

Лекция 1
Основные понятия
Системы управления – систематизированный набор средств влияния на подконтрольный объект для достижения определённых целей данным объектом.
Технические объекты управления
Внедрённые системы управления (Integrated system) – объект управления с микропроцессорной системой управления в одно устройство. Например, с устройством «последней мили» (last mile), которая характеризуется удалённостью и тяжестью личного обслуживания персоналом.
Модульный принцип построения систем управления
Опирается на принцип открытой архитектуры, на возможность постоянного совершенствования вычислителя и его отдельных устройств с использованием новых устройств. Т.е. модульная система управления представляет собой совокупность различных электронных устройств, выполненных в завершённом виде. При этом, общая структура систем управления определяется, исходя из требуемых функций управления с использованием готовых модулей. Процесс построения модульной системы управления заключается в процессе интеграции.
Система на кристалле (СНК)
СНК – электрическая схема, выполняющая функции целого устройства управления и размещённая на одной интегрированной схеме. В англоязычной литературе обозначается термином «System on a chip» (SOC).
В зависимости от назначения, она может апеллировать как цифровыми сигналами, так и аналого-цифровыми, а также частотными (вплоть до радиодиапазона). Как правило, применяются в портативных и встраиваемых системах.
Уровни стандартизации модулей
Построение модульных систем управления предполагает использование широкого спектра различных модулей управления, в силу чего, актуальной становится задача стандартизации механизмов взаимоподключения модулей, а, следовательно, их собственность стандартизации.
I уровень – конструктивный уровень стандартизации.
В этом случае стандартизации подвержены механические, тепловые, энергетические характеристики модулей, а также системы охлаждения. Например, линейные технологии COTS, ROTS, MOTS, отличающиеся друг от друга температурой эксплуатации модуля, и его надежностью.
COTS – коммерческие модули, готовые к применению;
ROTS – расширенные модули, готовые к применению;
MOTS – военные модули, готовые к применению;
Другой пример – стандарты Euro Mechanic.
II уровень – на уровне интерфейсов.
Данные стандарты определяют, какие интерфейсы связи и какие их характеристики используются для взаимоподключения модулей, т.е. какие линии и шины используются. Например, VME-bus или Compact-PCI.
III уровень – функциональный.
Определяет исполняемые модулем функции, необходимые для построения системы управления.
IV уровень – программный (аутсорсинг).
Использование данных стандартов обуславливает применение сторонних ресурсов при разработке систем управления. Для этого, чтобы сторонние ресурсы могли быть корректно использованы, они подвергаются стандартизации. Например, стандартные библиотеки на языке С, или механизм использования SD-карт.
Модули жизненного цикла аппаратуры. Прототипирование.
В целом, модели жизненного цикла могут быть представлены двумя типами: последовательностный жизненный цикл (Цикл Боэма), который заключается в том, что каждый из этапов жизненного цикла начинается только после окончания предыдущего. В случае возникновения ошибок, осуществляется переход на тот этап, который привёл к возникновению данной ошибки.
Рисунок 1 – модель последовательностного жизненного цикла. Цикл Боэма.
Лекция 2
Этапы цикла Боэма
Анализ, предназначенный для выявления характеристик требуемой продукции и её функциональности;
Проектирование – создание проектов;
Реализация в виде электронного устройства;
Внедрение;
Эксплуатация и сопровождение.
Данные этапы являются последовательными, т.е. проектирование начинается сразу после окончания анализа. На каждом из этапов возможно обнаружение ошибки, которое приводит к возврату на один из предыдущих этапов. Чем раньше осуществляется обнаружение ошибки, тем меньшее время будет затрачено на производство устройства.
Спиральная модель жизненного цикла
Спиральная модель основана на использовании так называемого прототипа. Частичная функциональная модель устройства, предполагающая её дальнейшее усовершенствование.
Определение требований (написание тех.задания - заказчик)
Анализ (уточнение тех.задания – заказчик с производителем)
Проектирование
Реализация и тестирование
Интеграция (этап построения модульной системы управления)
Внедрение
Рисунок 2 – спиральная модель жизненного цикла.
После внедрения снова начинается этап №1 и так далее, но уже над следующим прототипом. Жизненный цикл заканчивается тогда, когда модификация текущего прототипа уже не требуется.
Внутрисхемное и внутрисистемное программирование
Отличие данного типа программирования в том, что внутри схемы позволяет записывать управляющую информацию в УУ уже смонтированное в виде модулей по специальному, предназначенному интерфейсу программирования.
Внутрисистемное программирование позволяет изменять управляющую информацию через информационный интерфейс. Обычно используем в работе устройства для его функционирования.
Универсальный вычислитель
УВ – вычислитель, предназначенный для широкого спектра функций, определяемого пользователем в процессе работы.
Плюс УВ: гибкость; Минус УВ: высокие аппаратные затраты.
