

5.4 Сельсины
Сельсины были разработаны для синхронно-следящих передач. Однако они успешно применяются в качестве точных и надежных датчиков перемещения. Сельсины представляют собой малые электрические машины, служащие в качестве датчиков как углового, так и линейного перемещения, скорости и т.д.
Сельсины подразделяются на сельсины-датчики и сельсины-приемники. Принципиально они одинаковы, однако конструктивно могут отличаться, так как работают в разных условиях (например, сельсин-датчик может работать на несколько приемников и поэтому должен иметь большую мощность).
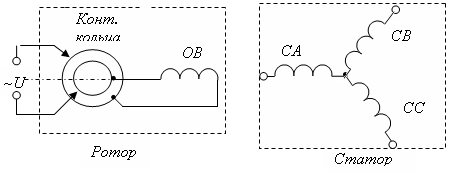
Рисунок 5.7 Сельсин
В состав сельсина входит обмотка возбуждения ОВ, на которую подается напряжение постоянной амплитуды и частоты, и три синхронизирующие обмотки СА, СВ, СС, расположенные под углом 1200 друг к другу (рис. 5.7) . Подключать обмотки подвижной части необходимо с помощью колец и щеток. Так как обмотка возбуждения имеет два, а синхронизирующие обмотки (как минимум) -три контакта, вращающейся выполняют обмотку возбуждения, а синхронизирующие обмотки располагают на статоре. Это связано еще и с тем, что сигналы с синхронизирующих обмоток меняются в зависимости от угла поворота, и переходные сопротивления щеточных контактов могут влиять на выходные напряжения.
Используются различные режимы работы сельсинов. В большинстве случаев синхронизирующие обмотки датчика и приемника соединяются между собой пофазно. С помощью рис. 5.8 на примере трансформаторной связи датчика и приемника показаны принципы работы сельсинов.
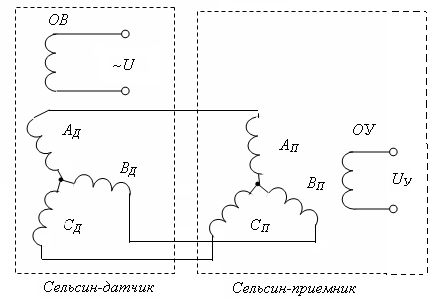
Рисунок 5.8 Трансформаторная связь сельсинов
Обмотка возбуждения ОВ сельсина- датчика подключается к сети частоты f. В зависимости от угла поворота сельсина -датчика в синхронизирующих обмотках (фазах) возникают ЭДС
Е1= ЕО cos , 5.7
Е2= ЕО cos ( + 1200),
Е3= ЕО cos ( - 1200),
где Е0 -- амплитудное значение синусоидального напряжения частоты f.
Эти ЭДС создают в обмотках токи, которые в приемнике вызовут такой же магнитный поток Ф, как и в датчике, так как токи в соответствующих фазах датчика и приемника равны. Поток Ф приемника поворачивается синхронно с поворотом ротора датчика. В обмотке управления датчика возникает ЭДС ЕУ , пропорциональная проекции потока Ф на ось обмотки., т.е.
ЕУ =Е1sin , или ЕУ =Е1 cos 5.8
в зависимости от того, перпендикулярны или параллельны обмотки возбуждения (управления) приемника и датчика. Е1 --максимальное значение ЭДС синусоидального тока в обмотке управления. Обычно используют синусоидальное напряжение (т.е. обмотки располагают перпендикулярно), которое при малых рассогласованиях вообще пропорционально рассогласованию .
Сельсин-датчик устанавливают на валу вращающегося устройства.
Сельсин-приемник жестко связан с валом устройства, которое должно вращаться синхронно с сельсином-датчиком. Это устройство вращается двигателем, который управляется напряжением, снимаемым с обмотки управления сельсина-приемника. При рассогласовании валов на обмотке управления сельсина - приемника в соответствии с 5.8 появится напряжение рассогласования, усилив которое можно воздействовать на двигатель до тех пор, пока напряжение рассогласования не станет равным нулю.
В настоящее время сельсины в связи с их универсальностью , точностью и неприхотливостью к внешним условиям широко используют в машиностроении, авиации и других отраслях хозяйства.
Вопросы для самопроверки
1 Какими достоинствами обладают ШД по сравнению с другими двигателями?
2 Объясните принцип действия ШД.
3 Можно ли изменить величину шага ШД за счет изменения порядка коммутации фаз?
4 Как устроен ротор ШД? Как устроен статор ШД?
5 Какие достоинства имеют тахогенераторы постоянного тока перед тахогенераторами переменного тока и наоборот?
6 Почему тахогенераторы должны иметь длинный ротор малого диаметра?
7 Почему в большинстве сельсинов обмотка управления является вращающейся частью?
8 Почему СКВТ удобно использовать в качестве преобразователя полярных координат в ортогональные?
9 В качестве датчиков каких величин используют сельсины и СКВТ?