

2.5. Критерии и нормы балансировки
В полностью сбалансированных машинах сил, связанных с дебалансом, не должно возникать. Но на практике, вследствие наличия в машинах при изготовлении допусков, полная балансировка невозможна. Для различных типоразмеров машин уровни вибрации, которые могут считаться повышенными, сильно отличаются.
Классификация
типов роторов и допустимые значения
относительного дебаланса в
![]() приведены
в стандарте ISO
1940 (рисунок 13). При этом в качестве
аргументов используются класс ротора,
который представляет собой максимальную
амплитуду виброскорости на оборотной
гармонике в мм/с, и число оборотов вала.
приведены
в стандарте ISO
1940 (рисунок 13). При этом в качестве
аргументов используются класс ротора,
который представляет собой максимальную
амплитуду виброскорости на оборотной
гармонике в мм/с, и число оборотов вала.

Рисунок 13. Допустимые значения остаточного относительного дебаланса по ISO 1940.
Полученная после балансировки величина относительного дебаланса не должна превышать величин, приведенных в стандарте.
При расчете максимально допустимого остаточного дебаланса предполагают, что ротор симметричен относительно центра вала. Если ротор является не симметричным относительно центра, то при выборе допустимых величин остаточного дебаланса, необходимо скомпенсировать суммы моментов относительно центра (рисунок 14).
В этом случае допустимый остаточный дебаланс распределяется следующим образом: на дальнем подшипнике 1/3, на ближнем 2/3 суммарной величины. Сумма моментов относительно центра масс будет скомпенсирована.
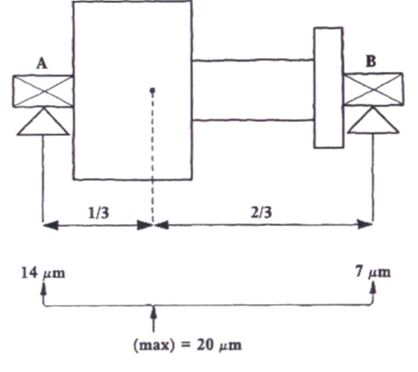
Рисунок 14. Определение величины допустимого остаточного относительного дебаланса для несимметричного ротора
2.6. Принцип и процедура динамической балансировки роторов
В процессе динамической балансировки роторов используются результаты измерений абсолютной вибрации. Однако амплитуда абсолютной вибрации зависит не только от дебаланса ротора, но и от жесткости подшипниковой стойки. Поэтому в процессе балансировки необходимо использовать амплитуду вибрации первой гармоники, которая определяет величину дебаланса.
Поскольку для балансировки ротора необходима установка корректирующей массы определенной величины с определенной угловой координатой, то цель балансировки заключается в определении величины корректирующей массы.
При этом угловая координата дебаланса просто вычисляется по результатам измерений.
Процедура балансировки
Прежде чем приступить к балансировке, необходимо измерить частоту вращения вала. С этой целью может использоваться оптический, фотоэлектрический тахометр.
В основу балансировки жестких роторов в собственных подшипниках положено измерение амплитуды и фазы оборотной гармоники вибрации. Этот процесс состоит из следующих этапов:
проверка необходимости балансировки с использованием вибродиагностических признаков дебаланса;
измерение амплитуды и фазы оборотной гармоники на роторе в исходном состоянии;
на ротор, почти произвольном образом, устанавливается пробная масса, после чего измеряются также амплитуда и фаза оборотной гармоники;
на основании проведенных измерений строятся векторные диаграммы и определяется величина корректирующей массы;
установка корректирующей массы;
контрольное измерение после установки корректирующей массы и проверка допустимости остаточного дебаланса.
Схема измерений представлена на рисунок15 (1 - датчик вибрации; 2 - тахометр; 3 - фильтр и измеритель фазы гармоники; 5 - измеритель амплитуды гармоники).