Специализированный вычислитель
Данный вычислитель предназначен для выполнения задачи из узкого класса задач. Это определяет его структуру и характеристики. Специализированные ЭВМ характеризуются упрощённым математическим вычислением, пониженными аппаратными затратами, повышенной точностью и производительностью.
Специализированные ЭВМ характеризуются периодическим повторением всех алгоритмов. Процесс управления характеризуется циклами:
- длительностью цикла управления;
- временем принятия;
В ряде систем длительность цикла управления – это фиксированная величина, ограничение на которую определяет постановщик задачи и алгоритмист.
Например, в среде step7 длина цикла по умолчанию = 10 мсек, после истечения которых управляющая программа будет повторена (в противном случае будет выявлена ошибка).
Соотнесение принципов специализации и универсализации
Данные принципы являются противодействующими. Процесс универсализации предполагает включение в состав вычислителя максимально широкого набора функциональных модулей и максимализации их характеристик.
Принцип специализации предполагает максимальное соответствие вычислительного устройства неизменному требованию потребителя.
Универсальные вычислители позволяют создавать гибкие, многофункциональные системы управления, предполагающие простоту их модернизации, однако, данные вычислители будут характеризоваться:
Высокой стоимостью
Большими аппаратными затратами
Проблемами тактико-технического обеспечения (например, напряжение питания)
Худшей надёжностью
Принцип специализации позволяет строить:
Дешёвые устройства
Устройства, обладающие минимальными аппаратными затратами на их создание
Максимальной требуемой производительностью
ОДНАКО!
Специализированные вычислители является не гибкими – они предназначены лишь для единственной задачи, и сфера их применения ограничена ею.
Используемый принцип выбирается в зависимости от цели эксплуатации устройства, интенсивности, изменения данных целей и характеристик производства.
Промежуточным классом между специализированным и универсальным вычислителем для управления производством являются программируемые логические контроллеры (ПЛК/PLC).
ПЛК – специализированное компьютерное устройство, предназначенное для автоматизации технологических процессов. ПО ПЛК может быть изменено в определенных рамках с помощью внутрисистемного программирования.
В отличие от компьютеров общего назначения, ПЛК имеет развитые устройства ввода-вывода сигнальной информации. ПЛК предназначены для длительной работы без дополнительной работы без дополнительного обслуживания, а также работы в неблагоприятных условиях окружающей среды.
ПЛК, как правило, не оснащаются механизмами машинного интерфейса (нет клавиатур и дисплеев).
ПЛК характеризуется:
Использование в составе интегрированных систем управления
Определённой универсальностью
Функциональной законченностью
Возможностью внутрисистемного программирования
Лекция 3
Иерархия уровней управления. Пирамида управления.
Рисунок 3 – иерархия уровней управления.
Иерархия уровней управления предполагает наличие 4х уровней, которые можно определить формально названиями исполняющих функций.
Самый верхний уровень - директор обладает минимальным объёмом обрабатываемой информации и максимальной ответственностью за принятие решения (представлен людьми);
Технологи – лица, осуществляющие подготовку производства, оперируют большим количеством информации (представлен людьми);
Операторы (серверы) – информации ещё больше. (представлен и людьми и аппаратурой)
Исполнительные механизмы – только аппаратура, которая обладает максимальной информацией;
Решаются:
стратегические задачи управления
тактические задачи управления
уровень (задачи) управления
Особенности промышленных ИУС.
Распределённость ИУС (пространственная распределённость);
Иерархичность системы ИУС (заключается в том, что различные уровни управления будут реализованы по-разному);
Гетерогенность систем и интерфейсов (заключается в использовании различных модулей и ЭВМ, в различных местах ИУС);
Сравнительно низкое быстродействие;
Иерархическая структура использования интерфейсов
Рисунок 4 – Иерархия ИУС.
1 уровень – персональные ЭВМ, которые соответствуют директорскому уровню управления; используемые на этом уровне интерфейсы – радиоканальные и Ethernet, в дальнейшем с помощью моста преобразуются в интерфейсы 2 уровня - уровня локальной сети предприятия (чаще всего промышленный Ethernet (своя аппаратура, свои кабель каналы)).
К промышленным Ethernet подключают ПЭВМ.
С помощью следующего моста формируется сеть 3 уровня – промышленная сеть (промышленный Ethernet) – подключаются ПЭВМ, ПЛК и блок HMI (человеко-машинный интерфейс), составляющие 4 уровень.
На 5 уровне иерархии используется так называемая полевая шина – интерфейс, предназначенный для подключения промышленных устройств, характеризующаяся следующими характеристиками:
Высокая протяжность;
Многоабонентность;
Высокая помехоустойчивость;
Гарантия работы;
Принципы построения симметричных и несимметричных линий связи
Несимметричная линия связи (небалансные) реализуется на основании использования линий «общий провод». Для передачи информации используется по одному проводнику на каждый сигнал, воздействуя внешне, электромагнитная помеха создаёт на данном проводнике ЭДС-помехи, которые формируют напряжение помехи на сопротивлении приёмника.
