

Задание 4
В качестве объекта управления примем быстроходный патрульный катер, управляемый с помощью вертикальных рулей направления и специальных щитков – интерцепторов, выдвигающихся из днища судна и создающих управляющий момент по крену.
Б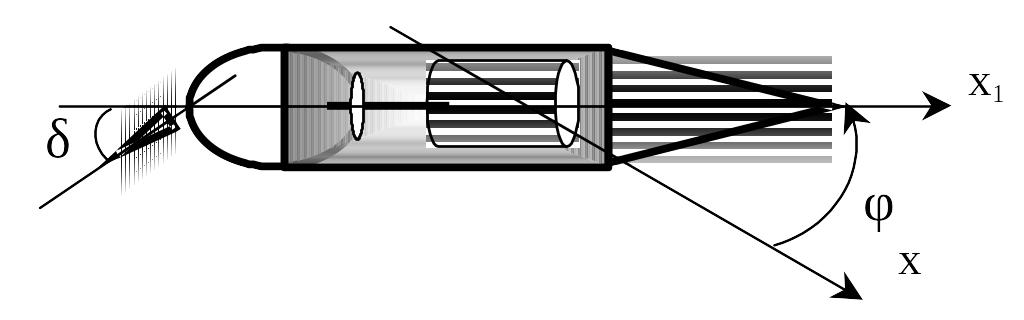 удем
рассматривать процесс стабилизации
катера в боковом движении по рысканию
и крену на постоянной скорости хода
удем
рассматривать процесс стабилизации
катера в боковом движении по рысканию
и крену на постоянной скорости хода
![]() м/с
с помощью отклонения рулей направления
на угол
м/с
с помощью отклонения рулей направления
на угол
![]() и с помощью разностного выдвига
и с помощью разностного выдвига
![]() внешних секций кормовых интерцепторов
(рис. 2.5.4).
внешних секций кормовых интерцепторов
(рис. 2.5.4).
Рис. 2.5.4.
Будем описывать процесс стабилизации с помощью следующей системы линейных дифференциальных уравнений:
![]() ,
,
![]()

Здесь
![]() – угол дрейфа,
– угловая скорость по рысканию,
– угловая скорость по крену,
– угол рыскания,
– угол крена;
– угол дрейфа,
– угловая скорость по рысканию,
– угловая скорость по крену,
– угол рыскания,
– угол крена;
![]() ,
,
![]() и
и
![]() – внешние возмущения.
– внешние возмущения.
Необходимо выполнить следующие действия:
Сформировать LTI-объект, соответствующий данной модели. Входом считать вектор
 с компонентами
,
,
,
и
.
Выходом – вектор
с компонентами
,
,
,
и
.
Выходом – вектор
 с компонентами
и
.
с компонентами
и
.Найти передаточные функции от входа к выходу и от входа к выходу . Построить диаграммы Боде для этих функций и найти частоты, на которой их амплитудные части достигают локального максимума.
Задание 5
Р ассмотрим
движение корабля в горизонтальной
плоскости (рис. 2.5.5), который управляется
с помощью вертикального руля направления.
Будем учитывать инерционность привода
рулей. В качестве математической модели
процесса стабилизации на заданном курсе
примем систему обыкновенных линейных
дифференциальных уравнений вида (2.5.2).
Здесь
– угол дрейфа,
– угловая скорость по рысканию,
– угол рыскания.
ассмотрим
движение корабля в горизонтальной
плоскости (рис. 2.5.5), который управляется
с помощью вертикального руля направления.
Будем учитывать инерционность привода
рулей. В качестве математической модели
процесса стабилизации на заданном курсе
примем систему обыкновенных линейных
дифференциальных уравнений вида (2.5.2).
Здесь
– угол дрейфа,
– угловая скорость по рысканию,
– угол рыскания.
Рис. 2.5.5.
 (2.5.2)
(2.5.2)
Здесь через
обозначено отклонение руля, а через
![]() – управляющий сигнал. Примем следующие
величины числовых значений параметров
модели (2.5.2), которые соответствуют
кораблю водоизмещением 3000 т, идущим с
постоянной скоростью 10 м/с:
– управляющий сигнал. Примем следующие
величины числовых значений параметров
модели (2.5.2), которые соответствуют
кораблю водоизмещением 3000 т, идущим с
постоянной скоростью 10 м/с:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Необходимо выполнить следующие действия:
Сформировать управление в виде
![]() .
(2.5.3)
.
(2.5.3)
Аналитически (формулой) найти такую
величину постоянного командного сигнала
,
который обеспечит для замкнутой системы
(2.5.1), (2.5.2) равенство
![]() ,
где
,
где
![]() – заданное число.
– заданное число.
Задать коэффициенты закона управления
 ,
,
 ,
,
 ,
,
 и сформировать LTI-объект,
соответствующий математической модели
замкнутой системы, причем его входом
считать переменную
и сформировать LTI-объект,
соответствующий математической модели
замкнутой системы, причем его входом
считать переменную
 ,
а выходом – переменную
.
,
а выходом – переменную
.Найти передаточную функцию полученного объекта от входа к выходу.
Задание 6
В качестве объекта управления примем вертолет, движущийся в вертикальной плоскости. Управление движением осуществляется с помощью наклона плоскости несущего винта на угол .
Д ля
динамических параметров движения примем
следующие обозначения:
– угол тангажа,
ля
динамических параметров движения примем
следующие обозначения:
– угол тангажа,
![]() – перемещение в горизонтальном
направлении. Задача системы стабилизации
– удержать машину в заданном положении
при воздействии внешних возмущений.
– перемещение в горизонтальном
направлении. Задача системы стабилизации
– удержать машину в заданном положении
при воздействии внешних возмущений.
Рис. 2.5.6.
В качестве математической модели процесса стабилизации примем следующую систему обыкновенных дифференциальных уравнений:
 (2.5.4)
(2.5.4)
где
![]() ,
,
![]() ,
,![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
При этом
измеряется в радианах, а
– в метрах.
.
При этом
измеряется в радианах, а
– в метрах.
Необходимо выполнить следующие действия:
Сформировать LTI-объект, соответствующий данной модели. Входом считать переменную , а выходом – вектор с компонентами и .
Найти передаточные функции от входа к выходным переменным. Построить диаграммы Боде для этих функций.