

5. Физическая сторона задачи. Матрица жесткости системы
На основе закона Гука устанавливают связь между усилиями и деформациями. Искомые усилия – это моменты М в рассматриваемых сечениях, а деформации - углы поворота каждого из этих сечений. Эта связь устанавливается на основании закона Гука и может быть представлена в виде
Мn
= кn![]() ,
( 12.4 )
,
( 12.4 )
Мn и кn – векторы момента и матрица жесткости в n – ом стержне
Эту связь легко установить, если помнить о характере и величине моментов от единичных воздействий на балку, приведенных в таблице на стр.42-43.
10
2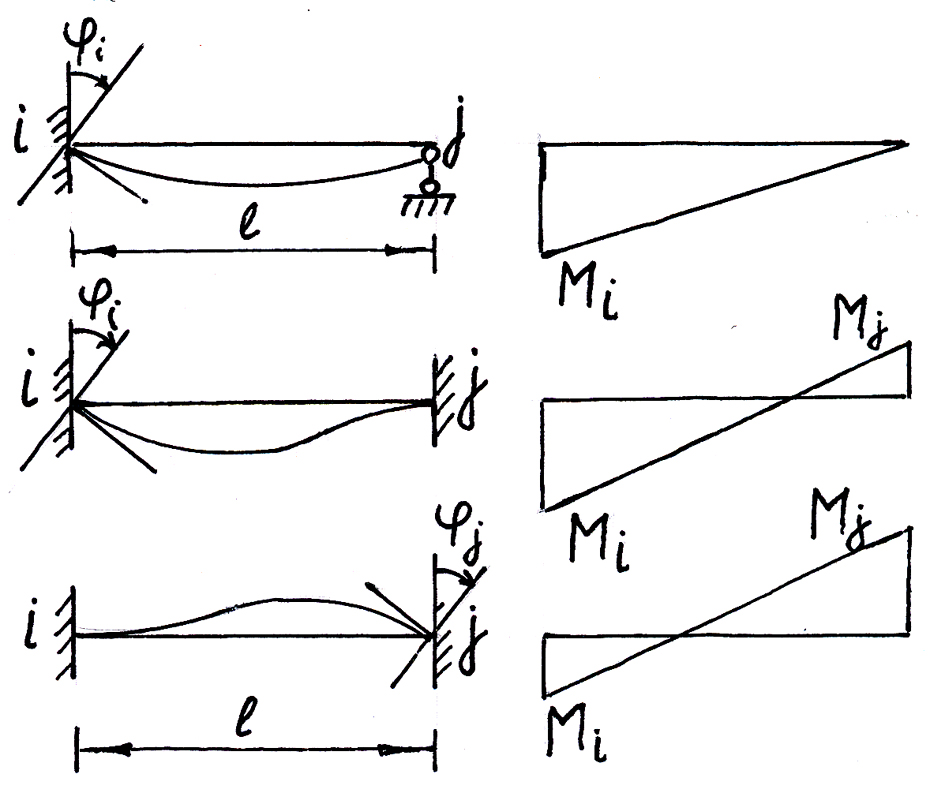
а) Стержень с одним заделанным и другим шарнирно опертым краем (рис.4.9а).
Мi =
![]() .
( 13.4 )
.
( 13.4 )
Следовательно, коэффициент жесткости кi равен
кi =
![]() ( 14.4 )
( 14.4 )
б) Балочный элемент с заделанными краями (рис.4.9б)
Опорные моменты Мi и Мj можно получить, Рис.4.9
Суммируя моменты от поворота сечения
i на угол
![]() ,
а сечения j на угол
,
а сечения j на угол
![]() .
.
Мi =
![]()
![]() ,
( 15.4 )
,
( 15.4 )
Мj =
![]()
![]() ( 16.4 )
( 16.4 )
В матричной форме можно записать
Мn = [ Mi
Mj]Т
=
![]() , т.е. кn
=
, т.е. кn
=
![]() ( 17.4 )
( 17.4 )
Если система (рама) состоит из нескольких стержней, то эта зависимость может быть представлена так:
Мi = к , (18.4)
Мi = [ M1 M2 Mm ] – вектор моментов в сечениях m,
=[![]()
![]() …
…![]() ]
– вектор деформаций (поворотов) этих
сечений,
]
– вектор деформаций (поворотов) этих
сечений,
к– матрица жесткости всех элементов системы (ее называют и матрицей внутреннейьжесткости).
При последовательной нумерации концевых сечений всех элементов матрица к оказывается квазидиагональной, на главной диагонали которой располагаются матрицы жесткости отдельных элементов.
к =
 ( 19.4 )
( 19.4 )
Матрица к– квадратная, симметричная относительно главной диагонали, а порядок ее равен числу искомых моментов (расчетных сечений).
Составим матрицу жесткости в рассматриваемом примере. Вначале запишем матрицы для каждого элемента в отдельности.
кАВ =
![]() ,
( 20.4 )
,
( 20.4 )
так как элемент АВ в основной системе (рис.2) – это стержень с двумя заделанными краями.
Остальные элементы – стержни с одним заделанными и другим шарнирно опертым краем. Поэтому
кВС
![]() кВЕ =
кВЕ =
![]() кDE =
кDE =
![]() ( 21.4 )
( 21.4 )
Теперь можно записать матрицу жесткости ( или матрицу внутренней жесткости) для всей рамы:
к= EI .
( 22.4 )
.
( 22.4 )
6. Порядок расчета рамы матричным методом перемещений.
Запишем еще раз основные уравнения, отражающие три стороны задачи в матричной форме:
Уравнения равновесия
Р = А Мi. (23.4)
Геометрические уравнения (уравнения неразрывности деформация)
= В Z = АТ Z (24.4)
Физические уравнения
Мi = к (25.4)
Подставив (24.4) в (25.4), получим
Мi = кАТ Z (26.4).
Подставив (26.4) в (23.4) получим
Р = А кАТ Z (27.4)
Матричное уравнение (27.4) эквивалентно системе канонических уравнений классического метода перемещений: Z – искомые перемещения узлов, р грузовые члены. Матрица ( матрица внешней жесткости)
К = А кАТ ( 28.4 )
представляет собой выражение, каждый член которого равен реактивному усилию в связях по направлению перемещений Z = 1.Уравнения (27.4) можно записать и так
Р = К Z. (29.4)
Определение Z из этой системы уравнений обращением матрицы – дело трудоемкое. Поэтому практически Z находят непосредственно из решения этой системы.
После нахождения Z определяют окончательные значения моментов в расчетных точках по формуле
Мок = МР + Мi = МР + кАТ Z (30.4).
Завершим расчет рамы, показанной на рис. 4.1 После построения всех необходимых матриц работа в первую сводится к составлению матрицы К
Вычислим вначале матрицу кАТ
кАТ =
 (31.4)
(31.4)
Вычислим матрицу АкАТ .
АкАТ = EI
EI![]() (32.4)
(32.4)
Решая систему уравнений
![]() ,
(33.4)
,
(33.4)
получаем значения Z1 и Z2
Z1 = - 0.939/EI, Z2 = 10.43/EI (34/4)
По формуле 26.4 находим моменты в расчетных сечениях от узловой нагрузки
Mi
=kAT
Z = (35.4)
(35.4)
Получим окончательные значения изгибающих моменты в расчетных точках
Mок = MP
+ Mi
= (36.4)
(36.4)
Значения моментов в расчетных точках с большой степенью точности совпадают с полученными значениями для этой задачи в главе 3, Рис.3.21