

Введение
САУ угловым движением ЛА состоит из четырех отдельных каналов (автоматов), каждый из которых воздействует на свой орган управления: три канала стабилизации и управления угловым положением и канал управления скоростью. Все три канала управления угловым положением выполнены, как правило, по типовой схеме, изображенной на рис. 1 применительно к угловому движению ЛА.
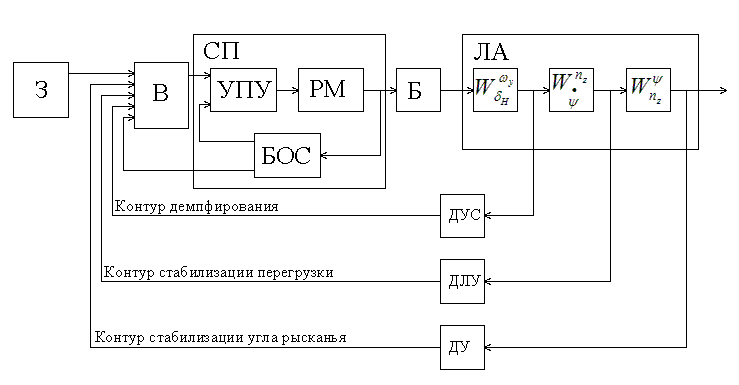
Рис. 1
На схеме представлены следующие элементы: РМ – рулевая машина; БОС – блок обратной связи СП, служащий для реализации желаемого закона АС или улучшения динамических характеристик СП; УПУ – усилительно-преобразовательное устройство; В – вычислитель; З – задатчик; ДПИ – датчики первичной информации; ДУ – датчик угла; ДУС – датчик угловой скорости; ДЛУ – датчик линейного ускорения.
Измерение углов и угловых скоростей поворота ЛА производится обычно с помощью гироскопических приборов, обладающих высоким быстродействием. Поэтому датчики углов и угловых скоростей при исследовании САУ угловым движением ЛА считают обычно безынерционными, ограничиваясь только их статическими характеристиками.
Исполнительные приводы (ИП),
перемещающие органы управления ЛА,
весьма разнообразны по принципу действия,
ввиду используемой энергии, конструкции,
характеристикам. Для исследования
процессов управления в САУ ЛА обычно
задаются моделями ИП, соответствующими
общей структурной схеме, представленной
на рис. 2, где
 - коэффициент усиления разомкнутого
привода (добротность); D(s)
– полином, определяющий инерционные
характеристики рулевой машинки, обычно
принимают D(s)
= 1 для гидравлической РМ,
- коэффициент усиления разомкнутого
привода (добротность); D(s)
– полином, определяющий инерционные
характеристики рулевой машинки, обычно
принимают D(s)
= 1 для гидравлической РМ,
 - для электрической РМ,
- для электрической РМ,
 - для пневматической РМ.
- для пневматической РМ.
 - зона нечувствительности, порог трогания
привода;
- зона нечувствительности, порог трогания
привода;
 - ограничение линейной зоны скоростной
характеристики ИП, обусловленное
конечной мощностью привода и внешней
нагрузкой.
- ограничение линейной зоны скоростной
характеристики ИП, обусловленное
конечной мощностью привода и внешней
нагрузкой.
Если не учитывать нелинейностей
характеристик привода ( ,
, ),
то его передаточная функция будет иметь
вид (для сервопривода с жесткой обратной
связью):
),
то его передаточная функция будет иметь
вид (для сервопривода с жесткой обратной
связью):
 ,где
,где

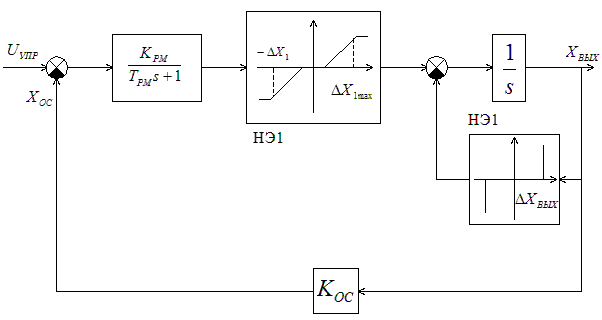
Рис. 2
Задание
Закон управления:
Статический
контур стабилизации ψ, в режиме разворота
с креном γ, СП с ЖОС,
 ,
контур демпфирования ψ, с перекрестной
связью по γ, СП с ЖОС,
,
контур демпфирования ψ, с перекрестной
связью по γ, СП с ЖОС,

