

Граница двух полубесконечных сред
Падающая на границу двух сред акустическая волна частично проходит через границу, а частично отражается от нее. При этом может происходить трансформация типов волн. В общем случае на границе двух твердых сред (рисунок 8) возникают по две (продольная и поперечная) отраженных и преломленных волны.
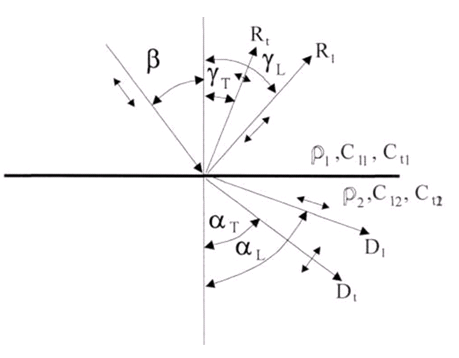
Рисунок - 8. Отражение и преломление волн на границе двух твердых тел.
Направления отраженных и прошедших волн определяются из закона синусов:
![]()
где: |
b |
- |
угол падения; |
|
g |
- |
угол отражения; |
|
a |
- |
угол преломления; |
|
|
- |
скорость продольной волны; |
|
|
- |
скорость поперечной волны. |
Если одна среда (или обе) жидкая или газообразная, то поперечные волны в ней не существуют и количество волн сокращается.
Этот закон следует из равенства фазовых скоростей вдоль границы для всех волн.
Угол отражения продольной волны будет равен углу падения b (т.к. падает продольная волна и скорости падающей и отраженной продольных волн равны).
Т.к.
скорость распространения поперечной
волны
,
меньше ( »2
раза) чем
,
то поперечная волна отразится под углом
![]() ,
меньшим, чем
,
меньшим, чем
![]() .
.
Прошедшие
продольные и поперечные волны также
будут преломляться под разными углами,
причем
![]() .
При увеличении
угла падения b
углы a
и g
будут увеличиваться и при некотором
значении
.
При увеличении
угла падения b
углы a
и g
будут увеличиваться и при некотором
значении
![]() (первый
критический угол) преломленные продольные
волны будут распространяться по
поверхности, не проникая вглубь среды,
а преломленная поперечная волна будет
уходить вглубь среды.
(первый
критический угол) преломленные продольные
волны будут распространяться по
поверхности, не проникая вглубь среды,
а преломленная поперечная волна будет
уходить вглубь среды.
При
дальнейшем увеличении угла b
до значения
![]() (второй критический угол) по поверхности
пойдут поперечные (сдвиговые волны).
(второй критический угол) по поверхности
пойдут поперечные (сдвиговые волны).
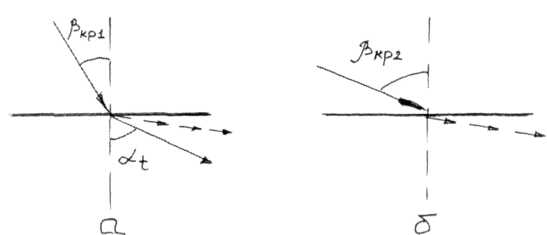
Рисунок ХХХХХХ
Если построить график зависимости углов преломления и отражения от угла падения, то он будет иметь вид, представленный на рисунке 7.
Такой
график строится для конкретного материала
и позволяет быстро определять значения
углов распространения отраженных и
преломленных волн в средах в зависимости
от угла
![]() .
.
При
![]() расщепления
падающей продольной волны на продольную
и поперечную, отражение волны не
происходит. Увеличение угла В от 0 до
90° вызывает трансформацию падающей
продольной волны, в результате чего в
первой среде возникают отраженные, а
во второй среде - преломленные продольные
поперечные волны.
расщепления
падающей продольной волны на продольную
и поперечную, отражение волны не
происходит. Увеличение угла В от 0 до
90° вызывает трансформацию падающей
продольной волны, в результате чего в
первой среде возникают отраженные, а
во второй среде - преломленные продольные
поперечные волны.
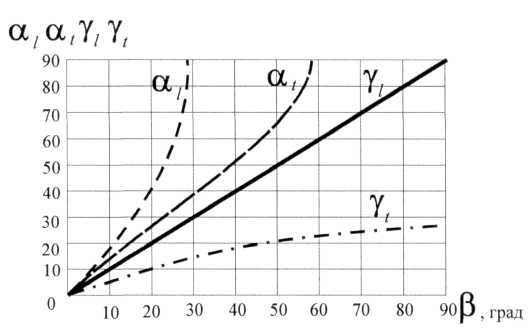
Рисунок ХХХХХ
При расщепления падающей продольной волны на продольную и поперечную, отражение волны не происходит. Увеличение угла В от 0 до 90° вызывает трансформацию падающей продольной волны, в результате чего в первой среде возникают отраженные, а во второй среде - преломленные продольные поперечные волны.
1.3 Преобразователи
1.3.1. Излучатели и приемники акустичсеких колебаний
Как мы уже говорили, ввод акустических колебаний в изделие и регистрация выходящих из изделия акустических колебаний осуществляется с помощью преобразователей электрической энергии в акустический сигнал (излучатели) и преобразователей акустической энергии в электрический сигнал (приемники).
В качестве излучателей и приемников используют чаще всего преобразователи, действие которых основано на пьезоэлектрическом и магнитострикционном эффекте.
