

2.2 Графічна частина
Графічна частина РР виконується на ПЕОМ в одному з графічних редакторів згідно з вимогами ЕСКД і складається з 1-2 аркушів формату А4. Після погодження форми та змісту креслень і підписання їх керівником вони розміщується у додатку до РР.
Конкретний зміст графічної частини зазначається у завданні на РР, що видається студенту керівником.
3. Розрахункова робота
3.1. Завдання 1 - Визначення точності вимірювань
Запис результату безпосереднього вимірювання (вибір варіанту – за останньою цифрою персонального шифру студента). При опосередкованому вимірюванні величини одержано результати прямих вимірювань (X, V, Z). Формулу зв'язку подано у табл. 3.1
Таблиця 3.1 – варіанти завдань.
Номер Варіанту |
X |
Y |
Z |
Формула зв’язку |
0 |
5,0 |
10,0 0,1 |
10,0 0,2 |
E=40XYZ |
1 |
3,0 0,1 |
5,0 0,5 |
10,0 0,2 |
E=X3 |
2 |
4,0 0,2 |
5,0 0,5 |
10,0 0,2 |
E=30X2Z |
3 |
4,0 0,4 |
5,0 0,5 |
10,0 0,2 |
E=3XY |
4 |
4,0 0,2 |
3,0 0,1 |
10,0 0,2 |
E=5X2/Y |
5 |
8,0 0,4 |
3,0 0,3 |
10,0 0,2 |
E=XY1/2 |
6 |
2,0 0,1 |
10,0 0,1 |
10,0 0,2 |
E=0.5X2Y |
7 |
20,0 0,1 |
10,0 1 |
10,0 0,2 |
E=X/Y |
8 |
1,0 0,03 |
1,0 0,04 |
10,0 0,2 |
E=XY |
9 |
3,0 0,1 |
5,0 0,5 |
10,0 0,2 |
E=2X3 |
10 |
5,0 0,1 |
10,0 0,1 |
10,0 0,2 |
E=10XZ2 |
11 |
3,0 0,1 |
5,0 0,5 |
10,0 0,2 |
E=4YX3 |
12 |
4,0 0,2 |
5,0 0,5 |
10,0 0,2 |
E=20X2Z |
13 |
4,0 0,4 |
5,0 0,5 |
10,0 0,2 |
E=4XYZ |
14 |
4,0 0,2 |
3,0 0,1 |
10,0 0,2 |
E=6X2/Z |
15 |
8,0 0,4 |
3,0 0,3 |
10,0 0,2 |
E=XZY1/2 |
16 |
2,0 0,1 |
10,0 0,1 |
10,0 0,2 |
E=0.5X2Z |
17 |
20,0 0,1 |
10,0 1 |
10,0 0,2 |
E=4X/Z |
18 |
1,0 0,03 |
1,0 0,04 |
10,0 0,2 |
E=XYZ |
19 |
3,0 0,1 |
5,0 0,5 |
10,0 0,2 |
E=2X3Z |
Приклад рішення задачі:
Записати результат вимірювання, якщо E=XY; X=3,0 0,1; Y=2,0 0,2, то АЕ=3*2=6
![]()
тоді Е=6,0 0,8
3.2. Завдання 2 - Аналіз принципових схем систем дистанційного вимірювання технологічних параметрів або автоматичної сигналізації
Проаналізувати принципову схему (вибір варіанта—за останньою цифрою персональною шифру студента); побудувати відповідну функціональну схему за ГОСТ 21.404—85 (табл. 3.2).
Таблиця 3.2.