Составить структурную схему контура стабилизации угла рыскания, считая, что β = 0. Вывести при β = 0 передаточную функцию контура по отношению к задающему воздействию.
Провести синтез в следующем порядке:
выбрать передаточные числа
 и
и
 ,
исходя из требований к переходному
процессу изолированного контура крена
в режиме управления: (tp)γ
= 2 .. 4 с., ρ
,
исходя из требований к переходному
процессу изолированного контура крена
в режиме управления: (tp)γ
= 2 .. 4 с., ρ
 5%
5%составить структурную схему изолированного контура демпфирования рыскания и выбрать передаточное число
 ,
обеспечивающее декремент затухания
изолированного движения рыскания
,
обеспечивающее декремент затухания
изолированного движения рыскания

выбрать передаточное число
 ,
обеспечивающее скольжение в установившемся
развороте крена
,
обеспечивающее скольжение в установившемся
развороте кренавыбрать передаточное число
 ,
исходя из следующих требований к
переходному процессу в режиме управления
(tp)Ψ
= 6 .. 8 с., ρ
5%
,
исходя из следующих требований к
переходному процессу в режиме управления
(tp)Ψ
= 6 .. 8 с., ρ
5%по полной модели бокового движения при выбранных передаточных числах построить переходный процесс контура рыскания в режиме управления
Проанализировать динамику системы «самолет – САУ» в режиме стабилизации при возмущающем ступенчатом воздействии в виде бокового порыва ветра: W =5 м/с, для чего:
записать систему уравнений и составить структурную схему системы «самолет – САУ» при действии ветрового возмущения
построить переходный процесс по регулируемым координатам в режиме стабилизации при выбранных настройках регулятора; вывод по требованию к точности стабилизации
уточнить (в случае необходимости) настройки регулятора так, чтобы они соответствовали требованиям, как для режима управления, так и стабилизации
Составить структурную и функционально-принципиальную схему спроектированных каналов САУ в классе цифровых САУ
Уравнения бокового углового движения ЛА
Если за опорный (заданный) режим полета принят прямолинейный горизонтальный полет допустимо исследовать боковое движение самолета изолировано от продольного. Упрощенные дифференциальные уравнения, описывающие «быстрое» боковое движение самолета, имеют следующий вид:
 (1)
(1)
Положив β=0, получим:

Статический контур стабилизации заданного угла крена
В канале крена в качестве чувствительных элементов используются гировертикаль и скоростной гироскоп. Сигналы чувствительных элементов и задатчика после суммирования в вычислителе поступают на усилитель и затем на рулевую машинку, которая перемещает элероны.
Функциональная схема канала крена представлена на рис. 3.
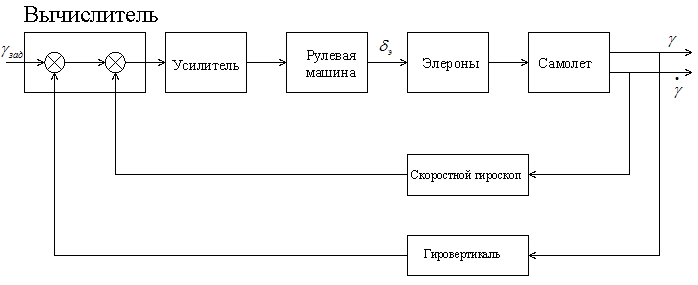
Рис. 3
При
появлении рассогласования
 происходит отклонение элеронов на
величину
происходит отклонение элеронов на
величину
 и возникает момент крена, под действием
которого самолет поворачивается в такую
сторону, чтобы уменьшить величину
.
При уменьшении рассогласования до
определенной величины сигнал обратной
связи становится больше этой величины
и элероны приближаются к нейтральному
положению. В результате этого самолет
постепенно возвращается к положению
и возникает момент крена, под действием
которого самолет поворачивается в такую
сторону, чтобы уменьшить величину
.
При уменьшении рассогласования до
определенной величины сигнал обратной
связи становится больше этой величины
и элероны приближаются к нейтральному
положению. В результате этого самолет
постепенно возвращается к положению
 .
.
Введя
в закон управления сигнал скоростного
гироскопа, и выбрав соответственно
передаточное число
,
можно создать составляющую момента
элеронов, пропорциональную угловой
скорости, которая по своему действию
эквивалентна моменту собственного
демпфирования. Другими словами, вводя
в закон управления сигнал
 ,
мы искусственно увеличиваем демпфирование
самолета, поэтому процесс его движения
к положению равновесия становится
плавным.
,
мы искусственно увеличиваем демпфирование
самолета, поэтому процесс его движения
к положению равновесия становится
плавным.
Сигнал заданного угла крена γзад формируется в вычислителе системы траекторного управления. Реализуем заданный закон управления углом крена: . Расчетная структурная схема автомата стабилизации представлена на рис. 4.
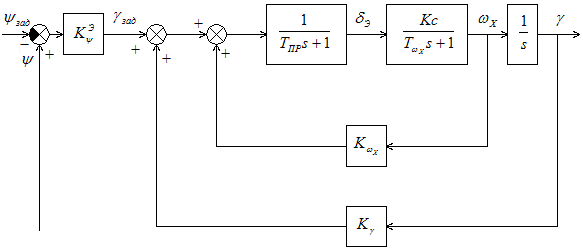
Рис. 4
Здесь и далее, для уменьшения порядка системы, вместо сервопривода с жесткой ОС был выбран апериодический привод=1.
№ |
Н, км |
М |
а, м/с |
ZB,1/с |
M xwx,1/c |
M xB,1/c2 |
Mбе x,1/c2 |
M ywy,1/c |
M yB,1/c2 |
M yбn,1/c2 |
1 |
1 |
0.4 |
336.4 |
-0.2 |
-2.0 |
-22 |
-14.7 |
-0.32 |
-5.9 |
-2.9 |
Математическая модель изолированного движения по углу крена имеет вид:

Примем угол β равным 0.
Тогда после преобразования Лапласа система примет следующий вид:

Отсюда получаем передаточные функции:


Параметры объекта:
 ,
где
,
где

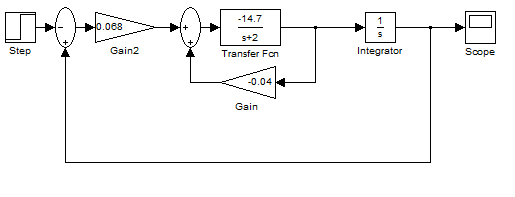
В среде MatLab построили данный контур, в качестве входного приняли единичное ступенчатое воздействие от элеронов.
Получим
передаточную функцию замкнутой системы
 :
:

W γγзад(s)=M δex/[s2-( M ωxx+ M δex*Kωx)*s- M δex*Kγ]
Получим передаточную функцию замкнутой системы W ψψзад(s):
W ψψзад(s)= -M δex*K eψ*(g/v0)/[s3-( M ωxx+ M δex*Kωx)*s2- M δex*Kγ*s+( M δex*K eψ*(g/v0))]
Выбор передаточных чисел и .
Запишем передаточную функцию автомата стабилизации угла крена:
W γγзад(s)=M δex/[s2-( M ωxx+ M δex*Kωx)*s- M δex*Kγ]
Для
обеспечения
заданных условий
 системы управления углом крена в режиме
управления мне необходимо подобрать
коэффициенты:
системы управления углом крена в режиме
управления мне необходимо подобрать
коэффициенты:
 ,
,
 .
.
Выбираем передаточные числа:



Выбираю
ξ=0,707 (соответствующий перерегулирования,
равному 5%) и

Получившиеся результаты:

Система, собранная из блоков среды Simulink, представлена на рис:
Построим ЛАФЧХ системы в среде Simulink:

Запас по амплитуде 69,4.
Результаты моделирования переходного процесса представлены на рисунке

Переходный процесс при данных коэффициентах имеет характеристики:
tпп=4 с
σ=4,1%
Вывод:
Используя метод логарифмических амплитудно-частотных характеристик подобраны коэффициенты , , при которых ЛАЧХ и ФЧХ удовлетворяют требованиям запасов устойчивости по амплитуде и по фазе.
При
выбранных коэффициентах система
удовлетворяет заданным требованиям
(
 ).
).