Пьезоэлектрический эффект заключается в том, что при сжатии или растяжении пластинки из материала, обладающего пьезоэлектрическими свойствами, на ее гранях появятся электрические заряды, пропорциональные действующей силе и скорости механической деформации пластинки. Этот эффект обратим. Т.е. если мы к пьезопластинке приложим переменное электрическое поле, то ее геометрические форма и размеры будут меняться. Этим изменения пропорциональны амплитуде и скорости изменения электрического поля.
Магнитострикционный эффект заключается в изменении геометрических размеров материалов под действием изменяющегося магнитного поля. Он также обратим. Т.е. при измерении геометрических размеров магнитостриктора, вокруг него возникает изменяющееся магнитное поле, величина которого зависит от силы и скорости изменения геометрических размеров.
В упругой среде, соприкасающейся с пластиной из пьезоэлектрика или магнитостриктора, находящихся соответственно в электрическом или магнитном полях, возникают упругие колебания с частотой, определяемой частотой приложенного магнитного поля.
Максимум энергии, излучаемой в среду, будет наблюдаться при совпадении частоты возмущающего электрического или магнитного поля с частотой механического резонанса пластины.
Для повышения механической прочности изготавливают преобразователи в виде пакета склеенных пластин. Такие преобразователи имеют достаточно высокую прочность и низкие резонансные частоты (из-за большой массы) (15-50кГц), что позволяет использовать их для контроля бетонов, в сейсмических исследованиях и др.
Работают в основном следующие три эффекта:
Эффект намагниченности - ферромагнитное изделие имеет внутреннее магнитное поле. При взаимодействии его с меняющимся внешним магнитным полем происходит смещение частичек среды.
Эффект магнитострикции - это изменение размеров материала при изменениях результирующего магнитного поля.
Эффект вихревых токов - переменное внешнее магнитное поле создает в изделии вихревые токи, которые создают свои переменные магнитные поля.
Магнитное поле вихревых токов, взаимодействуя с переменным внешним магнитным полем, приводит к смещению частичек среды.
В диапазоне частот до 10МГц основной вклад дают эффекты вихревых токов и намагниченности.
С помощью электромагнитно-акустических преобразователей можно возбуждать как продольные, так и поперечные волны. Для примера рассмотрим рисунок:
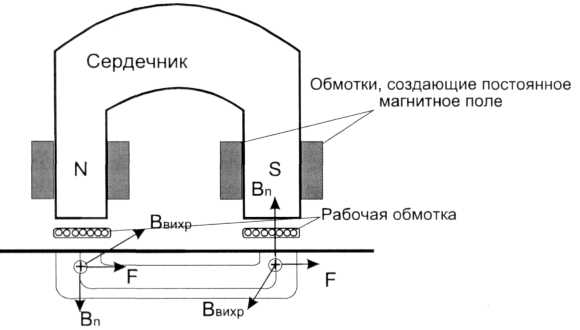
Рисунок – 1. Конструкция ЭМА - преобразователя
При таком расстоянии рабочей обмотки, изменение индукции Вп в зоне действия вихревых токов, расположено нормально к поверхности. Сила F взаимодействия такого поля с полем вихревых токов будет перпендикулярна Вп и Ввихр., т.е. будет направлена по касательной к поверхности. Следовательно, частички среды будут также смещаться вдоль поверхности, т.е. возбуждаются поперечные волны. Для возбуждения продольных волн используют другой тип преобразователя. Здесь изменение индукции Вт направлено по касательной к поверхности, следовательно, возбуждаются отходящие от границы продольные волны.
Термоакустический эффект. Известно, что если нагреть поверхностный участок какого-либо тела, то другие участки этого тела приобретут повышенную температуру не сразу, а лишь спустя некоторое время. Неравномерное распределение температуры приводит к неравномерному тепловому расширению тела, к появлению термомеханических напряжений. Поскольку эти напряжения изменяются во времени, то в результате возникают акустические волны, излучаемые слоем с изменяющейся температурой. В этом и заключается суть термоакустического эффекта.
Нагрев может осуществляться бесконтактно (индукционный нагрев) и даже дистанционно (нагрев лучом лазера), что дает возможность для бесконтактного возбуждения акустических колебаний в объекте контроля.
ВЫБОР ПАРАМЕТРОВ ПРЕОБРАЗОВАТЕЛЕЙ
Основные требования к преобразователям
При проектировании УЗ дефектоскопов решаются следующие основные задачи:
Достижение максимальной чувствительности, т.е. максимального значения модуля коэффициента двойного преобразования к на некоторой оптимальной рабочей частоте.
Получение максимальной ширины полосы пропускания частот, т.е. расширение АЧХ коэффициента преобразования к. Широкополосность преобразователя обеспечивает возможность формирования акустического импульса заданной формы при излучении и возможность неискаженного восстановления акустического импульса при приеме.
Достижение максимальной стабильности акустического контакта преобразователя с объектом контроля. Это условие обеспечивает постоянство величины к при перемещении преобразователя по поверхности контролируемого изделия. При постоянном акустическом контакте в результате измерения будет вноситься дополнительная погрешность. Численно стабильность контакта оценивается статическим и динамическим коэффициентами.
Снижение шумов преобразователя. Шум определяется реверберационно-шумовой характеристикой, т.е. зависимостью амплитуды шумов от времени после окончания зондирующего импульса. Главный источник шумов - многократное отражение УЗК от протектора, демпфера и других конструкционных элементов.
Согласование полного электрического сопротивления преобразователя с генератором и усилителем. Полное электрическое сопротивление зависит от электрической и акустической нагрузок и является величиной комплексной.
Формирование акустического поля с заданными параметрами.
Повышение износостойкости преобразователя.
Рассмотрим применяемые в настоящее время технические решения для выполнения перечисленных требований.