Рисунок 5 - Реализация несимметричной цепи.
Преимущества несимметричной линии:
простота схемотехнической реализации;
экономное использование линий связи;
Недостатки несимметричной линии:
низкая помехоустойчивость, и, следовательно, низкая протяжённость интерфейса;
Например, интерфейс RS-232.
Симметричная цепь (балансная) основана на организации кольца из проводников. Для передачи одного сигнала используется 2 линии связи, замыкаемые в кольцо, в простейшем случае трансформаторами. В этом случае сигнал передаётся по двум, расположенным рядом проводникам. Под воздействием электромагнитной помехи, в них создаётся одинаковые, но разнонаправленные ЭДС, т.е. сумма токов помехи в кольце интерфейса примерно равна 0. Таким образом, данная реализация интерфейса более помехоустойчива.
Рисунок 6 - Реализация симметричной цепи.
Устройства преобразования балансных в небалансные (и наоборот) – балун (красный или синий, в зависимости от того, что и во что преобразовывает).
Преимущества:
Высокая помехоустойчивость;
Значительная протяжённость;
Недостатки:
Сложность аппаратной реализации;
Удвоенное количество линий связи;
Сложность организации многоабонементности;
Использование трансформаторов с одной стороны приводит к гальванической изоляции друг от друга передатчика от приёмника, а с другой создаёт проблемы при реализации многоабонементности, в силу чего используются в реальных промышленных сетях не трансформаторы, а резистивные терминаторы (для уменьшения отражений в интерфейсе данных).
Например, Ethernet (использование трансформаторов), а также RS-485 (использование резистивных терминаторов).
Реализация симметричных линий связей в RS-485
Рисунок 7 - Реализация симметричных линий связи в RS-485.
Используется активный терминатор, в котором присутствует 3 резистора, соединённых сигнальными линиями, общим проводом и проводом напряжения питания. В ряде случаев (иные интерфейсы), резисторы, подключённые к напряжению питания и общему проводу, могут отсутствовать.
Преимущества:
Высокая помехозащищённость
Простота реализации многоабонентности
Малое число линий связи
Недостаток: отсутствие гальванической изоляции абонентов сети.
Логическая реализация интерфейса USB

Рисунок 8 - Логическая реализация USB.
Логическая реализация интерфейса CAN
Балансные линии связи. Мультимастерность: все абоненты сети являются активными устройствами. Конфигурационная гибкость: идентификации пакетов с помощью 11-битных, или 29-битных адресов. Неразрушающий арбитраж доступа к шине.
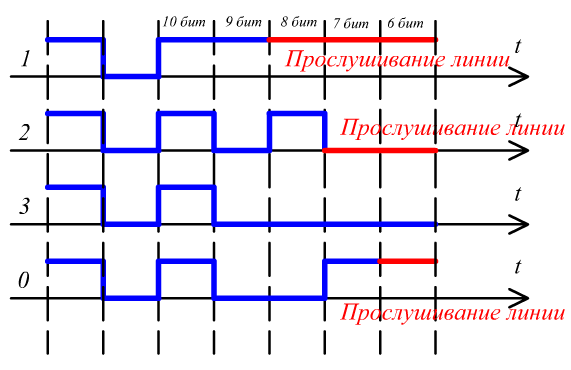
Рисунок 9 - Механизм неразрушающего арбитража.
На рисунке показаны принципы голосования 3х пакетов сети (линии 1, 2, 3) – это та информация, которая выдаётся устройством, однако на общей линии связи (линия 0) будет обобщение сигналов по принципу монтажного «И». Таким образом, доступ к сети получает абонент, имеющий минимальный адрес.
Логическая реализация интерфейса PROFI-bus
Интерфейс предложен фирмой Siemens для организации полевых шин. Все устройства делятся на активные (master) и подчинённые (slave). Право активизировать процесс передачи принадлежит master-устройству, обладающему токеном. Все master-устройства связаны в кольцо передачи токена. В каждый момент времени идёт только одна информационная транзакция. В том случае, если master-устройство захочет получить или передать данные slave-устройству, оно должно предварительно передать ему соответствующую команду, в данной сети регламентируется время удержания маркера, активным master-устройством. В случае превышения этого времени master-устройство признаётся за неработоспособное, и исключается из кольца маркера.
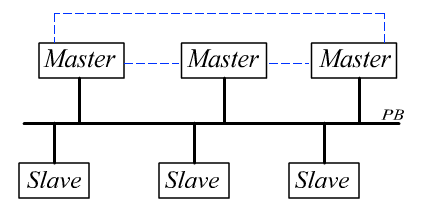
Рисунок 10 - Механизм передачи маркера в PB.
Способы подключения датчиков
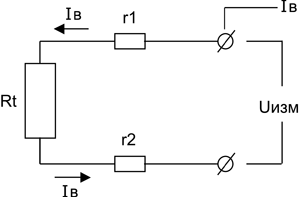
Рисунок 11 - Двухпроводная схема подключения датчиков.
