

23. Применение метода циклов в графах связи
Правило циклов позволяет для направленного
графа или стр. сх. записать ПФ м/у любыми
ее входами и выходами. ПФ графа опр-ся
как:
 ,
где
,
где
![]() – опред-ль графа;
– опред-ль графа;
![]() –ПФ
–ПФ![]() -го
пути м/у заданными входом и выходом;
-го
пути м/у заданными входом и выходом;
![]() – опред-ль сокращенного графа, образ-ся
в рез-те исключения пути с ПФ
и вершин, ч/з к-ые этот путь проходит, из
исходного графа.
– опред-ль сокращенного графа, образ-ся
в рез-те исключения пути с ПФ
и вершин, ч/з к-ые этот путь проходит, из
исходного графа.
Определитель графа:
 ,
где
,
где
![]() –
–
![]() -е
произведение ПФ-ий циклов для
циклов графа, взятых из мн-ва незав.
циклов.
-е
произведение ПФ-ий циклов для
циклов графа, взятых из мн-ва незав.
циклов.
Циклом наз-ся замкнутый контур в графе или структурной схеме. ПФ цикла опр-ся как произведение передаточных функций всех звеньев, входящих в цикл. Независимыми наз-ся циклы, не касающиеся друг друга, то есть не имеющие в структурной схеме общих точек.
![]() функция
-го
контура,
функция
-го
контура,
![]() – произведение ПФ-й 2ух не касающихся
друг друга контуров,
– произведение ПФ-й 2ух не касающихся
друг друга контуров,
![]() – произведение ПФ-й 3ех взаимно не
касающихся контуров и т.д.
– произведение ПФ-й 3ех взаимно не
касающихся контуров и т.д.
В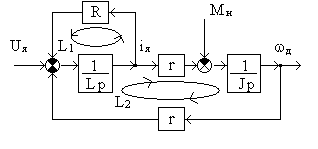 стр. схеме, есть 2 цикла
стр. схеме, есть 2 цикла
![]() и
и
![]() с ПФ:
с ПФ:
 Циклы кас-ся др. др., т.к. имеют общ.
участок, вкл-щий сумматор и звено с ПФ
Циклы кас-ся др. др., т.к. имеют общ.
участок, вкл-щий сумматор и звено с ПФ![]() ,
поэтому опр-ель
,
поэтому опр-ель

Прямой путь от вх. возд-вия
![]() к вых. величине
к вых. величине
![]() проходит ч/з эл-ты с ПФ:
проходит ч/з эл-ты с ПФ:![]() .
ПФ этого пути равна
.
ПФ этого пути равна
 .
Этот путь кас-ся обоих циклов, поэтому
сокращ. граф циклов не имеет. Тогда
.
Этот путь кас-ся обоих циклов, поэтому
сокращ. граф циклов не имеет. Тогда
![]() ,
а ПФ двигателя:
,
а ПФ двигателя:
 .
.
Путь от возмущающего момента нагрузки
![]() опр-ся:
опр-ся:
 .
Этот путь не кас-ся цикла
,
поэтому опр-ль сокращен. графа:
.
Этот путь не кас-ся цикла
,
поэтому опр-ль сокращен. графа:
 ,
а ПФ двиг-ля по возмущению:
,
а ПФ двиг-ля по возмущению:
 .
!!!При исп-нии правила циклов необх-мо
учитывать, что знак ПФ цикла в ГС всегда
отриц., т.к. полустрелки на концах цепочки
связей в цикле всегда направлены в
противопол. стороны. Для опр-ния знака
ПФ пути тоже не обяз-но просматривать
все изм-ния знака в цепочке связей,
дост-но сравнить напр-ния полустрелок
в начале и конце пути.
.
!!!При исп-нии правила циклов необх-мо
учитывать, что знак ПФ цикла в ГС всегда
отриц., т.к. полустрелки на концах цепочки
связей в цикле всегда направлены в
противопол. стороны. Для опр-ния знака
ПФ пути тоже не обяз-но просматривать
все изм-ния знака в цепочке связей,
дост-но сравнить напр-ния полустрелок
в начале и конце пути.
24. Физическая интерпретация элементов и переменных графов связей для электрических и механических систем
Примеры физ. интерпретации элементов ГС для эл. и механических систем
Электрические системы |
Механические системы |
|
Элемент ГС |
Физическое устройство, эффект |
Физическое устройство, эффект |
|
Источник ЭДС |
Источник силы, момента |
|
Источник тока |
Источник скорости |
|
Активное сопротивление |
Вязкое трение |
|
Индуктивность |
Масса, момент инерции |
|
Емкость |
Пружина |
|
Трансформатор |
Редуктор, рычаг |
|
|
Гироскоп |
0-узел |
Параллельное соединение электрических цепей |
Подвижное соединение механических звеньев |
1-узел |
Последовательное соединение элементов |
Жесткое соединение механических звеньев |
Интерпретации переменных графов связей
Перемен-ные связей |
Системы |
|||
Электри-ческие |
Механические поступатель-ные |
Механические вращательные |
Гидравли-ческие |
|
Усилие
|
Напряжение
|
Сила
|
Момент силы
|
Давление
|
Поток
|
Ток
|
Скорость
|
Угловая скорость
|
Расход |
Момент
|
Потокосце–пление
|
Импульс силы
|
Кинетический момент
|
Импульс давления |
Переме-щение
|
Заряд |
Перемеще– ние |
Угол пово– рота
|
Объем
|
Понятие моделирования как процесса. Понятие модели. Основные свойства модели. Адекватность модели. Три основных иерархических уровня моделирования (математического описания).
Классификация методов моделирования по типу модели
Метод математического моделирования. Назначение и характеристики математических моделей. Формы представления математических моделей. Методы проверки адекватности математических моделей
Классификация методов математического моделирования применительно к этапу построения математической модели. Кибернетическое моделирование. Идентификация объекта
Классификация методов математического моделирования применительно к этапу исследования математической модели.
Аналитическое моделирование. Методы исследования аналитических моделей.
Имитационное моделирование. Достоинства и недостатки. Критерии целесообразности применения
Особенности управления и моделирования систем с распределенными параметрами. Общая формулировка закона сохранения
Автоматизированное моделирование
Архитектура программ автоматизированного моделирования
Иерархическое моделирование (проектирование).
Структурное и мультидоменное физическое моделирование
Варианты Data Flow и Control Flow управления процессом структурного моделирования
Классификации методов численного интегрирования
Выбор между явными и неявными методами в процедурах моделирования мехатронных с-м (их достоинства и недостатки)
Многошаговые методы интегрирования
Методы с автоматическим выбором шага
Принципы продвижения модельного времени
Метод графов связи
Моделирование электрических и механических систем на графах связей
Причинность в графе связей
Эквивалентные преобразования графов связей
Применение метода циклов в графах связи
Физическая интерпретация элементов и переменных графов связей для электрических и механических систем