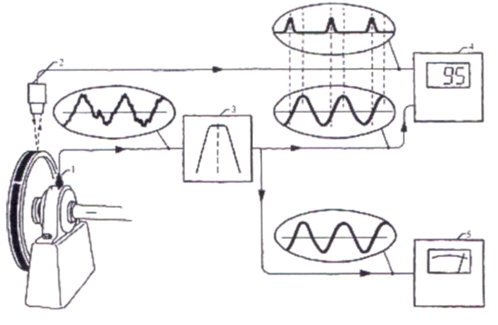
Рисунок 15. Схема измерений при балансировке ротора в собственных подшипника: 1 - датчик вибрации; 2 - тахометр; 3 - фильтр, выделяющий оборотную гармонику; 4 - измеритель фазы гармоники; 5 - измеритель амплитуды гармоники
Датчик вибрации - акселерометр устанавливается на корпусе подшипника и позволяет оценить изменение вибрации во времени (сложный сигнал). С помощью фильтра из этого сигнала выделяется первая гармоника, которая характеризует наличие дебаланса. Тахометр измеряет число оборотов вала и, при сопоставлении отметок тахометра и оборотной гармоники вибрации, определяется относительная фаза дебаланса. В результате получаем два измерения: амплитуду вибрации оборотной гармоники - А0; Ф0 - относительную фазу дебаланса.
После
этого на ротор устанавливается пробная
масса
![]() и
проводится тот же цикл измерений:
определяются амплитуда и фаза первой
гармоники А, и Ф,. Зная величины А0,
Ф0,
Ф1
и А, , рассчитывают Мс
- корректирующую массу и Фс
- угловую координату корректирующей
массы (Рисунок 16),
и
проводится тот же цикл измерений:
определяются амплитуда и фаза первой
гармоники А, и Ф,. Зная величины А0,
Ф0,
Ф1
и А, , рассчитывают Мс
- корректирующую массу и Фс
- угловую координату корректирующей
массы (Рисунок 16),
![]() -
масса дебаланса.
-
масса дебаланса.
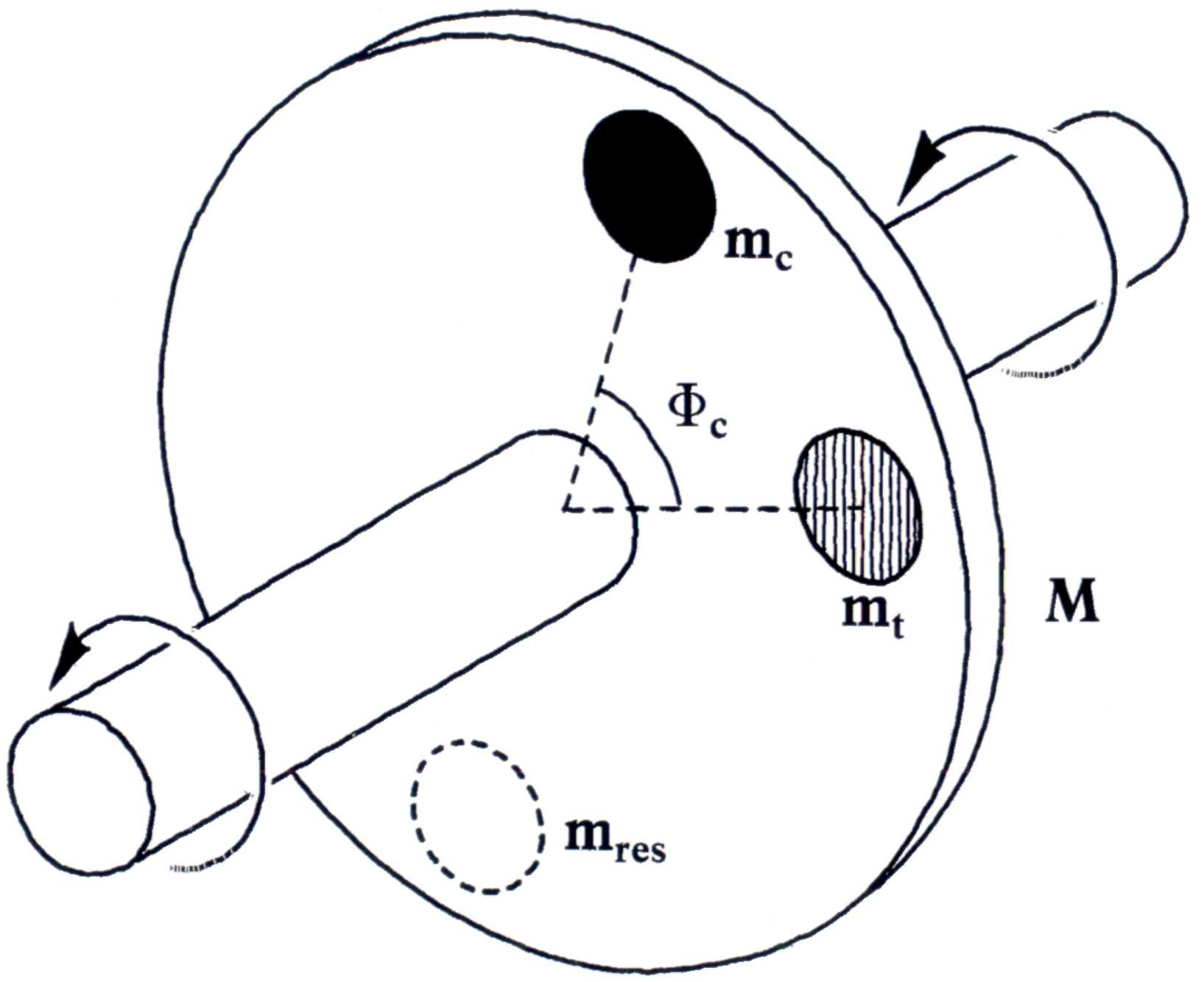
Рисунок 16. Принцип балансировки:
М - масса существующего дебаланса;
т - пробная масса; т ; Ф масса и угловая координата корректирующей массы
Для использования предлагаемой схемы необходимо:
выбрать пробную массу;