Двухпроводная схема
Преимущество – простота реализации
Недостаток – влияние на измеренную информацию характеристик проводов подключения.
Для минимизации влияния проводов подключения используется трёхпроводная схема, в которой один из проводов, идентичный двум оставшимся, используется для определения их влияния.
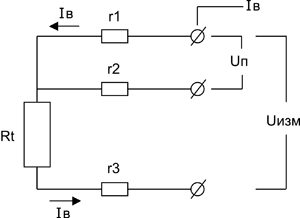
Рисунок 12 - Трёхпроводная схема подключения датчиков.
Четырёхпроводная схема – позволяет осуществить изменение отклонения параметров датчика от устройства, установленного эталона. Это так называемая мостовая схема, на которую подаётся напряжение питания, а с которой снимается парафазный (дифференциальный) сигнал, пропорциональный характеристике одного из элементов моста.
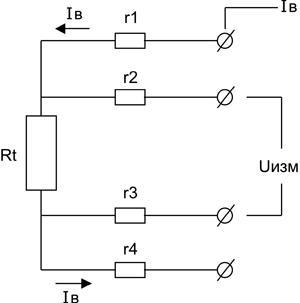
Рисунок 13 - Четырёхпроводная схема подключения датчиков.
Рисунок 14 - Активная и реактивная мостовые схемы.
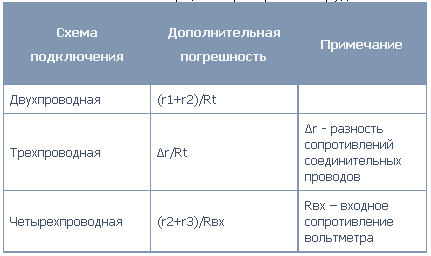
Рисунок 15 - Свойства различных способов подключения датчиков.
Лекция 4
Виды программного обеспечения (контактный план, язык Graph)
Парадигмы управления современной техникой.
Парадигма управления «программирование в контактном плане» (программы на языке лестничных диаграмм)
Программа представляет из себя электрическую схему, принятую в европейской и американской традиции, которая состоит из таких элементов, как:
- нормально разомкнутый ключ (нормально открытый контакт) (две вертикальные линии, например, I 124.5 (Input) - РИСУНОК 16) означает, что в неактивном состоянии (записанный в памяти логический 0, или сигнал логического нуля) контакты данного ключа разомкнуты, иначе (когда логическая 1) – контакты замкнуты.
- нормально замкнутый ключ (I 124.1 – РИСУНОК 16). Внешний вид аналогичен нормально разомкнутому ключу, однако изображение перечёркнуто (в случае логического 0 контакты замкнуты, в случае логической 1 – разомкнуты).
- выходная катушка (например, q124.0 – РИСУНОК 16). В случае записи 1, она выдаётся в бит памяти, или на внешние контакты контроллера. Если через катушку протекает ток в бит памяти или выходную линию, записывается логическая 1, иначе – логический 0.
- выходная катушка с триггером, например, М01 в первой сети программы (РИСУНОК 16). Символ S означает, что катушка оснащена S-триггером (Set – установка в единицу). Также установка может быть в 0; в этом случае тип катушки – R (Reset).
- элемент инверсии (not во второй сети – РИСУНОК 16).
- элемент выделения импульса (восходящего фронта)
- элемент P в первой сети – РИСУНОК 16. Требует для организации своей работы бит памяти (М00). Данный бит памяти нигде в программе более использоваться не должен. В случае нисходящего фронта, элемент обозначается буквой N.
Данные элементы в случае возникновения изменения входного сигнала формируют кратковременный импульс на выходе.
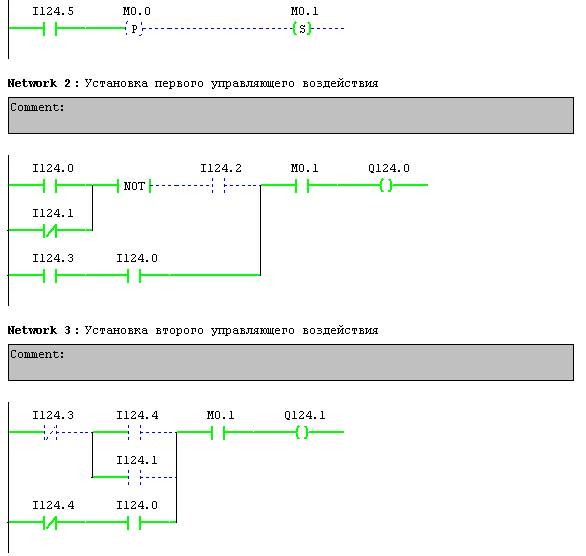
Рисунок 16 - Программа логических функций в контрактном плане
Ряд более функциональных элементов, таких как: таймеры, счётчики, элементы арифметических операций и т.д.
