

3.1.1 Существо процессов обработки заявок на полеты воздушных судов
Получаемые центрами ЕС ОрВД формализованные заявки-планы на полеты ВС в виде телеграфных сообщений автоматически или вручную вводятся операторами с АРМ в ЭВМ, где производится форматно-логический контроль заявки на правильность заполнения полей и наличие в базе данных объектов, идентификаторы и параметры которых указаны в заявке: аэродромов, маршрутных точек, районов, воздушных трасс, типов ВС и другие. После контроля и исправления полученные данные заявок используются для планирования воздушного движения. Процесс планирования начинается с расчета маршрутов полетов ВС и формирования их пространственно-временных траекторий (ПВТ) в ВП центров ЕС ОрВД, используемых как для суточного, так и для текущего планирования.
Расчет маршрута полета состоит в анализе маршрутной части заявки и определении (расчете) времени пролета каждым ВС каждой маршрутной точки (МТ), указанной в заявленном маршруте с учетом равномерного движения ВС по ортодромии между начальной и конечной точками i-го участка маршрута (МТi1 и МТi) с крейсерской скоростью Vкр, а также с учетом возможных изменений эшелона и скорости полета на участке маршрута:
Ti+1 = Ti + ,
где i=1,2,3,…n; Ti — время пролета воздушным судном МТi; Ti+1 — время пролета МТi+1; Vкр — крейсерская скорость ВС на участке; Si+1 — длина ортодромного участка [в км] в гринвичской системе координат; —угловое расстояние между МТi и МТi+1 [рад, град]; (i, i), (i+1, i+1) — широта и долгота МТн и МТк [в градусах]; RЗ ≈ 6371км — радиус Земли.
Схема определения времен пролета маршрутных точек представлена на рисунке 3.1.
xi = RЗ cos i cos i = RЗ k11, k11 = cos i cos i;
yi = RЗ cos i sin i = RЗ k12, k12 = cos i sin i;
zi = RЗ sin i = RЗ k13, k13 = sin i;
xi+1 = RЗ cos i+1 cos i+1 = RЗ k21, k21 = cos i+1 cos i+1;
yi+1 = RЗ cos i+1 sin i+1 = RЗ k22, k22 = cos i+1 sin i+1;
zi+1 = RЗ sin к = RЗ k23, k23 = sin i+1;
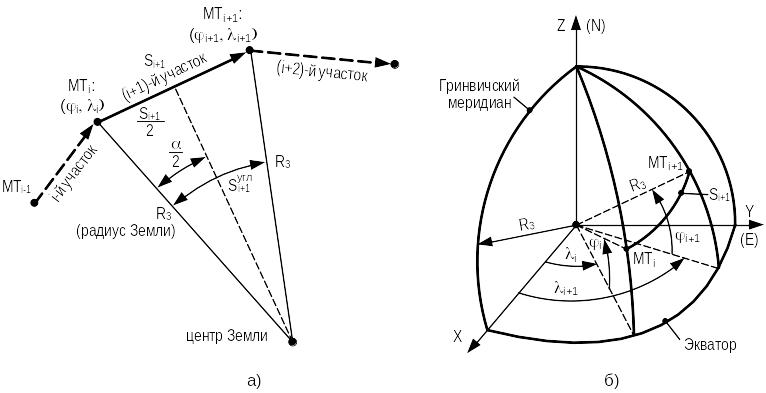
Рисунок 3.1 — Схема определения длины ортодромии
Длина (i+1)-ого ортодромического участка Si+1 (длина основания равнобедренного треугольника в километрах), в котором сторонами являются радиусы Земли RЗ, а угол между радиусами (в радианах) равен = , в гринвичской системе координат находится следующим образом:
.
Так как , то угловое расстояние между МТi и МТi+1 (в радианах) будет равно:
,
а длина соответствующего ортодромического участка (в километрах):
≈ RЗ .