построить векторную диаграмму и рассчитать корректирующую массу;
убедиться в правильности измерений;
решить вопрос о величине корректирующей массы, если нет возможности установить ее на том же радиусе, что и пробную.
Выбор пробной массы
Выбор пробной массы должен быть основан на оценке эффекта, который пробная масса оказывает на вибрационное состояние ротора. Если пробная масса будет слишком большой, возникает опасность перегрузки и искривления, если маленькой - то точность определения корректирующей массы будет невысока.
Из определения эксцентриситета (2)
![]() (3)
(3)
где: |
|
- |
Масса дебаланса; |
|
|
- |
радиус ее расположения; |
|
М |
- |
масса ротора; |
|
|
- |
относительный дебаланс, или эксцентриситет. |
Последнюю зависимость можно использовать для оценки величины пробной массы. При этом величина допустимого эксцентриситета (дебаланса) берется из стандарта ISO 1940 по определению допустимой величины дебаланса. Рекомендуется, чтобы пробная масса была в 5-10 раз больше величины, рассчитанной по максимально допустимому дебалансу для данного класса роторов и данного числа оборотов.
Если М = 50 кг, то т = 10 г, следовательно, пробная масса должна меняться от 50 до 100 г (рисунок 17). На практике лучше устанавливать меньшую пробную массу и снижать вероятность развития дефектов и разрушения ротора.

Рисунок 17. К выбору величины пробной массы
Векторная диаграмма
В
результате измерений мы получаем
следующую информацию:
![]() ,
,
![]() и
и
![]() ,
,
![]() ,
после установки пробной массы m
(Рисунок 18 а, б).
,
после установки пробной массы m
(Рисунок 18 а, б).