Шина-источник виртуальной электроэнергии- вертикальная линия, расположенная на самом левом краю схемы.
Линия-приёмник электроэнергии – линия, расположенная на крайнем правом краю схемы (на рисунке 16 не показана, т.к. ряд систем программирования её не отображают).
Программа организована в виде совокупности независимых и исполняемых параллельно друг другу сетей. Название это (сеть) следует из математической терминологии, т.е. ориентированный граф выделенным набором входов и выходов, таким образом, используемые сети имеют 1 или несколько входов и несколько выходов (рисунок 16). На рисунке 16 также показана работа симулятора данной программы: зелёным цветом выделены линии, по которым протекает сигнал логической 1, а синим пунктиром – логического 0. В том случае, если существует замкнутый путь для виртуальной электрической энергии между шиной-источником и шиной-приёмником протекает «электрический ток» (логическая 1), который приводит к записи 1 в выходной катушке, которая в сети может быть только одна. В программе применяются следующие аббревиатуры данных:
I – Input – сигнал, приходящий с клеммной колодки ПЛК
M- memory – сигнал с бита данных
Q – quit – сигнал выходной катушки (выходной клеммной колодки ПЛК), а также
PIW – peripheral input word - сигнал, получаемый АЦП ПЛК
PQW – peripheral quit word - сигнал, передаваемый на ЦАП ПЛК
Следует отметить, что схема, приведённая на рисунке 16 является ПРОГРАММОЙ, которую в дальнейшей пошагово исполняет ПЛК. Однако, небольшая скорость исполнения процессов управления даёт возможность рассматривать исполнение сетей программы как параллельное.
Примеры программ на сайте http//kardashdi.narod.ru – СРС!!!!
Используются в ПЛК, в умном доме, в автоматизации помещений (европейский стандарт, широкое применение)
Парадигма автоматного программирования. При этой парадигме программа создаётся в виде Сети Петри, состоящей из множества состояний (места), содержащих в себе указания исполняемых действий в том случае, если в данном элементе находится фишка исполнения и переходов, которые показывают направление переходов между местами.
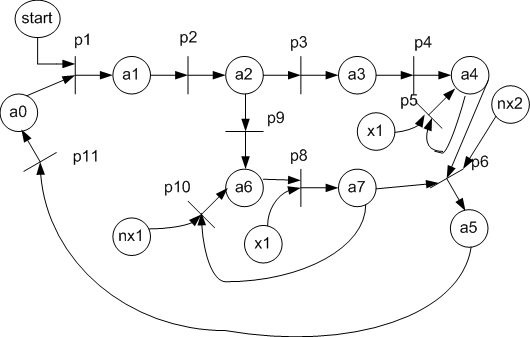
Рисунок 18 - Пример сети Петри.

Рисунок 19 - Программная реализация Сети Петри на языке Graph.
Множество мест или состояний программы задано в виде набора S1-S2-S3. Каждому состоянию соответствует момент действий (таблица, связанная с вершиной), в которой описывают действия (S – установка в 1, R – установка в 0, N – формирование среза, P – фронта и т.д.) над битами памяти или выходными линиями, например: на первом шагу будет установлен бит M0.1 –первый бит нулевого байта. Нумерация идёт с нуля. На втором шаге бит М0.1 сбрасывается, а бит М0.2 – устанавливается.
Условия переключения активности с одного состояния на другое задаётся переходами Т1-Т2-Т3, которые, в отличие от классической Сети Петри, имеют дополнительные входы разрешения перехода, на которые подаётся сигнал, разрешающий проход фишки через переход (например, в том случае, если фишка находится в состоянии С1 и на вход Input 124.0 приходит сигнал логической 1, переход Т2 открывается, и фишка переходит с С1 на С2) (см. рисунок 19).
Способы построения систем обработки данных (СОД)
2 способа:
- с использованием аналогового мультиплексирования (см. рисунок 20)
- с использованием цифрового мультиплексирования (см. рисунок 21)
Рисунок 20 – аналоговое мультиплексирование. Рисунок 21 – цифровое мультиплексирование
1 СОД – аналоговый мультиплексор
При аналоговом мультиплексировании поступающие аналоговые сигналы подаются на единственное АЦП через аналоговый мультиплексор.
Преимуществом данной системы является то, что требуется только 1 АЦП.
Недостатками являются зависимость схемы от характеристик аналогового мультиплексора и низкая производительность данной СОД за счёт того, что в каждый момент времени измерение идёт лишь по одному каналу.
Несмотря на недостатки, данная СОД является более наиболее популярной.
2 СОД – СОД с использованием цифрового мультиплексора
Предполагает наличие нескольких АЦП, по одному на каждый измеряемый канал. Сигналы от АЦП через цифровой мультиплексор передаются на управляющий микроконтроллер.
