

2. Дистанционный индуктивный манометр (дим)
Недостатки потенциометрических преобразователей, связанные с износом потенциометра, нарушением контактов при вибрациях, колебаниях измеряемого давления и переменных температурах, привели к созданию манометров с индуктивными преобразователями.
Они применяются
для измерения давления в условиях
повышенных температур и при
значительных пульсациях измеряемого
давления с частотой до
 .
.
Манометры
изготавливают с диапазоном 'измерения
от
 до
до
 В комплект прибора входят датчик,
указатель и соединительные провода.
Принцип действия подробно изложен в
работе [4].
В комплект прибора входят датчик,
указатель и соединительные провода.
Принцип действия подробно изложен в
работе [4].
Расчет датчика индуктивного манометра
Для расчета электрических параметров датчика необходимо найти индуктивности его катушек, которые определяют через проводимости воздушных зазоров. Точное определение последних представляет большие трудности ввиду трехмерности электромагнитного поля.
Расчет произведем аналитическим методом, как наиболее подходящим в данном случае.
Для этого магнитное поле в воздушном зазоре и краевое поле выпучивания разбивают на простые фигуры, предварительно находя все геометрические размеры и связывая величины воздушных зазоров с величиной перемещения якоря X.

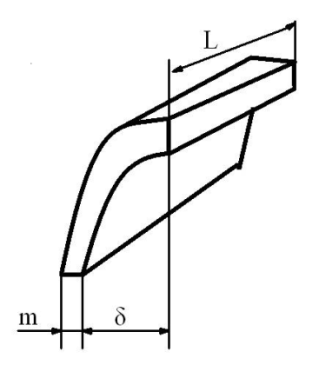
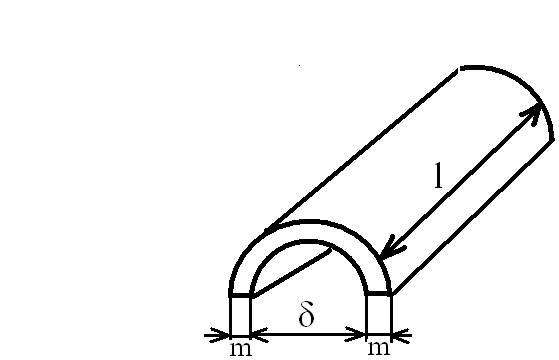
Форма и размеры
одного из сердечников магнитной системы
показаны на рис. 2.13 и 2.14. Величина
перемещения якоря X
считается заданной X
= 0÷0,6 мм и
определяется деформацией мембраны.
Воздушный зазор
между нижним сердечником и якорем
при X = 0 (Р =
0) может
браться равным 0,15
мм.
Верхний сердечник расположим на таком
расстоянии, чтобы при X
= 0,6 мм зазор
 между ним и якорем был равен также 0,15
мм.
между ним и якорем был равен также 0,15
мм.
При данной конструкции и размерах магнитной системы, чтобы площадь воздушного зазора между якорем и сердечниками оставалась постоянной, верхний сердечник необходимо поднять на высоту 0,6 мм относительно уровня нижнего сердечника.
Задаваясь значениями
X
от Х=0
до Х=0,6 мм,
определяем значения
и
 .
Как видно из рис. 2.14,
и
связаны
с Х
соотношением
.
Как видно из рис. 2.14,
и
связаны
с Х
соотношением

Для X=0
 , где
берут равным 45°.
, где
берут равным 45°.
Так как сердечники имеют одинаковую конструкцию и размеры, достаточно определить проводимости воздушных зазоров между одним из сердечников и якорем. Данные для второго сердечника получаются на основании расчета первого магнитопровода.
Магнитный поток проходит не только через воздушный зазор между сердечником и якорем, но и вблизи него, и занимает сложную форму. Объем, по которому замыкается магнитный поток, разбивается на отдельные фигуры, вычисляются их проводимости в отдельности, а затем складываются.
Проводимость воздушного зазора под средним стержнем
сердечника:
1. Без учета потоков выпучивания