Процесс
балансировки заключается в том, что
после установки корректирующей массы
мы получаем вектор
![]() .,
амплитуда которого равна амплитуде
вектора
,
а фаза отличается на 180°. С целью
определения величины
.,
амплитуда которого равна амплитуде
вектора
,
а фаза отличается на 180°. С целью
определения величины
![]() вычтем из вектора
вычтем из вектора
![]() ,
проведем из начала координат вектор
параллельный
,
проведем из начала координат вектор
параллельный
![]() (рисунок
19 а). Далее продолжим вектор
(рисунок
19 а). Далее продолжим вектор
![]() за
начало координат (рисунок 19 б). Теперь
для определения величины
необходимо
довернуть его на угол
за
начало координат (рисунок 19 б). Теперь
для определения величины
необходимо
довернуть его на угол
![]() и уровнять амплитуды
и
.
и уровнять амплитуды
и
.
|
|
|
а) |
б) |
в) |
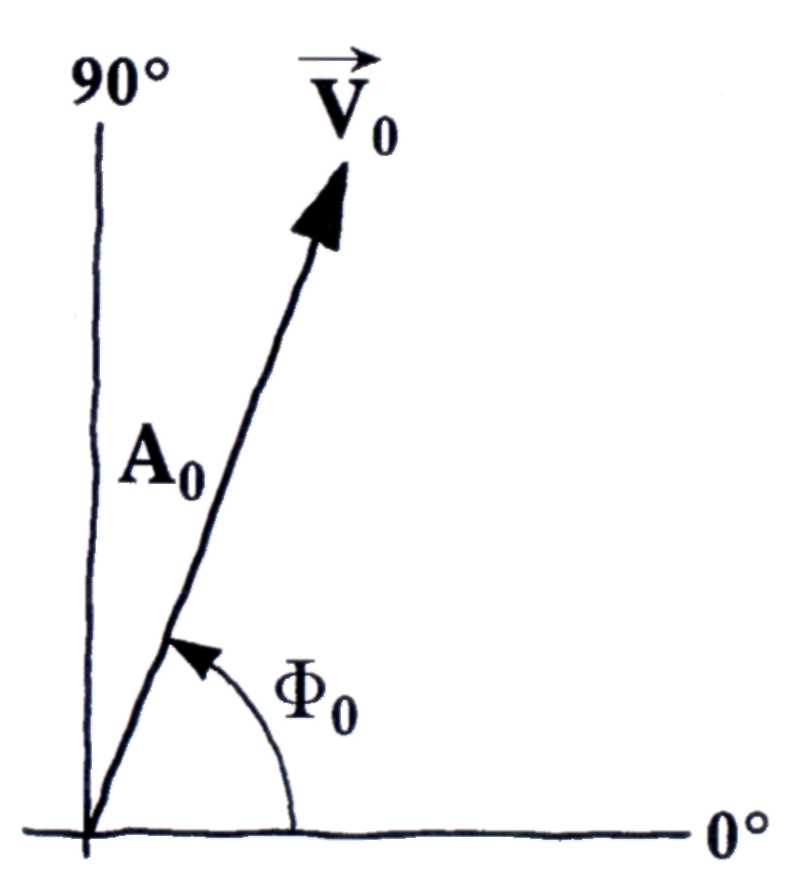
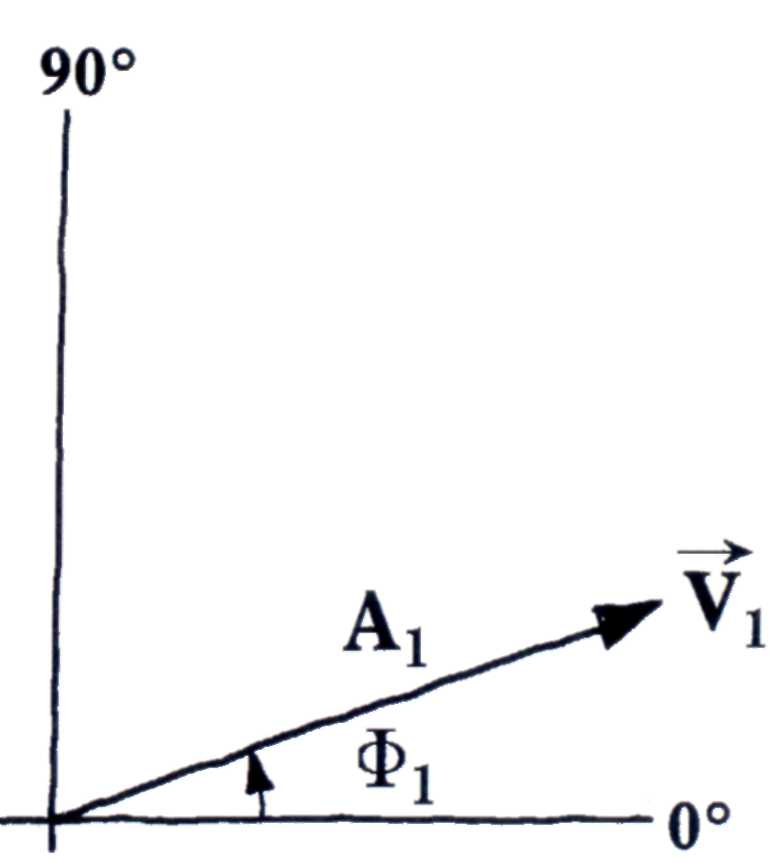
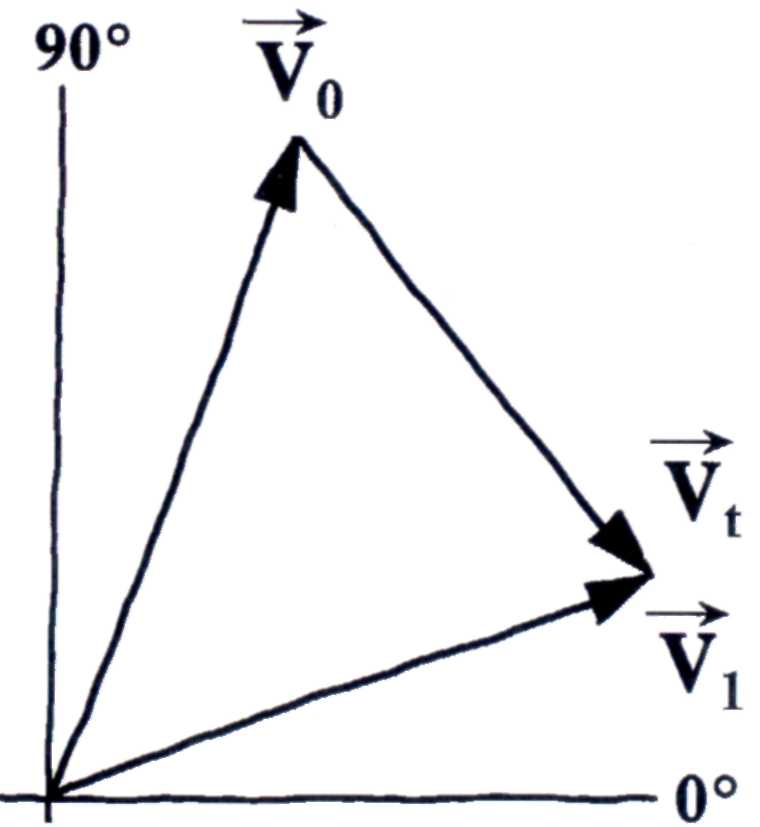
Рисунок 18. К построению векторной диаграммы балансировки
В основу определения величины корректирующей массы тс положено предположение о линейности системы, в соответствии с которым амплитуда оборотной гармоники вибрации пропорциональна величине массы дебаланса, то есть
![]() (4)
(4)
![]() (5)
(5)
Величина угловой координаты установки корректирующей массы может быть определена по формуле
![]()
или сразу определена после измерения величины .
