

33 . Дифференциальные уравнения сферического и свободного движений твердого тела
В
случае сферического движения, если в
качестве подвижных осей взять главные
оси инерции тела и ввести
обозначения ![]() ,
, ![]() ,
, ![]() ;
; ![]() ,
, ![]() ,
, ![]() ,
то
,
то
![]() ,
,
![]() ,
,
![]() .
.
Эти уравнения называются динамическими уравнениями Эйлера. Они допускают аналитическое интегрирование при произвольных начальных условиях (определение закона сферического движения твердого тела при известных действующих силах) в трех случаях.
Случай Эйлера–Пуансо. Центр масс тела произвольной формы совпадает с неподвижной точкой. Движение тела происходит по инерции.
Случай
Лагранжа–Пуассона. Эллипсоидом инерции
для неподвижной точки является
эллипсоид вращения ![]() и
центр масс лежит на оси вращения
эллипсоида инерции. (Симметричный
волчок).
и
центр масс лежит на оси вращения
эллипсоида инерции. (Симметричный
волчок).
Случай
Ковалевской. Эллипсоид инерции для
неподвижной точки есть вытянутый
эллипсоид вращения при ![]() .Центр масс
тела лежит в экваториальной плоскости
эллипсоида инерции. (Асимметричный
волчок).
.Центр масс
тела лежит в экваториальной плоскости
эллипсоида инерции. (Асимметричный
волчок).
Кинетический момент относительно неподвижной точки и кинетическая энергия твердого тела при сферическом движении определяются выражениями:
![]() ,
,
![]()
В случае Эйлера–Пуансо два общих интеграла системы дифференциальных уравнений движения твердого тела находятся непосредственно из законов сохранения кинетического момента и энергии
![]() ,
,
![]() .
.
Дифференциальные уравнения свободного движения твердого тела нетрудно получить, если рассмотреть движение тела как сложное, принимая за переносное движение поступательное с центром масс, а за относительное – сферическое движение вокруг центра масс. То есть к динамическим уравнениям Эйлера необходимо добавить дифференциальные уравнения движения центра масс
![]() ,
, ![]() ,
,
![]() ,
,  ,
,
![]() ,
, ![]() .
.
34) Мгнове́нный центр скоросте́й — при плоскопараллельном движении точка, обладающая следующими свойствами: а) её скорость в данный момент времени равна нулю; б) относительно неё в данный момент времени вращается тело.
Мгновенный
центр скоростей
– точка плоской фигуры, скорость которой
в данный момент равна нулю – Р. Если
тело движется непоступательно, т.е. 0,
то мгн.цент.ск. всегда существует. При
поступательном движении м.ц.с. находится
в .
![]() – скорость любой точки плоской фигуры
имеет модуль, равный произведению
угловой скорости фигуры на длину отрезка,
соединяющего точку с м.ц.с., и направлена
этому отрезку в сторону вращения фигуры.
– скорость любой точки плоской фигуры
имеет модуль, равный произведению
угловой скорости фигуры на длину отрезка,
соединяющего точку с м.ц.с., и направлена
этому отрезку в сторону вращения фигуры.
![]() ,
скорости точек тела пропорциональны
их расстояниям до м.ц.с.
,
скорости точек тела пропорциональны
их расстояниям до м.ц.с.
![]() ,
угловая скорость тела равна отношению
скорости какой-нибудь точки к ее
расстоянию до м.ц.с. Определение положения
м.ц.с.: 1) м.ц.с. – точка пересечения
перпендикуляров, восстановленных к
скоростям точек (напр. в точке В и точке
К); 2) если скорости точек А и В параллельны
между собой и перпендикулярны АВ, то
для определения м.ц.с. должны быть
известны модули и направления скоростей
(см. vA
и vB);
3) если они при этом равны между собой,
то м.ц.с. находится в ,
а угловая скорость =vA/=0;
4) если известно, что скорости двух точек
А и В равны, параллельны и не
перпендикулярны АВ, то м.ц.с. в ,
и угловая скорость =vA/=0,
если это имеет место только к некоторый
момент времени, то имеем мгновенное
поступательное движение; 5) если плоская
фигура катится без скольжения по
неподвижной поверхности, то м.ц.с. плоской
фигуры будет в точке соприкасания.
,
угловая скорость тела равна отношению
скорости какой-нибудь точки к ее
расстоянию до м.ц.с. Определение положения
м.ц.с.: 1) м.ц.с. – точка пересечения
перпендикуляров, восстановленных к
скоростям точек (напр. в точке В и точке
К); 2) если скорости точек А и В параллельны
между собой и перпендикулярны АВ, то
для определения м.ц.с. должны быть
известны модули и направления скоростей
(см. vA
и vB);
3) если они при этом равны между собой,
то м.ц.с. находится в ,
а угловая скорость =vA/=0;
4) если известно, что скорости двух точек
А и В равны, параллельны и не
перпендикулярны АВ, то м.ц.с. в ,
и угловая скорость =vA/=0,
если это имеет место только к некоторый
момент времени, то имеем мгновенное
поступательное движение; 5) если плоская
фигура катится без скольжения по
неподвижной поверхности, то м.ц.с. плоской
фигуры будет в точке соприкасания.
ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ С ПОМОЩЬЮ МГНОВЕННОГО ЦЕНТРА СКОРОСТЕЙ
Мгновенным центром скоростей называется точка плоской фигуры, скорость которой в данный момент времени равна нулю.
Легко
убедиться, что если фигура движется
непоступательного такая точка в каждый
момент времени t существует и притом
единственная. Пусть в момент времени t
точки А и В плоской фигуры имеют
скорости ![]() и
и ![]() ,
не параллельные друг другу (рис.20). Тогда
точка Р, лежащая на пересечении
перпендикуляров Аа вектору га и ВЬ к
вектору vB, и будет мгновенным центром
скоростей так как Vp=0. В самом деле, если
допустить, что Vp=0, то по теореме о
проекциях скоростей вектор Vp должен
быть одновременно перпендикулярен и
АР, (так как
,
не параллельные друг другу (рис.20). Тогда
точка Р, лежащая на пересечении
перпендикуляров Аа вектору га и ВЬ к
вектору vB, и будет мгновенным центром
скоростей так как Vp=0. В самом деле, если
допустить, что Vp=0, то по теореме о
проекциях скоростей вектор Vp должен
быть одновременно перпендикулярен и
АР, (так как ![]() )
и ВР (так как
)
и ВР (так как ![]() ),
что невозможно. Из той же теоремы видно,
что никакая другая точка фигуры в этот
момент времени не может иметь скорость,
равную нулю.
),
что невозможно. Из той же теоремы видно,
что никакая другая точка фигуры в этот
момент времени не может иметь скорость,
равную нулю.
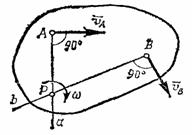
Рис.20
Если теперь в момент времени t взять точку Р за полюс, то скорость точки А будет
![]() ,
,
так как Vp=0. Аналогичный результат получается для любой другой точки фигуры. Следовательно, скорости точек плоской фигуры определяются в данный момент времени так, как если бы движение фигуры было вращением вокруг мгновенного центра скоростей. При этом
 ,
,  и
т.д.
и
т.д.
Из равенств, следует еще, что
![]()
т.е. что скорости точек плоской фигуры пропорциональны их расстояниям от МЦС.