

3.3. Центровка роторных машин с помощью лазера
Использование механических индикаторов для центровки роторов имеет недостатки:
возможность деформации хомутов во время измерения;
большое время центровки, связанное с установкой хомутов и креплений;
при присоединении валов роторов используются зубчатые муфты. Они позволяют компенсировать смещение роторов, не превышающее величину люфта муфты, то есть центровка производится относительно люфта в муфте. Это приводит к изменению условий центровки и, самое главное, при этом не устраняются силы, возникающие в центрируемых валах, а проявляются в самой муфте, следовательно, и в подшипниках.
Таким образом, с помощью механических индикаторов устанавливают не истинно горизонтальное положение валов, а положение валов относительно люфта в муфте.
Недостатки, существующие в технологии центровки, приводят к усиленному износу подшипников, износу уплотнений и росту утечек из них, росту нагрузок, усилению вибрации. Технический прогресс позволил на основе лазера и микропроцессора, разработать приборы, которые позволяют устранить недостатки центровки, возникающие при центровке с помощью механических индикаторов.
Два элемента - источник и преобразователь - устанавливают напротив друг друга, каждый на своей опоре, на соответствующей полумуфте и измеряют смещение и перекос валов. Измерение проводится три раза, положение валов 9, 3 и 12 часов. Когда валы повернулись на 180°, лазерные лучи источника и преобразователя опишут две полуокружности. Центры этих полуокружностей совпадают с центрами валов.
Преобразователь измеряет расстояние между центрами, а микропроцессор углы между лучами и разность измеренных расстояний.
Результат измерений представляется на дисплее (рисунок 29), в виде параллельного смещения и перекоса осей валов. На дисплее фиксируется также наличие мягкой лапы (которая не опирается на фундамент), а также результаты измерений, необходимых или получаемых с помощью механических индикаторов. Для достижения требуемой точности в начале центровки с помощью установочных винтов добиваются того, чтобы лазерный луч источника попал в круг мишени преобразователя.
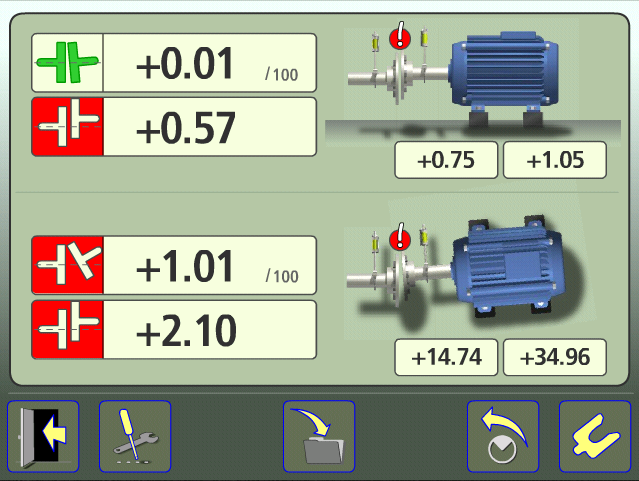
Рисунок 29.
X.1. Термография.
X.1.1. Спектр электромагнитного излучения.
Спектр электромагнитного излучения условно разделен на несколько диапазонов с разными значениями длины волны, которые отличаются методами, используемыми для создания и обнаружения излучения. Фундаментального различия между излучением в разных диапазонах электромагнитного спектра нет. Они все подчиняются одним и тем же законам, и отличия между ними являются следствием только различия длины волны.
В термографии используется инфракрасный диапазон спектра. В коротковолновой его части (темно-красный цвет) пролегает граница с видимым спектром. В длинноволновой части он переходит в микроволновые радиоволны миллиметрового диапазона.
Инфракрасный диапазон часто подразделяется на четыре более коротких диапазона, границы которых также выбраны условно. Эти диапазоны определены следующим образом: ближний инфракрасный (0,75-3 mмкм), средний инфракрасный (3-6 mмкм), дальний инфракрасный (6-15 mмкм) и крайний инфракрасный (15-100 mмкм). Хотя значения длины волны даны в мкм (микрометрах), до сих пор в данном спектральном регионе часто применяются другие единицы измерения длины волн, например, нанометры (mм) и ангстремы (A).
Между собой они соотносятся так:
10 000 А - 1 000 nm = 1 m,. = 1 mm
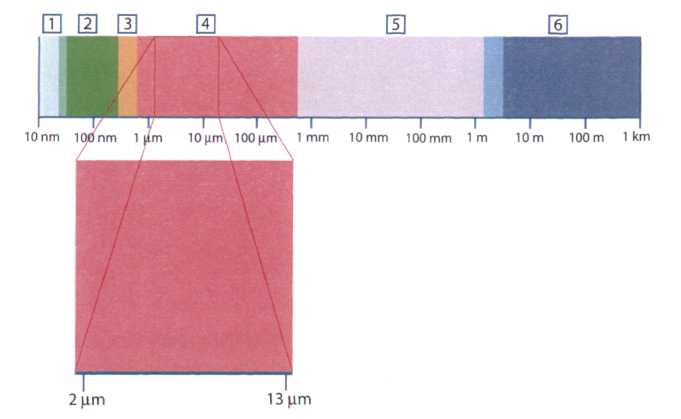
Рисунок 3.1. Спектр электромагнитного излучения:
1 - Рентген, лучи; 2 - УФ; 3 - Видимый; 4 - ИК; 5 - Микроволны; 4 - Радиоволны