

Балтийский Государственный Технический Университет
им. Д.Ф. Устинова ВОЕНМЕХ

Кафедра мехатроники и робототехники

Курсовая работа по курсу Теория автоматического управления
Вариант 29
Студент: Семухин С. Ю.
Группа: Н171.
Преподаватель: Коробова И.Л.
Санкт-Петербург
2009г.
Содержание
Исходные данные……………………………………………………………..…3
Постановка задания…………………………………………………………...…3
3.1 Передаточная функция разомкнутой системы……………………………4
3.2 Заключение об устойчивости системы……………………………………6
3.3 Показатели качества замкнутой системы…………………………….…...7
3.4 Переходная и импульсная переходная функции…………………..……..9
3.5 Аналитическое выражение переходной функции………………….……11
3.6 Амплитудные характеристики замкнутой системы…………………..…14
3.7 Уравнения состояния и выхода замкнутой системы………………….....16
4. Используемая литература………………………………………………………....18
1. Исходные данные.
 ,
,
![]()
![]()
2. Постановка задания.
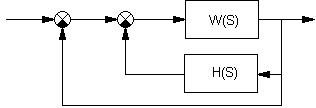
1. Определить передаточную функцию разомкнутой системы с коррекцией в цепи обратной связи и построить её логарифмические частотные характеристики.
Дать заключение об устойчивости замкнутой системы, определить запасы устойчивости.
2. Оценить показатели качества замкнутой системы, определив нули и полюса передаточной функции.
3. Построить графики переходной функции и импульсной переходной функции определить показатели качества переходного процесса (для оценки времени регулирования принять ∆=3%).
4. Найти аналитическое выражение переходной функции. Выделить составляющую найденной функции, соответствующую доминирующим полюсам, сравнить графики функции и указанной её составляющей.
5. Построить логарифмическую амплитудно-частотную характеристику замкнутой системы, определить полосу пропускания системы, резонансную частоту, показатель колебательности.
6. Найти уравнения состояния и выхода замкнутой системы. Проверить свойства управляемости и наблюдаемости этих вариантов.
Передаточная функция разомкнутой системы.
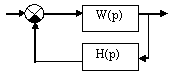
Передаточная функция разомкнутой системы:
![]() ,
,
где
![]() ;
;
![]() .
.
С помощью пакета Matlab ищем каноническую форму передаточной функции
>> S=tf('p');
>> W=125*(0.02*S+1)/(S*(0.125*S+1)*((0.005^2)*(S^2)+0.002*S+1));
>> H=0.04*(S^2)/(0.2*S+1);
>> sys1=1/(1/W+H);
>> zpk(sys1)
800000 (p+50) (p+5)
------------------------------------------------------------------
p (p+42.66) (p+0.1886) (p^2 + 50.16p + 1.989e005)
![]()
С помощью пакета Matlab построим логарифмические характеристики:
0.5 p^2 + 27.5 p + 125
-----------------------------------------------------------
6.25e-007 p^5 + 5.813e-005 p^4 + 0.1257 p^3 + 5.327 p^2 + p
>> num=[ 0.5, 27.5, 125];
>> den=[0.000000625, 0.00005813, 0.1257, 5.327, 1, 0];
>> w=logspace(-2, 3, 200);
>> [mag,fi]=bode(num,den,w);
>> semilogx(w,20*log10(mag));
>> grid
>> title('L(w)')
>> semilogx(w,fi)
>> grid
>> title('fi')
>> title('fhase')
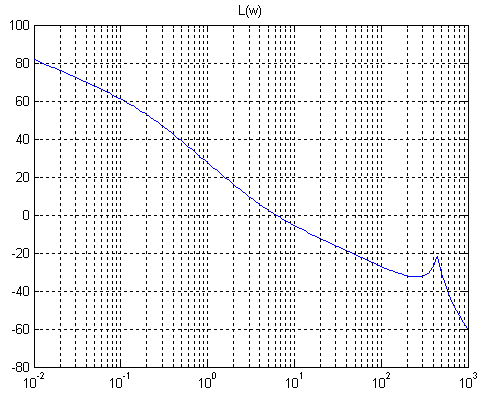
Рис.1
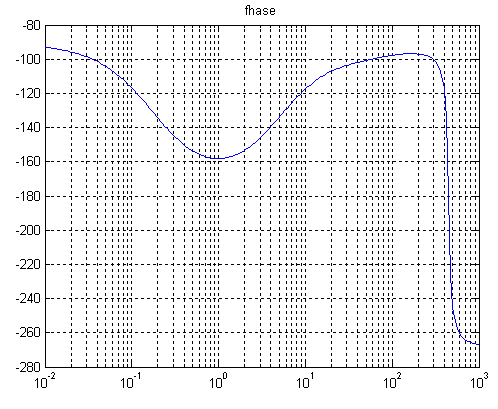
Рис.2