

1.4. Расчет ускорений методом планов
При расчете ускорений считаем, что кривошип вращается с постоянной угловой скоростью, тогда ускорение точки А кривошипа вычисляется по формуле [1, 3]
аА = ω12r = м/с2. (1.4)
Ускорение аВ точки В шатуна связано с ускорением точки А кривошипа зависимостью [1, 3].
→ → → →
аВ = аА + аnВА+ аτАВ , (1.5)
где аА – переносное ускорение; аnВА и аτАВ – нормальная и тангенциальная составляющие относительного ускорения.
Ускорение аА направлено параллельно кривошипу из точки А к центру О вращения звена, ускорение аnВА – параллельно шатуну, а аτАВ – перпендикулярно АВ.
Поскольку в относительном движении шатун вращается, то
аnВА
= ω22
![]() =
=
Ускорение точки В шатуна направлено параллельно направляющей ползуна.
Уравнение (1.5) имеет два неизвестных. Графическое его решение для пятого положения механизма приведено на рис. 5.
Масштабный коэффициент плана ускорений:



Рис. 5
Длина отрезка n4a4, которым изображается на плане ускорений anBA, вычисляется следующим образом:
n4a4 = anBA/μа = мм.
Ускорение аS2 центра масс шатуна определяется по свойству подобия плана ускорений. Составляем пропорцию:

![]()
Отрезок а4s2 откладываем на плане ускорений на отрезке а4b4 от точки а4. Полученную точку s2 соединяем с полюсом pa плана. Отрезок s2pa изображает в масштабе μа ускорение центра масс шатуна.
Расчет ускорений:
аτBA = n4b4∙μa = = м/с2;
aBA = a4b4∙μa = = м/с2;
aB = pab4∙μa = = м/с2;
aS2 = pas2∙μa = = м/с2.
Расчет углового ускорения шатуна:
 =
= 1/с2.
=
= 1/с2.
Расчет ускорений выполнен для двух положений механизма. Результаты приведены в табл. 2.
Таблица 2
-
Ускоре-ние
№ п/п
aA
anBA
aτBA
aBA
aS2
aB
ε2
м/с2
1/с2
1.5. Кинематический анализ механизма методом диаграмм
1.5.1. Построение диаграммы перемещения выходного звена
Диаграмма перемещения выходного звена строится в зависимости от функции времени. При ω1 = const каждому моменту времени соответствует определенный угол поворота кривошипа. В связи с этим по оси абсцисс откладывают не только время, но и угол α поворота кривошипа, которому соответствует определенное его положение.
На оси абсцисс диаграммы (рис. 6) откладываем отрезок 0 – 12 длиной ℓ=180 (или 240) мм. Он изображает в масштабе μα угол поворота кривошипа, равный 3600 или 2π. Тогда масштабный коэффициент μα будет вычисляться по формуле:
![]() =
=
![]()
Если угол измеряется в радианах, то
![]() =
=
![]()
Отрезок ℓ изображает и время tц одного полного оборота кривошипа. Его можно вычислить следующим образом:
![]()
Тогда
масштабный коэффициент
![]() =
с/мм.
=
с/мм.
Масштабный коэффициент μs оси ординат примем равным μℓ (масштабный коэффициент разметки).
μs =
Для
построения диаграммы перемещения (рис.
6) определим длину отрезка
![]() ,
который в масштабе μα
изображает угол рабочего хода (угол
между крайними положениями кривошипа
во время рабочего хода механизма).
,
который в масштабе μα
изображает угол рабочего хода (угол
между крайними положениями кривошипа
во время рабочего хода механизма).
=
![]() =
мм.
=
мм.
Отрезок
отложим
на оси абсцисс диаграммы от начала
координат. Этот отрезок разделим на
шесть равных частей и обозначим
соответствующие положения механизма
(0; 1; 2; 3; 4; 5; 6). Оставшийся отрезок
![]() разделим на 6 равных частей и обозначим
соответствующие холостому ходу положения
механизма. Это – 7, 8, 9, 10, 11 и 12 положения.
разделим на 6 равных частей и обозначим
соответствующие холостому ходу положения
механизма. Это – 7, 8, 9, 10, 11 и 12 положения.
Из точек 1, 2, 3 ….. 12 оси абсцисс диаграммы проводим к ней перпендикуляры, на которых откладываем отрезки В0В1, В0В2, В0В3 и т.д., изображающие перемещение ползуна в 1-м, 2-м, 3-м и т.д. положениях механизма. Полученные точки соединим плавной кривой. Это и есть диаграмма перемещения.
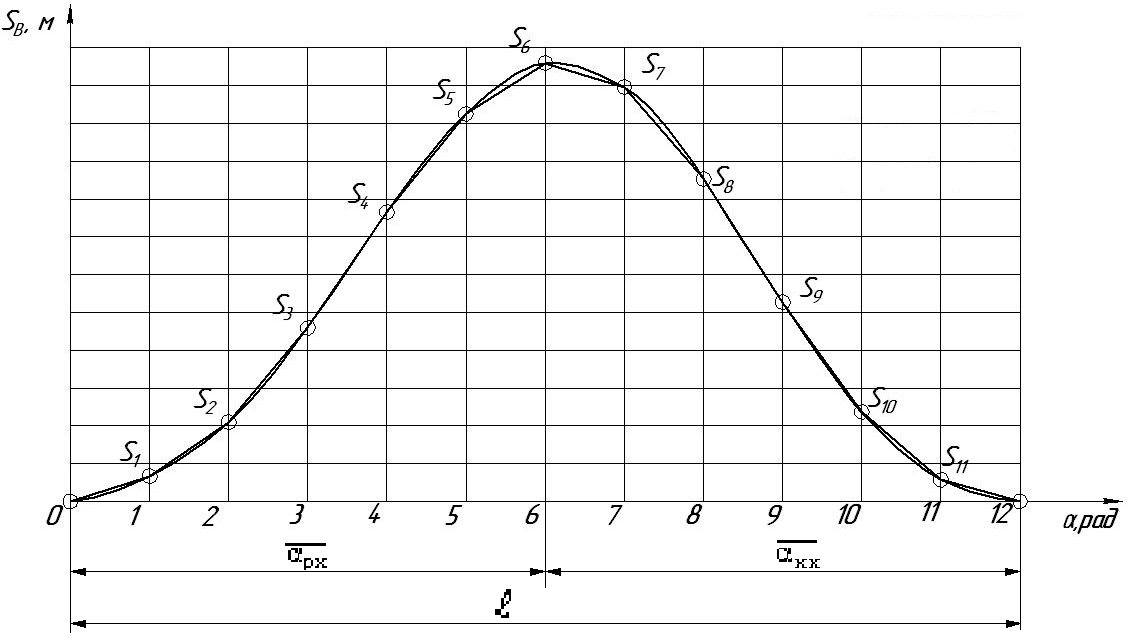
Рис. 6. График перемещения точки В