

3.2. Принцип действия пьезоэлектрического акселерометра.
На рисунок 3.1. показана упрощенная и содержащая лишь основные элементы модель акселерометра. Активные элементы этого акселерометра, изготовленные из пьезоэлектрического материала, выполняют роль пружин, обеспечивающих механическую связь между соединенной с основанием стойкой треугольного сечения и тремя сейсмическими (инерционными) массами.
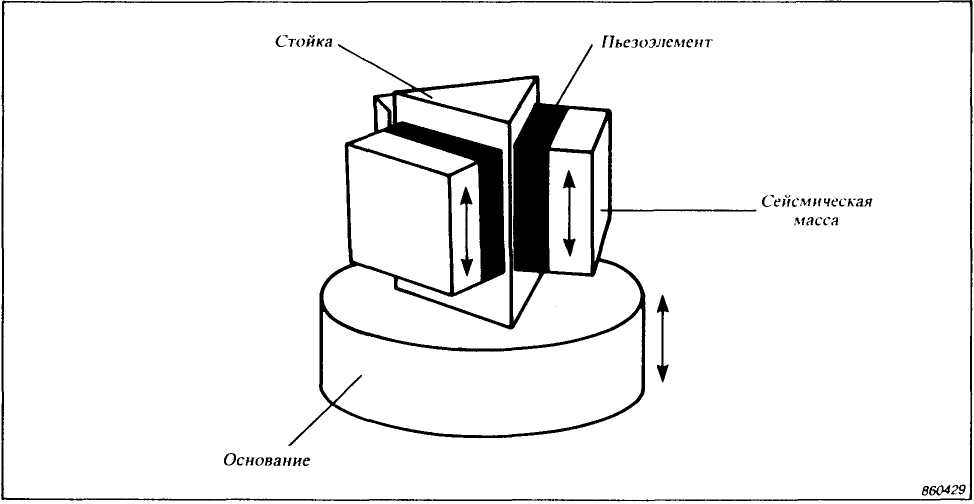
Рисунок 3.1. ‑ Упрощенная модель пьезоэлектрического акселерометра
Воздействующие на основание акселерометра механические колебания приводят к тому, что на каждый пьезоэлемент действует динамическая сила, равная произведению ускорения сейсмической массы на соответствующую массу. Отдельные пьезоэлементы генерируют электрический заряд, пропорциональный действующей на них динамической силе. Сейсмические массы акселерометра вообще не изменяются и, следовательно, имеющийся на электродах пьезоэлементов электрический заряд пропорционален ускорению этих масс. Поскольку амплитуда и фаза ускорения сейсмических масс в широком частотном диапазоне идентична амплитуде и фазе ускорения основания акселерометра, отдаваемый последним общий электрический заряд пропорционален ускорению его основания и, следовательно, ускорению механических колебаний поверхности объекта, на котором акселерометр закреплен.
Описанную выше систему пьезоэлектрического акселерометра можно представить в виде еще более упрощенной и допускающей несложное математическое описание механической модели (см. рисунок 3.2).
3.3. Аналитическое представление пьезоэлектрического акселерометра.
На рисунке 3.2. показана упрощенная механическая модель описанного выше акселерометра. Эта модель является отнесенной к инерциальной системе моделью колебательной системы с одной степенью свободы, содержащей две незакрепленные и соединенные друг с другом через идеально упругий элемент сейсмические массы, демпфирование в данной модели не учитывается.
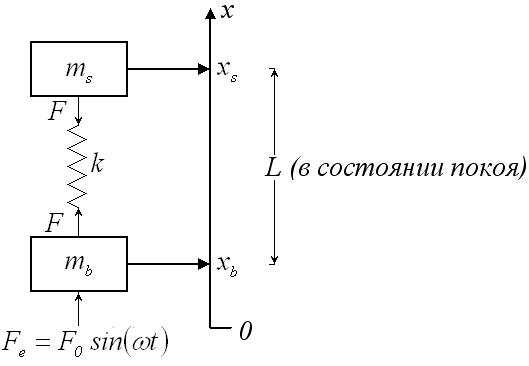
Рисунок 3.2. – Аналитическое представление акселерометра
В выражениях, используемых ниже с целью аналитического описания устройства и характеристик пьезоэлектрического акселерометра, используются следующие обозначения:
|
|
- |
общая сейсмическая (инерционная) масса; |
|
|
- |
масса основания акселерометра; |
|
|
- |
перемещение сейсмической массы; |
|
|
- |
перемещение основания акселерометра |
|
L |
- |
расстояние между сейсмической массой и основанием в состоянии покоя акселерометра в инерциальной системе; |
|
k |
- |
эквивалентная жесткость пьезоэлементов; |
|
|
- |
гармоническая вынуждающая сила; |
|
|
- |
амплитуда силы; |
|
|
- |
угловая
частота вынуждающей силы (рад/с),
|
|
|
- |
угловая частота собственного резонанса акселерометра (рад/с); |
|
|
- |
угловая частота резонанса закрепленного на объекте акселерометра (рад/с); |
|
|
- |
частота резонанса закрепленного на объекте акселерометра (Гц); |
|
|
- |
частота вынуждающей силы (Гц) |
Учитывая силы, воздействующие на элементы показанной на рисунке 3.2 модели, можно написать следующие уравнения:
|
|
- |
(сила, воздействующая на упругий элемент); |
|
|
- |
(сила, воздействующая на основание акселерометра); |
|
|
|
(сила, воздействующая на сейсмические массы). |
Движение элементов показанной на рисунке 3.2 модели определяется уравнением
|
(4) |
или
![]() ,
,
где
![]() или
или
![]() .
.
Отметим, что параметр часто называют «приведенной массой» акселерометра. Символом r обозначено перемещение сейсмической массы относительно основания акселерометра, т.е.
![]() .
.