Преимущества:
Высокая скорость работы за счёт того, что в каждый момент времени идёт обработка информации одновременно по всем каналам
Отсутствует зависимость от характеристик мультиплексора, потому что происходит переключение цифровых сигналов.
Недостаток: Высокие аппаратные затраты на реализацию набора АЦП
Временные характеристики канала аналогового входа/выхода
Время преобразования информации по одному каналу
Количество каналов
Время установления адреса канала
Время переключения ключа (мультиплексора) зависит от типа ключа, типа СОД и типа подключенной нагрузки в виде источника информации, её ёмкости
Время осуществления контроля и диагностики канала. По тем или иным характеристикам снятой информации мы можем судить о тех или иных событиях нарушения в источниках информации. Например, равенство 0, или равенство максимальному значению = короткое замыкание на землю, или на напряжение питания, высокий уровень помех обычно соответствует обрыву земляной шины, и т.д.
Временные характеристики выходной
линии
Рисунок 22 - Переходной процесс установления выходного значения.
На рисунке Ti – время между T1 и T2- время, затрачиваемое на установку параметров ЦАП.
Ts – время между T2 и T3 – время установления параметра, т.е. время, за которое затухают возникающие после переключения ЦАП колебания выходного сигнала.
Лекция 5 Понятия SCADA систем
Понятие и основные функции SCADA систем.
SCADA система – система управления производственными технологическими линиями. SCADA система предназначена для организации процесса управления и сбора необходимых данных.
В качестве функции SCADA систем следует отметить отказ от действий профессионального программиста и создание программного интерфейса управления с помощью визуального программирования, шаблонов, и других средств SCADA систем. SCADA система работает в двух режимах:
Создание SCADA систем. Процесс протекает в виртуальном времени и предназначен для разработки SCADA систем.
Исполнение. Заключается в функционировании созданной в первом режиме SCADA системы. Процесс протекает в реальном времени.
SCADA система является как инструментальным ПО, так и средой для осуществления работы созданных систем управлении.
SCADA система состоит из объектов трёх уровней:
Уровень персональных компьютеров, на которых и установлено ПО SCADA системы;
Уровень интерфейса, предназначенный для обмена необходимой информацией;
Уровень ПЛК
Каждый из уровней представляет из себя множество объектов.
Структура SCADA систем и назначение основных блоков
Рассматриваем SCADA-систему на основании технологии Siemens. SCADA-система WinCC (Windows Control Center).
Программная часть SCADA-системы, состоящая из WinCC, и приложений Windows расположена на персональной ЭВМ, которая, с помощью специальной аппаратуры, подключается к одной из существующих полевых шин (Спец.аппаратура – плата расширения или внешний адаптер). Полевая шина предполагает подключение к ней группы ПЛК.
Программа –> Шина –> ПЛК.
WinCC состоит из следующих блоков:
Набор редакторов, предназначенных дл создания SCADA систем. Используется в виртуальном времени.
Менеджер данных, предназначенный для организации обмена информацией и работы, созданной в редакторе SCADA системы. Блок работает в реальном времени.
База данных, предназначенная для сохранения информации, полученной в процессе управления. БД используется как в реальном, так и в виртуальном времени.
Приложения Windows содержат в себе различные пакеты, такие как: excel, word, access, или разработанные пользователем.
Уровни подключения приложения windows опираются на использование следующих программных интерфейсов:
Интерфейс OLE. Данный интерфейс работает в блоках редакторов в виртуальном времени. Интерфейс используется человеком для организации взаимодействия набора редакторов с приложениями Windows для создания SCADA систем.
ODBC (SQL). Предназначен для организации интерфейса к базе данных.
DDI. Dynamic Data Exchange. Предназначен для обмена приложениями windows с менеджером данных в режиме реального времени.
Блок редактора обычно включает в себя следующие компоненты:
Графический редактор. Предназначен для создания мнемосхем управления, описывающих процесс управления, и предназначенных для организации работы оператора. Данный редактор представляет из себя аналог векторного графического редактора с возможностью обращения к системе программирования.
Редактор двигателей сценария, который описывает программные действия для обработки событий, происходящих в созданной мнемосхеме (например, нажатие кнопки). По умолчанию, в редакторе сценариев могут быть использованы шаблоны программ, т.е. работа программиста в SCADA системе минимизирована. Формально скрипты пишутся языке Borland C, однако, создатель SCADA системы может его и не знать.
Редактор особых ситуаций (редактор аварийных ситуаций) предназначен для описания действий, выполняемых в особых ситуациях: выход уровней сигналов из нормального диапазона, создание аварийных ситуаций, и т.п.
Редактор тэгов. Тэги – области памяти в ПЛК, предназначенные для передачи информации. Это поименованные области.
Редактор архивов. Предназначен для создания структуры, содержащей измеренную информацию. Архив не предполагает сокращения объёмов. Редактор многоязыковой поддержки.
Однопользовательский вариант использования SCADA систем.