где
 – магнитная проницаемость воздуха.
– магнитная проницаемость воздуха.
Дополнительные проводимости, обусловленные потоками выпучивания, определяются по эмпирическим формулам (см. табл. 2.2).
Суммарная проводимость среднего сердечника определится как сумма всех найденных проводимостей

Аналогично находим проводимость воздушного зазора под крайним сердечником.
Проводимость потоков рассеивания определяется по формуле

где
 – внутренняя боковая поверхность
среднего стержня, занимаемого
катушкой.
– внутренняя боковая поверхность
среднего стержня, занимаемого
катушкой.
Для определения суммарной магнитной проводимости всей цепи воспользуемся схемой замещения (рис. 2.15),
где
 – проводимость воздушного зазора;
– проводимость воздушного зазора;
 – проводимость
железа;
– проводимость
железа;
 – источник
намагничивающей силы;
– источник
намагничивающей силы;
G – магнитная проводимость.
При построении схемы замещения и при расчете величиной магнитного сопротивления стали можно пренебречь, она очень мала по сравнению с сопротивлением воздушного зазора G. Так как длина воздушного зазора у всех стержней сердечников одинакова, а проводимости воздушных зазоров крайних стержней равны, то схема рис. 2.15 симметрична относительно точек а и б и ее можно привести к виду рис. 2.16, а, б.
Проводимость по этой схеме будет равна

Таблица 2.2
Формулы для вычисления проводимостей воздушных путей
|
Проводимость , гн;
|
|
Четверть цилиндра
|
|
Четверть полого цилиндра
|
|
Половина цилиндра
|
|
Половина полого периода
|
|
Шаровой квадрант
|
|
Квадрант шаровой оболочки
|











С учетом потоков утечки схема замещения приводится к схеме рис. 2.16, в и проводимость ее будет равна

Вычисленные проводимости магнитной системы при различных значениях воздушного зазора, индуктивности и сопротивления катушек сводятся в табл. 2.3.
Индуктивность катушек датчика определяется по формуле

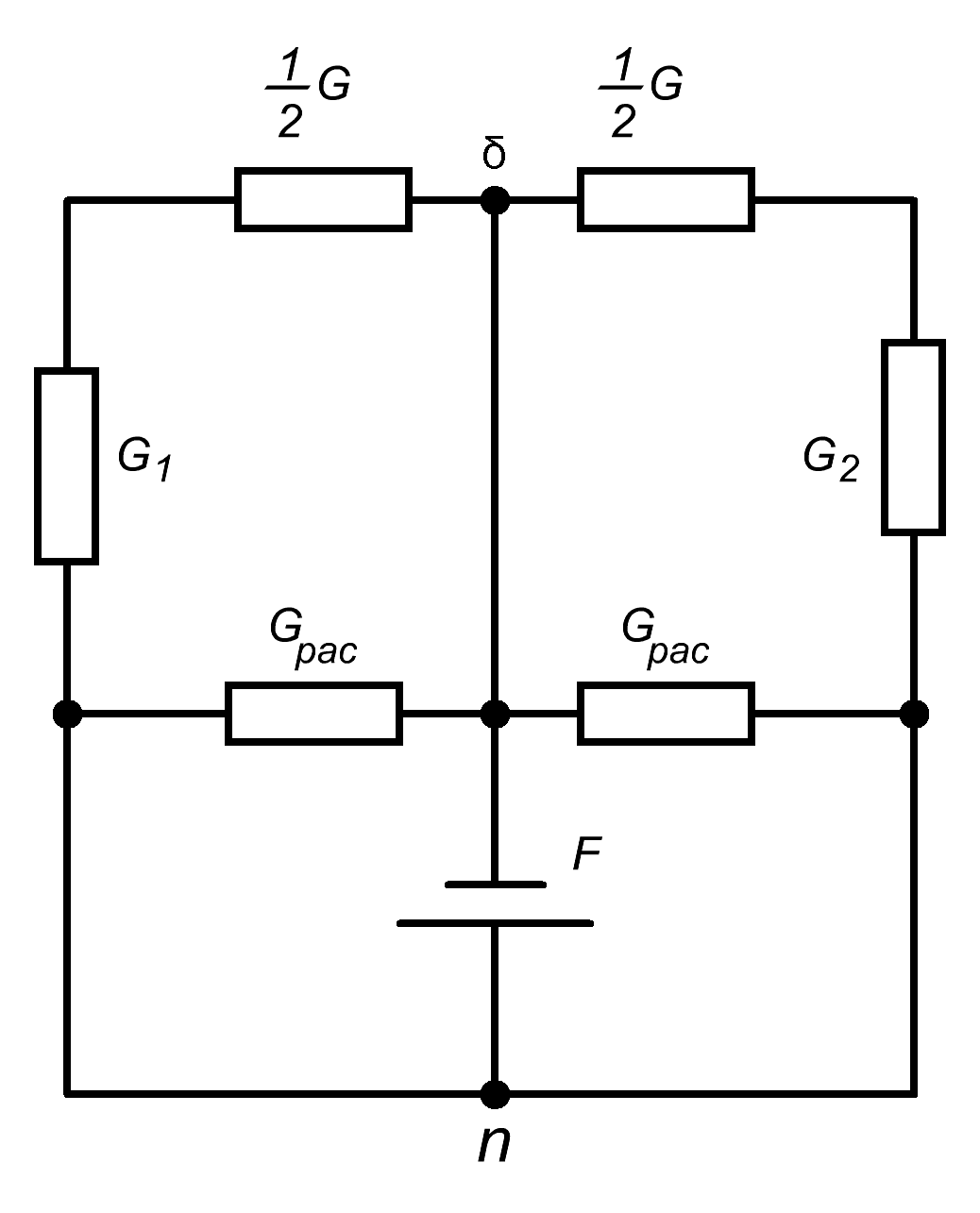
Рис. 2.15 Схема замещения магнитной цепи