Таким образом, время пролета (i+1)-ой маршрутной точки будет определятся соотношением:
.
Полученное расчетное время сравнивается с заявочным временем . Если для каждого участка маршрута
| – | ≤ 2 мин,
то заявка принимается к дальнейшей обработке; если же хотя бы для одного участка данное соотношение не выполняется, — то такая заявка не принимается и требует пересчета плана заявляемого полета ВС.
Для нахождения длины ортодромии (i+1)-го участка маршрута Si+1, выраженной в км, воспользуемся формулами сферической геометрии:
,
где — сторона угла в градусах, или длина пути по ортодромии в градусах;
Si+1 111,12 ,
где 111,12 — длина пути (в километрах) по ортодромии с углом в 1 градус.
Таким образом проверяются времена пролета всех маршрутных точек для всех заявленных полетов ВС.
Для расчета пространственно-временных траекторий полетов ВС и определения потенциальных конфликтных ситуаций производится пересчет координат маршрутных точек из географической системы координат (, ) в координаты условно‑прямоугольной системы координат «x, y, z», в которой ось 0Y направлена вдоль нулевого (гринвичского) меридиана на север, а ось 0X — по экватору на восток от пересечения с нулевым меридианом.
Географическая и условно‑прямоугольная системы координат связаны соотношениями:
Поскольку значения и маршрутных точек в заявках указываются в угловых градусах и минутах (например, «широта º градусов и ' минут»), то перевод их в радианную меру производится по формулам:
где ≈ 2,909104.
Прямоугольные координаты маршрутных точек (xi, yi, hi), время их пролета ti и скорость пролета записываются в таблицу маршрутов и используются для расчета ПКС между ВС, между маршрутами ВС и ВТ, между ВС и запретными зонами (ЗЗ).
Различные заявленные полеты по одному и тому же маршруту упрощенно можно представить в виде таблицы 3.1.
Т а б л и ц а 3.1
№№ полетов |
Маршрутные точки |
|||
МТ1 |
МТ2 |
… |
МТn |
|
№1 |
x11,y11,h11,t11, |
x21,y21,h21,t21, |
… … … |
x1n,y1n,h1n,t1n, |
№2 |
x21,y21,h21,t21, |
x22,y22,h22,t22, |
… … … |
x2n,y2n,h2n,t2n, |
… |
…………….. |
…………….. |
… … … |
…………….. |
№m |
xm1,ym1,hm1,tm1, |
x2m,y2m,h2m,t2m, |
… … … |
xmn,ymn,hmn,tmn, |
Количество таких таблиц в каждом центре управления ВД будет равно числу обслуживаемых этим центром маршрутов. Совокупность таких таблиц по всем маршрутам содержит основную информацию о пространственно-временных траекториях всех полетов ВС в ВП района УВД (зоны УВД) и используется для решения задач суточного и текущего планирования ВД.
На картах маршруты полетов показываются схемами, которые также используется для суточного и текущего планирования ВД (рисунок 3.2).
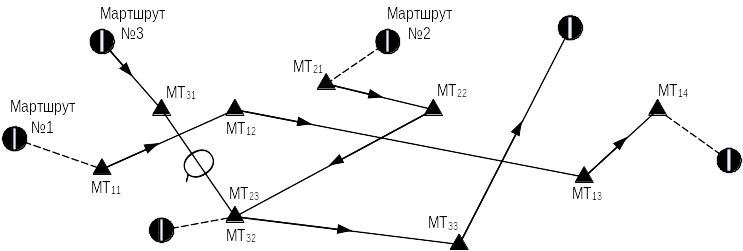
Рисунок 3.2 — Примерный вид фрагмента схемы маршрутов
Выполняемые на этом этапе расчеты являются основой для формирования баз данных, играющих роль информационных моделей практически всех процессов УВД. Принципы использования баз данных для решения задач устранения ПКС будут рассмотрены далее.