

Критерий Вышнеградского для систем III порядка:
![]()
Для устойчивости системы необходимо и достаточно, чтобы выполнялись условия:
ai > 0
a2a1 > a0a3
Запишем уравнение в безразмерном виде:
p3+A2p2+A1p+1=0

Критерий Вышнеградского:
для устойчивости системы необходимо и достаточно: A1 > 0, A2 > 0, A1A2 > 1
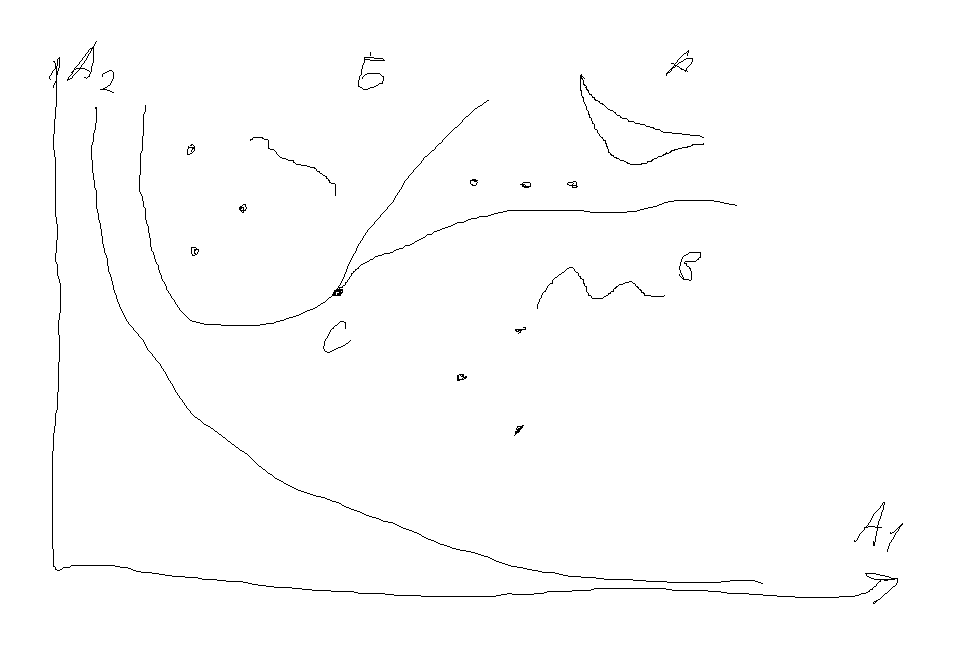
3 вещественных корня (A) – апериодический процесс;
Область (Б) – монотонный процесс, колебательная часть затухает быстрее;
Область (В) – колебательный процесс, колебательная часть затухает медленнее.
C – точка равенства всех корней. Границе между любыми областями будет соответствовать предельное между двумя распределениями расположение корней.
Билет 27.
Интегральные оценки дают общую информацию о быстроте затухания и величине отклонения регулируемой величины.
![]() ,
где x(t)=xпер
– xоп
– отклонение регулируемой величины от
нового установившегося значения. В
устойчивой системе при x0,
t∞
интеграл имеет конечную величину.
Геометрический смысл – площадь под
кривой переходного процесса, записанного
в отклонениях.
,
где x(t)=xпер
– xоп
– отклонение регулируемой величины от
нового установившегося значения. В
устойчивой системе при x0,
t∞
интеграл имеет конечную величину.
Геометрический смысл – площадь под
кривой переходного процесса, записанного
в отклонениях.
Не
всегда объективен (площади могут быть
отрицательными), поэтому зачастую
применяют другую оценку:
![]()
При управлении желательно минимизировать эти оценки, однако иногда требуется поправка на скорость (не должна быть большой):
![]()
Билет 28.
На практике требуется определять характеристики системы при отклонении параметров системы от расчетных. Для оценки этого явления используют функции чувствительности:
 ,
αj
– изменяемый параметр, 0 – функция
вычисляется при расчетном αj.
,
αj
– изменяемый параметр, 0 – функция
вычисляется при расчетном αj.
Исходная функция – функция, все параметры которой соответствуют расчетным (не имеют вариаций), н-р:
![]() .
.
Варьируемая система – есть вариации параметров:
![]()
Дополнительное
движение:
![]() .
.
При условии дифференцируемости функций по αi, возможно разложить дополнительное движение в ряд Тейлора. Для первого приближения получим следующее:
 .
.
При существенной нелинейности используется второе приближение в ряду Тейлора.
Дифференцирование исходных уравнений ведет к получению уравнений чувствительности, решение которых позволяет найти ui,j:
![]()
Удобно использовать передаточные функции:
![]()

Функция чувствительности передаточной функции:

Билет 29.
Системы с запаздыванием – системы, имеющие в одном или нескольких звеньях запаздывание во времени начала изменения выходной величины после изменения входной на величину τ.
Уравнение динамики звена с запаздыванием можно разбить на 2:
Q(p)x2=R(p)x1*
x1*(t)=x1(t-τ)
Реальное звено с запаздыванием можно приближенно описать, используя разложение в ряд:
 ,
p
– оператор дифференцирования.
,
p
– оператор дифференцирования.
W(p)=e-τp – передаточная функция звена чистого дифференцирования.
Тогда:
Q(p)x2 = R(p) e-τp x1.
Частотная передаточная функция с запаздыванием:
W(iw)=W0(iw)e-iwτ = A0(w)ei(u(w)-τw).