

Решение

Относительно поверхности земли точки обода маховичка совершают сложное движение. За переносное движение принимаем движение автомобиля, за относительное — вращательное движение маховичка относительно неподвижной оси
![]()
Очевидно, что
![]()
В относительном движении точка движется по окружности г = 0,25 м и ее ускорение вычисляется по формуле
![]()
На рис. 1.50, б показаны составляющие ускорения точки обода маховичка в относительном движении, а также вектор а,
Так как а, и ае взаимно перпендикулярны, то
![]()
Вектор а показан на рис. 1.50, б.
Плоскопараллельное движение тела
Пример 6. Зубчатое колесо зажато между двумя параллельными зубчатыми рейками (рис. 1.51, а). Нижняя рейка неподвижна, верхняя — движется со скоростью v = 4 м/с. Определить скорость точки В.
Решение
К олесо
совершает плоскопараллельное движение.
Как известно, плоскопараллельное
движение можно представить как сумму
двух движении: поступательного вместе
с осью О и вращательного вокруг той
же оси.
олесо
совершает плоскопараллельное движение.
Как известно, плоскопараллельное
движение можно представить как сумму
двух движении: поступательного вместе
с осью О и вращательного вокруг той
же оси.
Тогда скорость точки В можно рассматривать как геометрическую сумму скоростей в поступательном (переносном) и во вращательном (относительном) движениях (рис. 1.51, б):
![]()
где
![]()
Как известно, угловая скорость относительного вращательного движения не зависит от выбора полюса, поэтому, приняв за полюс точку Р (рис. 1.51, б), найдем
![]()
С корость
точки А — общей точки колеса и рейки vA
= 4 м/с. Очевидно,
корость
точки А — общей точки колеса и рейки vA
= 4 м/с. Очевидно,
Модуль скорости точки В
![]()
Решим пример другим способом. Движение колеса можно рассматривать в любой момент времени как вращательное вокруг мгновенного центра вращения. В рассматриваемом примере мгновенный центр вращения колеса — точки касания колеса с неподвижной рейкой (точка Р).
Скорость точки А можно определить как скорость во вращательном движении вокруг точки Р:
![]()
откуда
![]()
т. е.
![]()
Тогда
![]()
П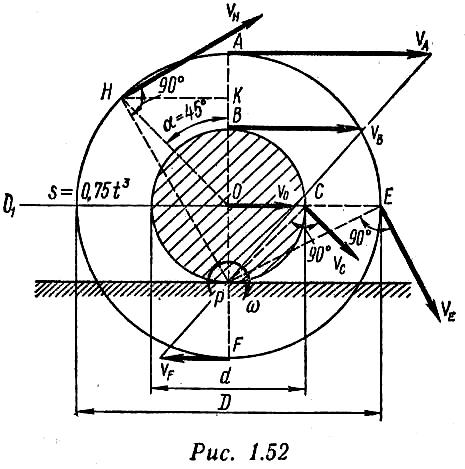 ример
7. Цилиндр с выступающим ободом катится
без скольжения по горизонтальной
поверхности (рис. 1.52). При этом центр
цилиндра — точка О движется прямолинейно
от начального положения Ох согласно
уравнению s = 0,75t3
(s — в метрах, t
— в секундах). Определить скорости
точек В и С цилиндра, а также точек
А, Е, F и Н,
лежащих на ободе цилиндра в момент
времени t =
2 с. Диаметр цилиндра d
= 1 м, обода D = 1,8 м.
ример
7. Цилиндр с выступающим ободом катится
без скольжения по горизонтальной
поверхности (рис. 1.52). При этом центр
цилиндра — точка О движется прямолинейно
от начального положения Ох согласно
уравнению s = 0,75t3
(s — в метрах, t
— в секундах). Определить скорости
точек В и С цилиндра, а также точек
А, Е, F и Н,
лежащих на ободе цилиндра в момент
времени t =
2 с. Диаметр цилиндра d
= 1 м, обода D = 1,8 м.
Решение
По заданному закону движения точки О определяем ее скорость в момент времени t = 2 с:
![]()
при t = 2 с v0 = 9 м/с.
Цилиндр совершает плоскопараллельное движение. Мгновенный центр вращения находится в точке Р. Поэтому
![]()
Отсюда мгновенная угловая скорость вращения цилиндра
![]()
Найдем расстояния от мгновенного центра скоростей Р до заданных точек:
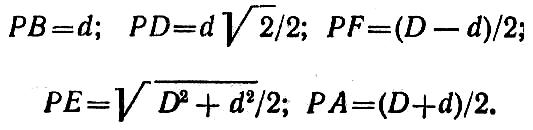
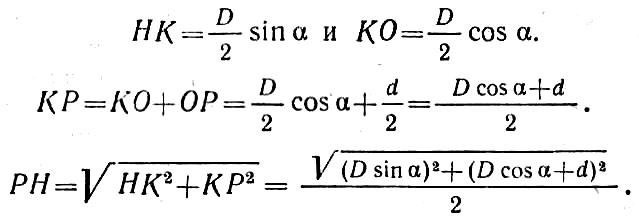
Для определения расстояния РН рассмотрим прямоугольные треугольники НКО и РКН. Из
треугольника НКО имеем
Теперь определим величины скоростей заданных точек:


Вектора скоростей показаны на рис. 1.52.
Пример 8. В механизме грохота (рис. 1.53, а) кривошипы O1А и O2В связаны звеном АВ. Размеры всех звеньев одинаковы: O1А = O2В = АВ = 40 см. Кривошип O1A равномерно вращается вокруг оси Ох с частотой по = 60 об/мин.
Определить угловую скорость звена АВ и скорость точки В для двух положений грохота:
1) когда кривошип O1A занимает горизонтальное положение,
2) когда кривошип O2В занимает горизонтальное положение.