Варіант |
Призначення системи |
Рисунок |
0
1
2
3
4
5
6
7
8
9
|
Дистанційного результатів зміни зусилля з реєстрацією результатів Дистанційного вимірювання кута повороту вала технологічно машини Дистанційного вимірювання витрат рідини в трубопроводі Дистанційного тиску газу в технологічній місткості Дистанційного вимірювання тиску газу в технологічній місткості Дистанційного вимінювання температури в камері М Вимірювання тиску та витрат рідини, що подається до технологічної міскості Автоматичної сигналізації відхилення рівня рідини в резервуарі від норми Автоматичної сигналізації відхилення від норми тиску газу в технологічній місткості Автоматичної сигналізації температури у камері М |
3.1
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
3.10 |
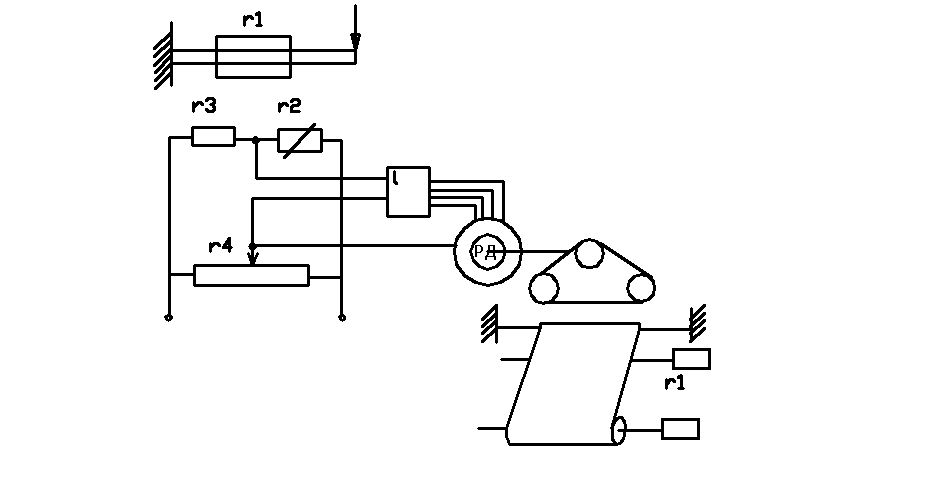
Рис.3.1
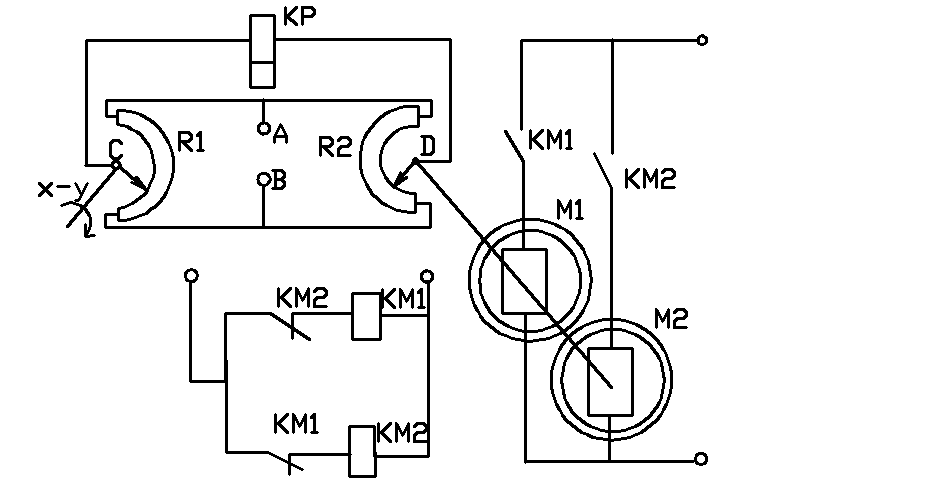
Рис.3.2
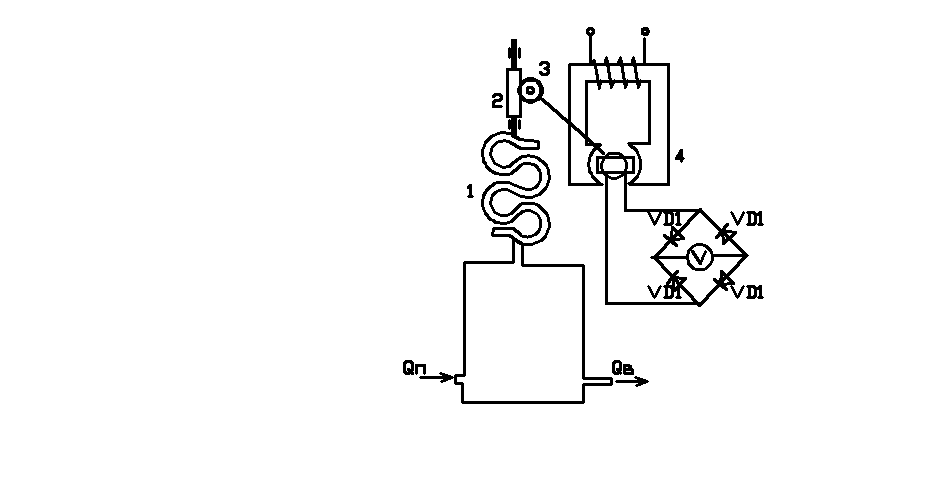
Рис.3.3
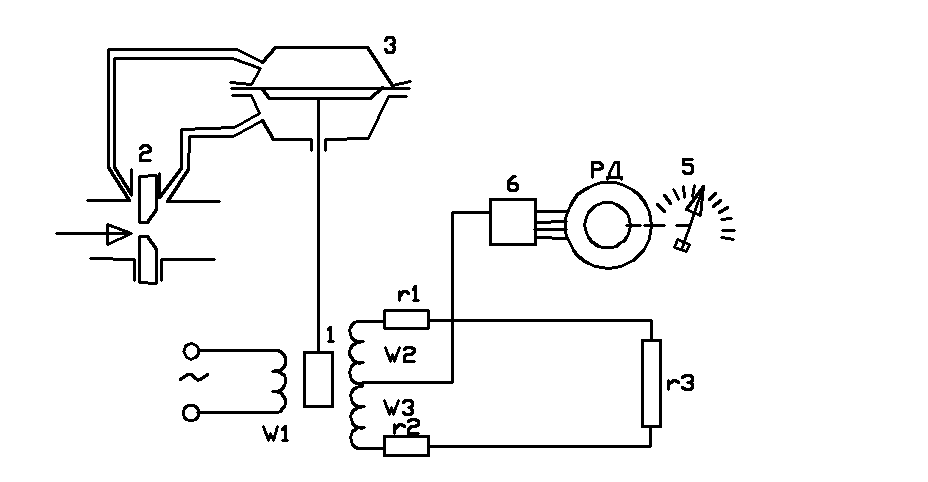