|
|
а) |
в) |
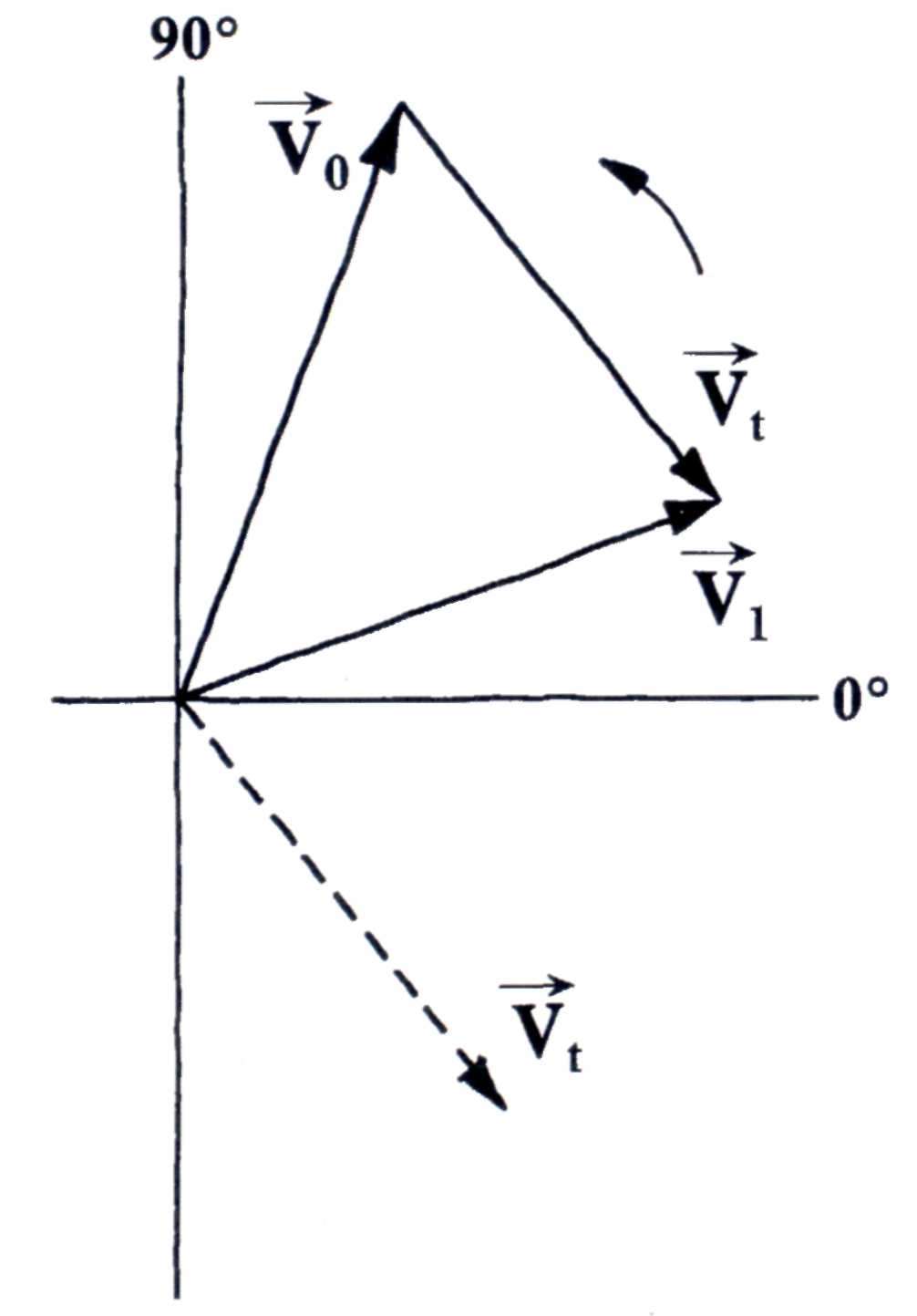
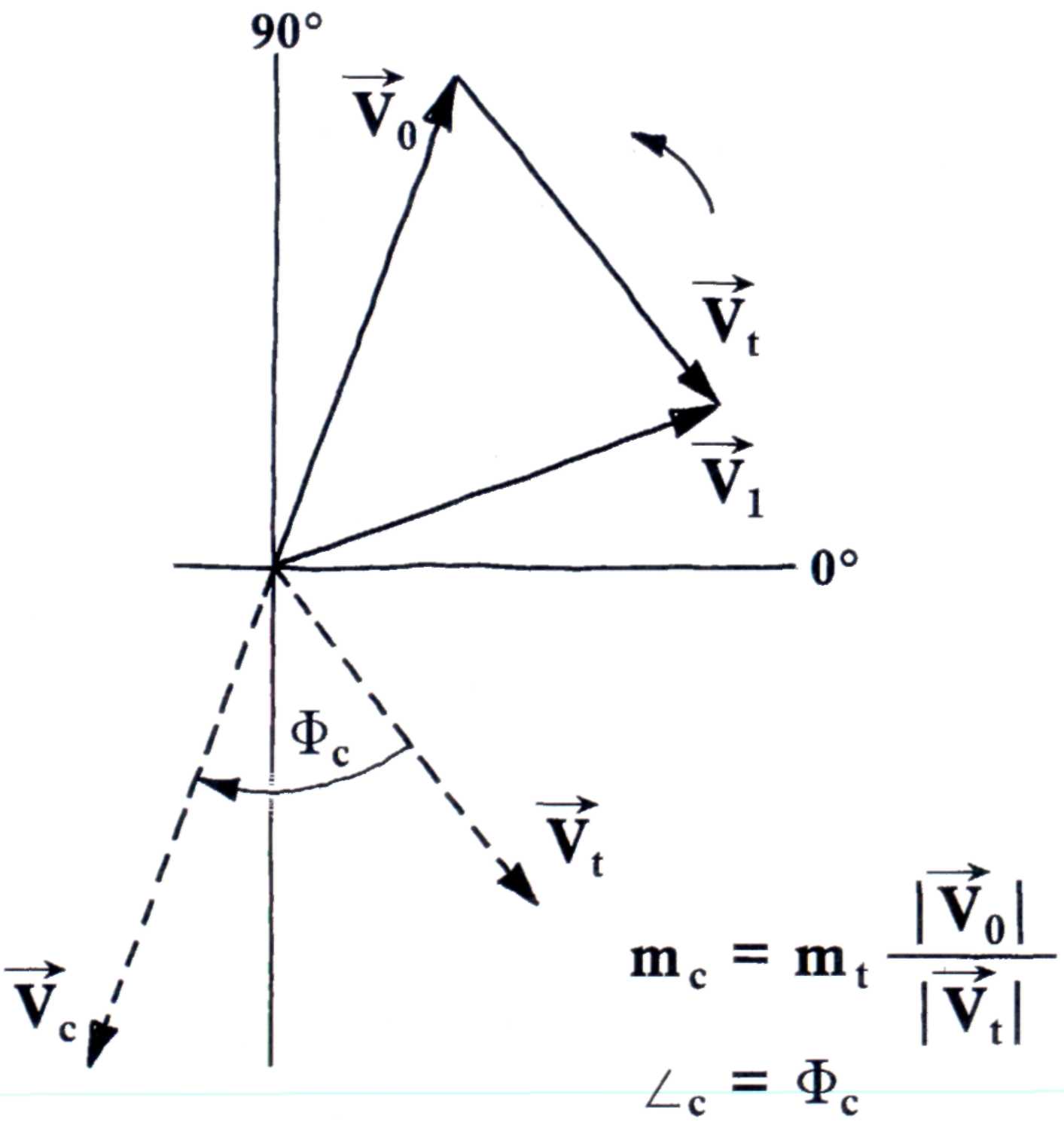
Рисунок 19. Векторная диаграмма балансировки:
Проверка результатов измерений
Несмотря
на тщательность выбора пробной массы,
может случиться, что полученные результаты
оказываются малопригодными для
балансировки. Поэтому, прежде чем
использовать результаты измерений,
следует убедиться в их качестве. То есть
прежде чем использовать результаты для
практической балансировки, надо
убедиться, что разность векторов
![]() ,
,
![]() получена с достаточной точностью, т.е.