Предполагает наличие одного или нескольких ПЛК и связанной с ним через полевую шину единственной SCADA системы. То есть, управление происходит с одного рабочего места, от одного оператора.
Рисунок 24 - Однопользовательский вариант использования WinCC.
Клиент-серверный вариант использования SCADA системы.
Предполагает наличие нескольких рабочих станций, служащих для организации действий нескольких разнородных операторов. Рабочие станции оснащены всеми необходимыми техническими средствами для организации связи с человеком-оператором. Клиент-сервер предполагает наличие сервера SCADA системы (или серверов), которые осуществляют основное управление группы ПЛК. В случае нескольких серверов они могут содержать в себе различные SCADA системы. С одной стороны сервер SCADA системы подключается через интерфейс к рабочим станциям (обычно Ethernet). С другой стороны, через полевую шину к ПЛК.
Рисунок 25 - Клиент-серверный вариант использования WinCC
Организация резервирования серверов WinCC
Сервера WinCC могут быть подвергнуты горячему резервированию. В этом случае, для каждого сервера может быть использован только 1 резервный сервер, который управляется точной копией SCADA системы основного сервера. SCADA системы являются синхронизированными между собой с помощью пересылки специальных пакетов синхронизации. В том случае, если один из серверов не получает такой пакет, то второй сервер объявляется отказавшим. Если отказал основной сервер, то функция по управлению ПЛК начинает исполнять резервный сервер.

Рисунок 26 – горячее резервирование.
ПЛИС
Место программатора в использовании современных микропроцессоров и микроконтроллеров.
Рисунок 27 - Место программатора при построении систем управления.
При программировании рассматриваются следующие функциональные блоки:
Персональный компьютер (ПК) предназначен для построения программируемой информации (программа или конфигурация ПЛИС) предназначена для исполнения инструментальных средств программирования.
Аппаратура программирования (программатор). Является промежуточным звеном для передачи информации с уровня персонального компьютера.
Запоминающее устройство (ЗУ). Предназначено для хранения программы или конфигурации проекта.
Объект управления, использующий информацию из запоминающего устройства.
Технология краевого сканирования корпорации JTAG.
Презентация по стандарту JTAG есть на сайте kardashdi.narod.ru
Стандарты корпорации JTAG под названием интерфейс краевого сканирования (в просторечье – стандарт JTAG) опирается на внедрении внутрь интегральных схем сдвиговых регистров. Информация на которые поступает в сходов и выходов интегральной схемы. Кроме этого, микросхемы комплектуются специальными контроллерами интерфейса краевого сканирования, которые ведут обмен через интерфейс TAP. Интегральные схемы, оснащены е контроллером JTAG в рамках печатной платы связываются в информационное кольцо по интерфейсу TAP. Т.е. все микросхемы могут быть подключены к единственному TAP. Интерфейс TAP в полном варианте содержит 5 полных линий. В настоящее время идёт разработка аналогового стандарта JTAG. Т.е. оперируем не только цифровыми, но и аналоговыми данными.
Функциональное назначение JTAG
Тестирование работы цифровых устройств и осуществление их контроля и диагностики.
Наиболее часто используемая функция JTAG – программирование цифровых устройств
Основные понятия ПЛИС и ПАИС.
ПЛИС – программируемая логическая интегральная схема, состоящая из готовых функциональных блоков, созданных при разработке ПЛИС. При использовании ПЛИС, разработчики (пользователь) осуществляет программирование (не корректный термин, но используемый) интегральной схемы, или её конфигурацию из готовых функциональных блоков, входящих в её состав.
В случае логических интегральных схем, функциональные блоки в составе ПЛИС – цифровые. В случае аналоговых схем – аналоговые. Внутренняя структура ПЛИС и ПАИС принципиально отличаются друг от друга. Общее у них только то, они изготовлены в виде интегральной схемы и имеют интерфейс JTAG.
ПЛИС могут быть как перепрограммируемыми (внутренняя конфигурация которых может быть изменена пользователем) и полузаказные (внутренняя структура которых создаётся при изготовлении микросхем – пользователь может осуществить разработку конфигурации, которая в дальнейшем передаётся заводу-изготовителю интегральных схем, и на основании которых изготавливается неизменное устройство).
Следует отметить существующий в настоящее время отход от привычного схемотехнического плана построения устройств. Современные устройства конфигурируются преимущественно с использованием языков описания аппаратуры, чаще всего в виде создания поведенческих моделей.
Лекция 6 Системы на кристалле (СНК)
В том случае, если существующая функциональность недостаточна, то систему реализуют в виде нескольких интегральных схем. Системы на кристалле (СНК) потребляют меньше электроэнергии, имеют меньшую стоимость и работают надёжнее, чем микроконтроллеры той же функциональности. А также будут иметь более высокую надёжность. В современных интегральных схемах самую малую надёжность имеют входы-выходы (ножки). Т.е. чем больше интегральных схем, тем больше паяных соединений, тем ниже надёжность. Меньшее количество корпусов интегральных схем упрощает монтаж. В качестве элементной базы СНК, как правило, используются микросхемы ПЛИС.
