

5.2 Тахогенераторы
Тахогенераторы применяются в системах автоматического регулирования в качестве датчиков скорости. Они представляют собой электрические микромашины, выходная ЭДС которых пропорциональна скорости ротора. Применяют тахогенераторы постоянного тока и тахогенераторы переменного тока.
Тахогенераторы постоянного тока представляют собой , в основном, двухполюсные машины с возбуждением от постоянных магнитов (рис. 5.4). Важной особенностью является малый диаметр якоря для уменьшения момента инерции.
В цепь якоря тахогенератора включена нагрузка с сопротивлением RН. Сопротивление якоря RЯ . С генератора на нагрузке падает напряжение
U=E – IЯ RЯ , 5.1
где Е=СЕ Ф
—ЭДС,
возникающая на якоре от его вращения
со скоростью
в магнитном потоке Ф, IЯ
=
![]() --ток
нагрузки.
--ток
нагрузки.
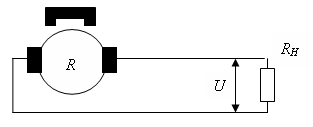
Рисунок 5.4 Тахогенератор постоянного тока
После подстановки в 5.1 входящих в нее величин получается
U= СЕ Ф - RЯ , 5.2
откуда после преобразований
U=
 5.3
5.3
Из 5.3 следует, что выходное напряжение тахогенератора постоянного тока линейно зависит от только при RН = ∞ (рис. 5.3)
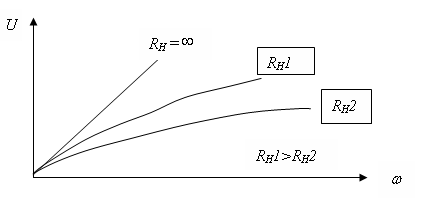
Рисунок 5.3 Зависимость напряжения тахогенератора от скорости
Тахогенераторы переменного тока (рис. 5.5) имеют короткозамкнутый ротор и две взаимноперпендикулярные обмотки—обмотка возбуждения (ОВ) и поперечная обмотка (Г). На обмотку ОВ подают напряжение U частоты f, создающее по продольной оси пульсирующий магнитный поток Фd , пропорциональный напряжению. При отсутствии вращения в короткозамкнутом роторе возникают токи, компенсирующие поток Фd . Напряжение на обмотке Г равно нулю.
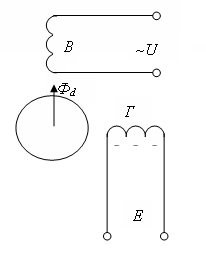
Рисунок 5.5 Тахогенератор переменного тока
Если ротор вращается с частотой , в нем индуцируется ЭДС
Е = СЕ Фd =кU , 5.4
где к—коэффициент пропорциональности, включающий все постоянные.
Эта ЭДС наводит в якоре ток, пропорциональный Е, вызывающий поперечный магнитный поток, который в обмотке Г создает ЭДС
ЕГ = к1U , 5.5
где к1 коэффициент пропорциональности.
Из 5.5 видно, что на обмотке Г создается ЭДС , пропорциональная скорости.
В тахогенераторах переменного тока нет коллектора, что увеличивает надежность, исключает искрение и уменьшает трение. Однако, тахогенераторы постоянного тока имеют следующие преимущества:
-напряжение при неподвижном роторе равно нулю. В тахогенераторах переменного тока на обмотке Г за счет потоков рассеяния некоторое напряжение наводится;
-с постоянным напряжением легче работать;
-характеристика существенно круче.
5.3 Синусно-косинусные вращающиеся трансформаторы (сквт).
СКВТ—малые электрические машины, способные преобразовать (в зависимости от способа подключения потребителя) угол поворота α в напряжения следующего вида:
U = Umsin α, 5.6
U = Umcos α,
U = k α ,
где Um амплитудное значение напряжения; производить преобразование полярных координат в декартовы; служить датчиком перемещения (например, в синхронных передачах).
 СКВТ состоит из неподвижного
статора и поворотного ротора (рис.5.6).
На статоре располагаются обмотка S
, подключаемая к сети переменного
напряжения, и компенсационная обмотка
К, размещенная перпендикулярно
обмотке S. Число
витков wS
= wK
и сопротивления обмоток ZS
= ZK.
На роторе установлены две
взаимноперпендикулярные обмотки А
и В, подключаемые к нагрузкам ZA
и ZВ.
. . .
СКВТ состоит из неподвижного
статора и поворотного ротора (рис.5.6).
На статоре располагаются обмотка S
, подключаемая к сети переменного
напряжения, и компенсационная обмотка
К, размещенная перпендикулярно
обмотке S. Число
витков wS
= wK
и сопротивления обмоток ZS
= ZK.
На роторе установлены две
взаимноперпендикулярные обмотки А
и В, подключаемые к нагрузкам ZA
и ZВ.
. . .
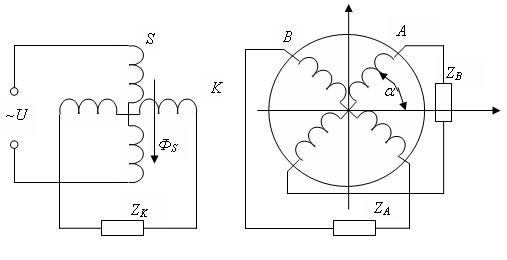
Рисунок 5.6 СКВТ
Обмотка S создает переменный магнитный поток ФS , вектор которого показан на рисунке. В обмотках А и В этим потоком наводятся ЭДС, зависящие от угла поворота α.
ЕА= Е к sin α, 5.7
ЕВ = Е к cos α,
где Е -амплитудное значение ЭДС,
к =
![]()
![]() коэффициент
передачи (трансформации).
коэффициент
передачи (трансформации).
Е и к постоянные величины. Следовательно, ЭДС обмоток зависят только от положения ротора α. Соотношения 5.7 действительны при ZA = ZВ = ∞. Если это условие не выполняется, токи обмоток А и В наводят потоки ФА и ФВ , направленные вдоль своих обмоток и искажающие выходные напряжения. Каждый из этих потоков можно разложить на две составляющие –продольную и поперечную,--ФАS и ФАR , ФBS и ФВК.. Продольная составляющая компенсируется потоком обмотки S. Для компенсации поперечной составляющей служит обмотка К. В ней за счет поперечных потоков наводится ЭДС. Чтобы эта ЭДС компенсировала наводящий ее поток, обмотку замыкают сопротивлением ZК (к—компенсационная). Условием наилучшей компенсации является ZК = ZИСТ , где ZИСТ –выходное сопротивление источника напряжения. Компенсация за счет первичных обмоток называется первичным симметрированием. Эффективность первичного симметрирования различна при разных α. Применяют вторичное симметрирование, заключающееся в выполнении условия ZA= ZB. Использование даже обоих видов симметрирования не приводит к полной компенсации.
В промышленности применяют разновидности вращающихся трансформаторов—индуктосин и редуктосин, используемые в синхронно-следящих системах (в станках с ЧПУ, имеющими малые погрешности). Недостатком СКВТ является высокая стоимость, связанная со сложностью изготовления.