Рис.3.4
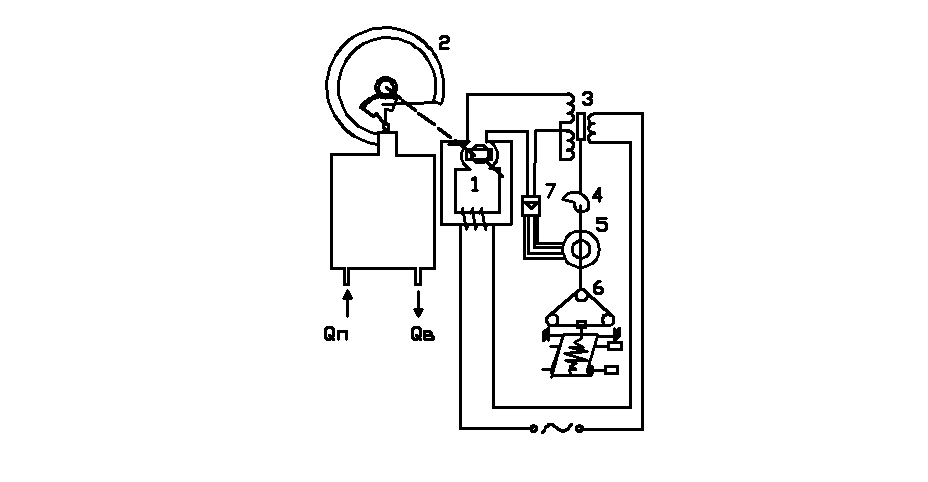
Рис.3.5
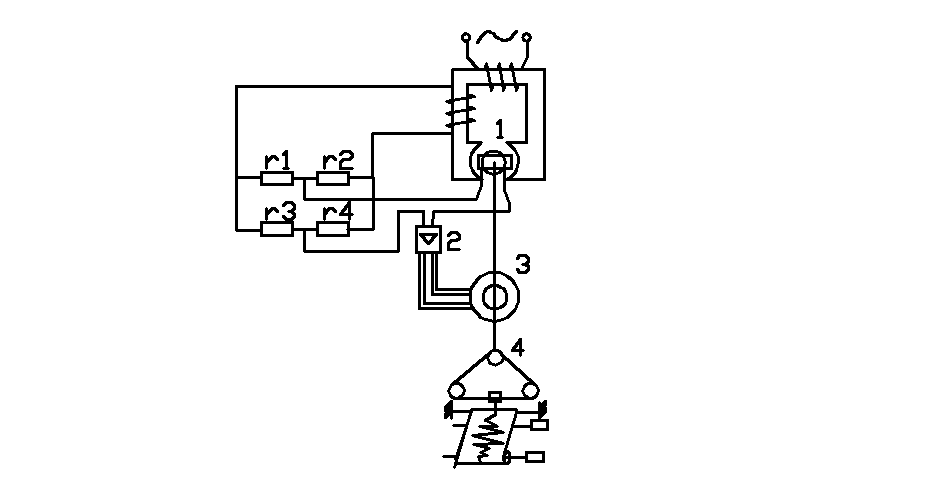
Рис.3.6
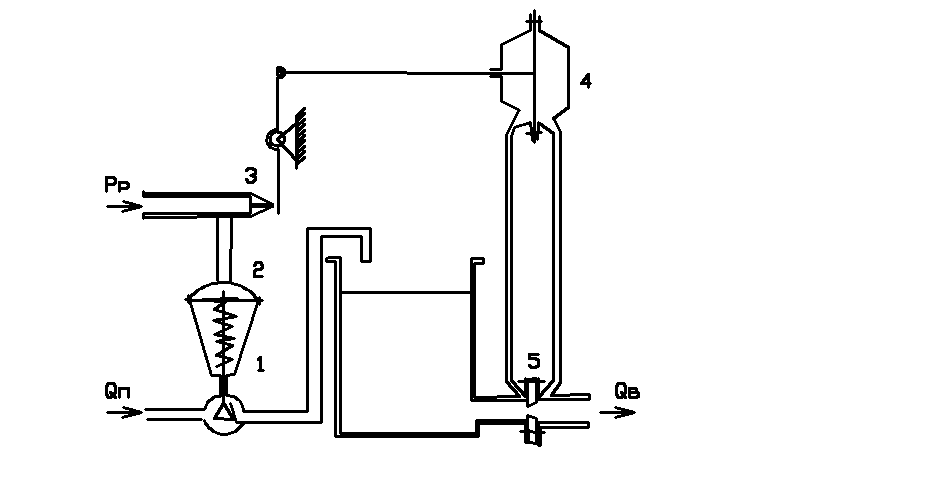
Рис.3.7
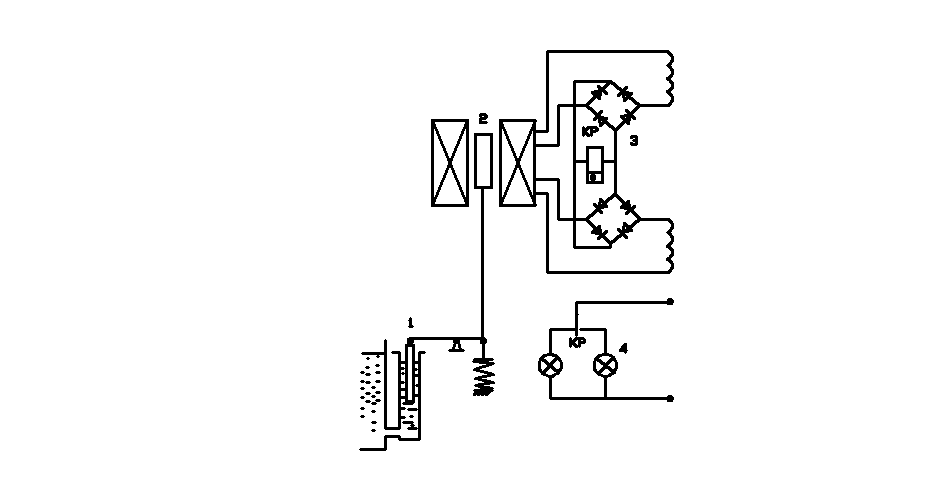
Рис.3.8
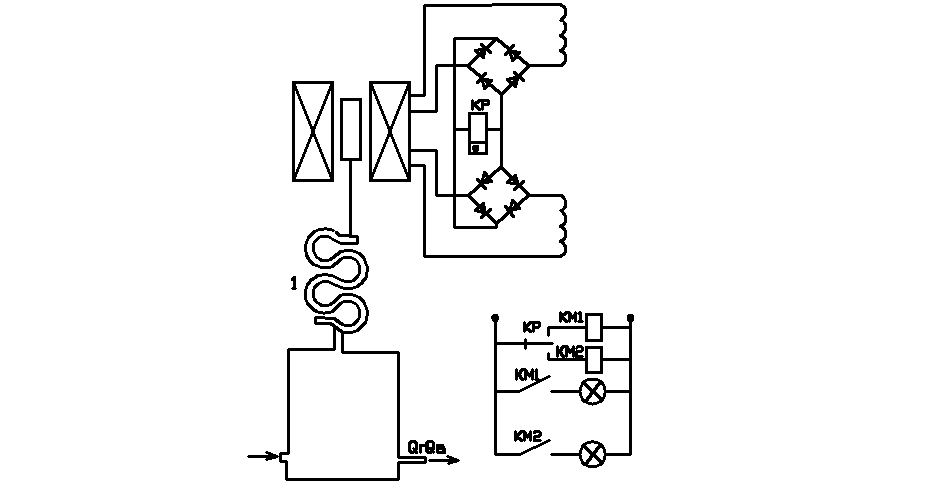
Рис.3.9
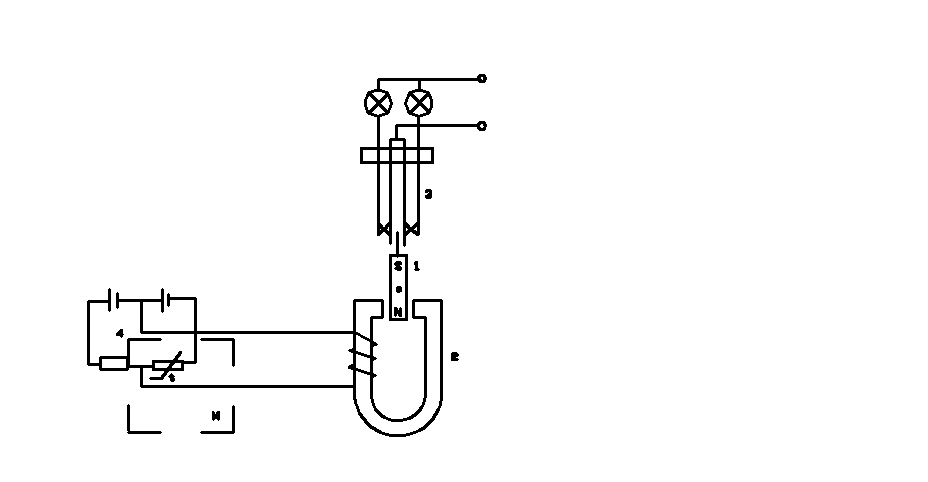
Рис.3.10