Языки описания аппаратуры (hdl)
Языки описания аппаратуры предназначены для текстового описания структуры и функциональности аппаратных проектов, и могут применяться в любых областях разработки аппаратуры, но чаще всего используются для конфигурации ПЛИС. Существует большой набор различных языков описания. Специфичных для фирм-производителей интегральных схем, и универсальных (оговоренными мировыми стандартами). В ходе проектирования, описание, полученное на HDL, преобразуется в набор точек соединения в микросхеме ПЛИС, что в свою очередь, создаёт требуемую функциональность интегральных схем. В настоящее время меняется стиль создания аппаратуры, которая происходит в виду языкового описания функциональности, а не в виду электрических принципиальных схем.
Использование электрических принципиальных схем происходит в трёх видах:
Построение схем конфигурации ПЛИС. Подобные действия происходят при оптимизации проекта.
Взаимоподключение блоков, описанных на HDL.
Схема использования ПЛИС (от схемы Э3 до печатной платы).
В качестве примера, рассмотрим использование языка VHDL.
VHDL – very high speed HDL. Язык, определённый международным стандартом IEEE-1076 от 2002го года, и отечественным стандартом ГОСТ Р50-754-95. Язык был создан в 1983 году по заказу Министерства Обороны США для формирования логического описания логических схем. В настоящее время является одним из нескольких универсальных языков, применимых для всех ПЛИС. Формально, язык имеет аналогию с языком Ассемблер, в то время как иные универсальные HDL построены по аналогии с иными языками, например, С. VHDL основан на любимом языке мин.обороны США – ADA. Спектр языков широк, каждый может писать те языки, какие хочет, но VHDL – наиболее системный.
Типы описаний на языке VHDL.
Существует 3 вида описаний на языке VHDL:
Структурное;
Потоковое;
Поведенческое.
Структурное (регистровое) описание;
При нём архитектура проекта представляется в виде иерархий связанных компонентов, каждый экземпляр компонента представляет часть проекта, которая, с другой стороны, может быть описана объектом другого уровня иерархии, и т.д.
Потоковое описание (dataflow description);
Архитектура представляется в виде множества параллельных регистровых операций, каждый и которых управляется специальными сигналами для потокового описания. Часто используется язык графического описания RTL, который представляет разработку в виде набора регистров и систем управления ими. Описание конфигурации аппаратуры может быть получено из других типов описания (автоматических).
Поведенческое описание (behavior description).
Определяет функционирование устройств без определения его структуры. Например, один из разработчиком может детально специфицировать поведение системы, а проработка деталей может осуществляться другим проектировщиком.
При описании цифровой аппаратуры, программа VHDL, состоит из 5 типов, из которых наиболее часто используются первые два.
Объявление объекта проектом (сущность проекта). Entity (сущность) – словом VHDL. Представляет собой описание компонента проекта, имеющего чётко заданные входы и выходы, и выполняющую чётко определённую функцию (содержит константы проекта, и описание входа и выход)
Архитектурное тело. Служит для описания структуры или поведения разрабатываемого объекта.
Объявление конфигураций. Предназначено для описания того, какие объекты используется для создания полного проекта.
Объявление пакета. Представляет собой указания пакетов, содержащих наиболее часто используемые функции. Пакеты эквиваленты набору типовых функций в языках программирования.
Тело пакета. Если пользователь использует нестандартные операции или функции, их интерфейс указывается в объявлении проекта, а исполнение функций описывается в теле проекта.
Типы используемых библиотек
Библиотека проекта (Design library) – включает в себя все разработанные и подключенные модули. Библиотека определяется именем. Каждое из описаний является самостоятельной конструкцией языка VHDL и может быть независимо проанализировано анализатором, и имеет название «модуль проекта» (Design unit).
Рабочая библиотека – библиотека, в которой в данном сеансе работает пользователь, и в которую помещается библиотечный модуль, полученный в результате анализа модуля проекта.
Библиотека ресурсов – библиотека, содержащая библиотечные модули, ссылка на которые имеется в анализируемом модуле проекта.
В тексте VHDL должны быть указаны все используемые библиотеки и их компоненты и используемые модули этих библиотек. Можно использовать всё – «.all»
Первая часть программы – это библиотеки. Все предложения языка VHDL заканчиваются «;».
Library use *библиотека*
--вот так обозначаются комментарии, в конце не нужно ставить «;»
Блок сущности (entity) – начало большого предложения языка, заканчивается «end *имя*». И только после «end» - «;». Сущность состоит из 2х частей: Generic ((параметры) – содержат переменные, используемые в процессе препроцессинга. Константа используется только в процессе компиляции.)
Generic (*параметр*);
Порты – сдержат описания портов входа и выхода
Port (*описание портов*);
Описания, заключённые в скобки могут быть многострочным.
Лекция 7