погрешность невелика. При этом возможны
следующие случаи:
получена с достаточной точностью, т.е.
погрешность невелика. При этом возможны
следующие случаи:
![]() ,
и
,
и
![]()
|
|
> 25 % |
|
Увеличить пробную массу |
Передвинуть пробную массу |
> 25 % |
Использовать результаты измерений |
|
Если < 25 % и < 25 % (Рисунок 20а), то вектор , очень мал, и пробная масса не сильно изменила начальное вибрационное состояние ротора. Поскольку точность измерения фазы не превышает 1°, то небольшая погрешность измерения приводит к большой погрешности определения , Поэтому следует увеличить пробную массу и повторить измерения. Это относится и к случаю, когда < 25% и > 25% (Рисунок 20 б). В случае > 25 % результаты измерений можно использовать для выбора корректирующей массы.
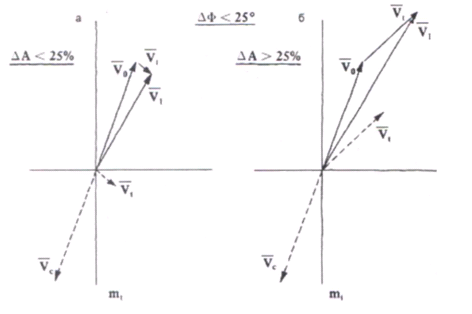
Рисунок 20. К проверке результатов измерений при разности фаз < 25°:
а
- Разность амплитуд
<25%, необходимо увеличить пробную массу
![]()
б - Разность амплитуд >25%, необходимо изменить угловую координату установкипробной массы
Установка корректирующей массы
Если использовать формулу для расчета угла установки корректирующей массы, то этот угол может быть положительным и отрицательным. Если угол положительный, то он измеряется от угла установки пробной массы в направлении вращения ротора, если отрицательный - то в противоположную сторону от вращения ротора. Корректирующая масса устанавливается на том же радиусе, что и пробная. Если такой возможности нет, то корректирующая масса должна быть увеличена пропорционально изменению радиуса (рисунок 21)
![]() (6)
(6)
где: |
|
- |
радиус установки пробной массы; |
|
|
- |
радиус установки корректирующей массы. |
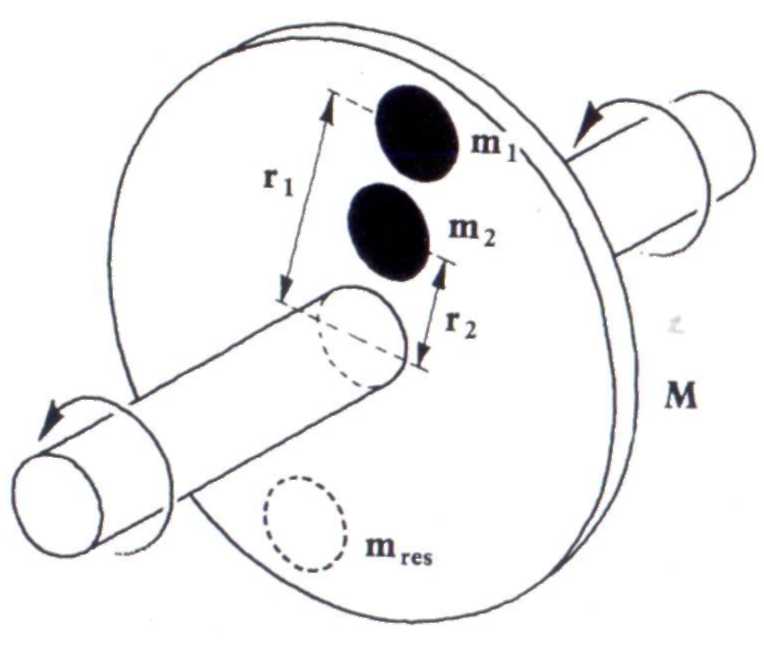
Рисунок 21. К выбору радиуса установки корректирующей массы: mres - масса дебаланса