок 3.18).
Таким образом, в результате выполнения этих операций для каждой точки пересечения планируемых маршрутов с границами запретных зон устанавливаем соответствие всех их рабочих периодов на все планируемые даты полетов.
Z3. Содержательная формулировка запроса.
Для всех стандартных маршрутов, планируемых для полетов всех экипажей (КВС) воздушных судов, найти время их пролета (ВРПР_Т) точек пересечения (соприкосновения) маршрутов и границ запретных зон. Результат представить таблицей «Время пролета экипажами воздушных судов точек границ запретных зон»
ВРПРТМГЗ (ДТ_П, НОМ_СТМ, КВС, НОМ_ТМ, ВРПР_Т).
Формальная запись запроса в виде алгебраического выражения
ВРПРТМГЗ = ДТ_П, НОМ_СТМ, КВС, НОМ_ТМ, ВРПР_Т(ПРТМ [(НОМ_СТМ, НОМ_ТМ)] ТМГЗ)
предписывает выполнение операции проекции на атрибуты ДТ_П, НОМ_СТМ, КВС, НОМ_ТМ и ВРПР_Т естественного соединения строк таблиц ПРТМ и ТМГЗ по комбинации значений их одноименных атрибутов (НОМ_СТМ, НОМ_ТМ).
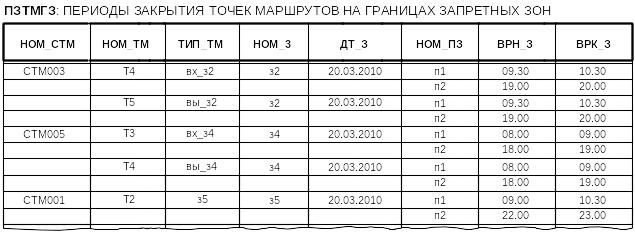
Рисунок 3.18 — Результат толерантного естественного соединения таблиц ТМГЗ и РПЗ
СУБД, выполняя эти операции, сформирует предписанную указанной формулой таблицу ВРПРТМГЗ (рисунок 3.19).
Таким образом, для каждого экипажа, выполняющего полет по заданному маршруту, получаем время пролета точек границ запретных зон или соприкосновения с ними. Эти моменты времени (таблица ВРПРТМГЗ) теперь можно сопоставить с рабочими периодами запретных зон (таблица ПЗТМГЗ) и определить наличие ПКС.

Рисунок 3.19 — Результат проекции естественного соединения таблиц ТМГЗ и ПРТМ по комбинации значений атрибутов (НОМ_СТМ, НОМ_ТМ)
Z4. Содержательная формулировка запроса.
Для всех стандартных маршрутов, планируемых для полетов всех экипажей воздушных судов определить значение признака конфликта (ПРК) в точках пересечения (соприкосновения) маршрутов и границ запретных зон. Результат представить таблицей «Потенциально конфликтные ситуации»
ПКС (ДТ_П, НОМ_СТМ, КВС, НОМ_ТМ, ТИП_ТМ, ВРПР_Т, НОМ_ПЗ, ВРН_З, ВРК_З, ПРК).
Формальная запись запроса в виде алгебраического выражения
ПКС = ДТ_П, НОМ_СТМ, КВС, НОМ_ТМ, ТИП_ТМ, ВРПР_Т, НОМ_ПЗ, ВРН_З, ВРК_З, ПРК (ВРПРТМГЗ [(ДТ_П= ДТ_З, НОМ_СТМ, НОМ_ТМ)] ПЗТМГЗ)
предписывает выполнение операции проекции на атрибуты ДТ_П, НОМ_СТМ, КВС, НОМ_ТМ, ТИП_ТМ, ВРПР_Т, НОМ_ПЗ, ВРН_З, ВРК_З и ПРК естественного соединения строк таблиц ВРПРТМГЗ и ПЗТМГЗ по комбинации значений их одноименных НОМ_СТМ, НОМ_ТМ и разноименных ДТ_П и ДТ_З, но имеющих общий домен «дата», атрибутов.
СУБД, выполняя эти операции, сформирует предписанную указанной формулой таблицу ПКС (рисунок 3.20). Значение атрибута ПРК в этой таблице определяется по рассмотренным ранее соотношениям (3.1 и 3.2) с учетом того, что tвх и tвых определяются комбинациями значений атрибутов (ТИП_ТМ, ВРПР_Т), а tн и tк — значениями атрибутов ВРН_З и ВРК_З соответственно.
Потенциальная конфликтная ситуация для экипажа на некотором маршруте в зоне зi существует, если хотя бы в одной из точек этого маршрута на границе с запретной зоной (входной, выходной или соприкосновения) ПРК = 1 для одного из рабочих периодов этой зоны.