

3.1.4 Определение конфликтных ситуаций на этапах суточного и текущего планирования
Маршрутные таблицы содержащие пространственно‑временные траектории движения заявленных ВС, служат основой для поиска и устранения потенциальных конфликтных ситуаций (ПКС) на этапе суточного планирования, а также для обнаружения и устранения конфликтных ситуаций (КС) на этапе текущего планирования ВД в контролируемом районе (зоне) УВД.
Процедура поиска ПКС между различными ВС, а также между ВС и другими элементами ВП для всех заявленных маршрутов в общем виде состоит в следующей последовательности действий.
1. Из всей совокупности планов отбираются планы, которые имеют пересекающиеся интервалы времени полета.
2. Для отобранных планов выполняется поиск участков их маршрутов, на которых полёты планируются выполнять в одно и тоже время на одной и той же высоте, а также участков с набором и снижением высоты полета ВС;
3. Для этих участков маршрутов выполняется анализ взаимного положения ВС для оценки расстояния сближения между ними;
3.1. Определяются координаты точки пересечения Xп, Yп для i-го и j-го участков пересекающихся маршрутов путем совместного решения уравнений прямых для этих участков Аix Biy Ci=0, Аjx Bjy Cj=0 (рисунок 3.7):
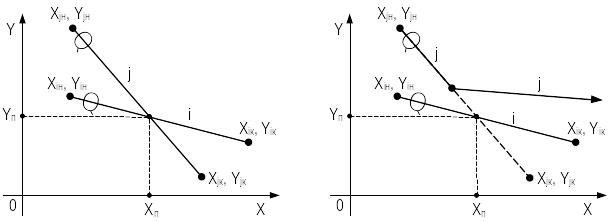
Рисунок 3.7 — Иллюстрация наличия ПКС
где ∆ det AiBj BiAj; ∆x det CiBj BiCj; ∆y det AiCj CiAj.
Значения коэффициентов Ai, Aj, Bi, Bj, Ci, Cj определяются из уравнений прямых, проходящих через две известные точки с координатами (Хн, Yн), (Хк, Yк). Уравнение i-ой прямой, проходящей через точки (Хн,Yн), (Хк,Yк) записывается в виде
,
отсюда
(y Yiн)(Xiк Xiн) (x Xiн)(Yiк Yiн),
или
x(Yiн Yiк) y(Xiк Xiн) Xiн(Yiк Yiн) Yiн(Xiн Xiк) 0.
Тогда коэффициенты для i-ой и аналогично для j-ой прямых определяются следующими соотношениями:
Аi Yiн Yiк; Аj YjнYjк;
Вi Хiк Хiн; Вj Хjк-Хjн;
Сi ХiнYiк –ХiкYiн; Сj ХjнYjк –ХjкYjн.
Знание координат Xп, Yп позволяет установить факт пересечения двух участков анализируемых маршрутов по выполнению условий:
и .
3.2. Если в точке пересечения Xп, Yп разность времен прибытия ВСi и ВСj равна или превышает ∆tдоп 15 минут (см.п.1.5), то ПКС отсутствует. Иначе ПКС существует и необходимо выполнить коррекцию плана полета одного из ВС по времени или эшелону на соответствующем участке его маршрута.
Если в точке пересечения маршрутов одно из ВС меняет эшелон, то необходимо провести проверку наличия вертикального и горизонтального расстояния между ВС (рисунок 3.8).

Рисунок 3.8 — Определение ПКС при смене эшелонов полета ВС
Для уточнения и разрешения ПКС требуется дополнительный расчёт времени прохождения точки конфликта воздушными судами, который выполняется на основе информации, содержащейся в маршрутных таблицах.
Для недопущения перехода ПКС в конфликтную ситуацию производится оценка величины временного или линейного удаления.
Найдём расстояния di и dj от начальных точек участков маршрутов ВСi и ВСj до точки пересечения Xп,Yп, а также расстояние d между начальными точками участков маршрутов двух ВС и разность их высот ΔН в точке пересечения участков маршрутов, если ВС на этих участках меняют эшелоны полета (рисунок 3.9):
;
;
;
ΔН Нi Нj.
Угол пересечения участков маршрутов (для дополнительных расчетов) находится по теореме косинусов:
d2 d d 2didj cos ; cos ; arccos .
Найдем время пролёта точки пересечения ВСi и ВСj:
tпi tiн ; tпj tjн ,
где tiн, tjн — времена пролета по плану начальных точек участков маршрутов ВСi и ВСj.

Рисунок 3.9 — Исходные данные для анализа ПКС
Если ∆t |tпi tпj| ≥ ∆tдоп — то ПКС между ВСi и ВСj на этих участках маршрутов не существует. При ∆t |tпi tпj| < ∆tдоп существует ПКС и её необходимо устранить путём задержки момента пролёта ВСi или ВСj начальных точек своих участков маршрутов на время ∆tзад ≥ ∆tдоп – ∆t.
При отсутствии приоритетов, как правило, задерживается то ВС, которое должно по плану проходить точку пересечения участков маршрутов позже. При изменении эшелонов на участках имеющих пересечение, должно выполняться условие: Δt |Нi Нj| ≥ Нбез.
Найденные значения d и могут также использоваться для расчета временны;'х и линейных удалений одного из ВС от точки пересечения в момент её пролёта другим ВС.
3.3. Каждый участок i-го маршрута, выбранного за опорный, проверяется со всеми участками j-ых маршрутов.
4. Аналогичным образом определяются координаты точек пересечения Xп , Yп участков маршрутов, заданных координатами маршрутных точек МТi и воздушных трасс, заданных координатами ПОД, а также точки пересечения участков маршрутов с границами запретных зон (ЗЗ), которые в плане задаются координатами точек изломов своих границ ТГj, j 1, 2, …, n (рисунок 3.10).
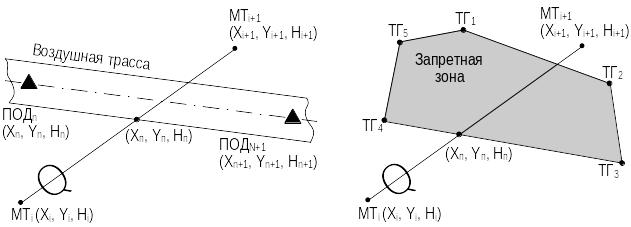
Рисунок 3.10 — Пересечение заявочных маршрутов с элементами ВП и определение параметров пересечения