Рис. 2.16 Схема замещения воздушным зазорам.
где
 – в м;
– в м2;
– в м;
– в м2;
 гн/м.
гн/м.
В приведенной формуле
 – магнитное
сопротивление стали, которым можно
пренебречь, так как
– магнитное
сопротивление стали, которым можно
пренебречь, так как

 – магнитное
сопротивление воздушного зазора.
– магнитное
сопротивление воздушного зазора.
Так как
 то формула индуктивности имеет вид
то формула индуктивности имеет вид

Число витков катушек датчика обычно выбирается равным 200—1500 при диаметре провода без изоляции 0,12÷0,15 мм.
По полученным значениям индуктивности можно найти реактивные сопротивления катушек как функцию величины перемещения якоря X

Активное сопротивление (без вносимых активных потерь) обмотки датчика может быть найдено по формуле

где
 – средняя длина витка обмотки (находится
по геометрическим размерам катушки).
– средняя длина витка обмотки (находится
по геометрическим размерам катушки).
По данным табл.
2.3 строят графики

Таблица 2.3
Х, мм |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
δХ, мм |
|
|
|
|
|
|
|
δ1 мм |
|
|
|
|
|
|
|
δ2 мм |
|
|
|
|
|
|
|
G1, см |
|
|
|
|
|
|
|
G2, см |
|
|
|
|
|
|
|
L1, гн |
|
|
|
|
|
|
|
L2, гн |
|
|
|
|
|
|
|
ХL1, ом |
|
|
|
|
|
|
|
ХL2, ом |
|
|
|
|
|
|
|
Зная индуктивные сопротивления плеч моста ДИМ, можно получить значения токов в рамках указателя ДИМ, собранного по схеме ЭДМУ.
Так как для работы магнитоэлектрического логометра необходим постоянный ток, то в цепи датчика устанавливают диоды, которые обеспечивают однополупериодное выпрямление переменного тока. При этом действующее значение выпрямленного тока в каждом плече определится значением

где


При символическом методе расчета величины токов в рамках могут быть получены по аналогии с мостовой схемой ЭДМУ.
Расчет указателя индуктивного манометра производится так же, как и расчет ЭДМУ.