Практическое задание №9
Указать назначение реостатных и потенциометрических датчиков. Изобразить включение резистора по схеме реостата и по схеме потенциометра. Определить статическую характеристику датчика.
Решение
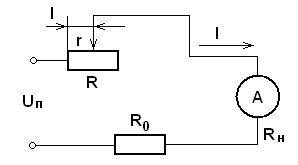
Реостатные и потенциометрические датчики служат для преобразования углового или линейного перемещения в электрический сигнал. Преобразователи активного сопротивления представляют собой резистор переменного сопротивления. В электрическую цепь резистор может включаться по схеме реостата, такие преобразователи называются реостатными.
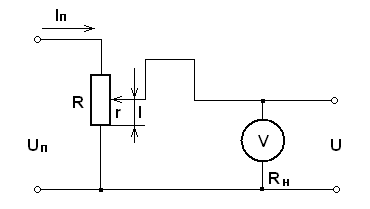
В электрическую цепь резистор может включаться по схеме потенциометра, такие преобразователи называются потенциометрическими.
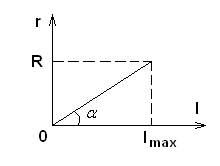
Рассмотрим статическую характеристику преобразования активного сопротивления, когда за вход принято перемещение l движка реостата, а за выход- значение r его активного сопротивления в электрической цепи. При полном перемещении движка
l=lmax
сопротивление равно полному сопротивлению R резистора. С учетом этого статическая характеристика
r=kl,
где
k=R/lmax-
передаточный коэффициент. Подставляя
k
в (1) и обозначив
![]() перемещение движка реостата в относительных
единицах l/lmax,
получаем
перемещение движка реостата в относительных
единицах l/lmax,
получаем
r= R.
Это выражение применяется в технике для определения степени введения в электрическую цепь переменного резистора.
Практическое задание №10
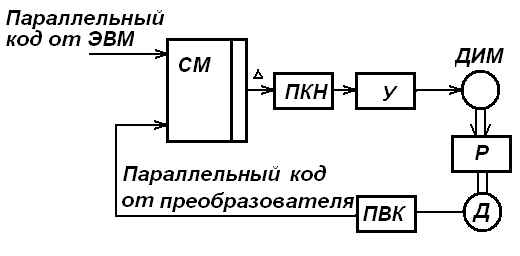
По предложенным блокам собрать схему цифроаналогового преобразователя кода в угол поворота. Указать назначение ЦАП. Описать принцип работы схемы.
Решение
Двоичные коды в аналоговые эквиваленты преобразуются различным способом, но все они основаны на сложении аналоговых составляющих, пропорциональных некоторым двоичным приращениям (элементам) исходного двоичного числа.
Преобразователи кода в угол поворота часто называют цифровыми следящими системами.
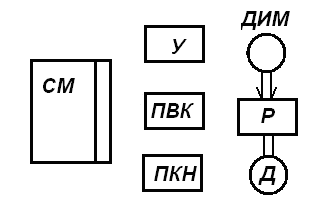
Схема работает следующим образом. На сумматор цифровой следящей системы поступают по двум каналам параллельные коды. Один код поступает от задающего устройства — ЭВМ, а второй — от преобразователя «вал — код». В сумматоре происходит вычитание этих кодов. Разность кодов поступает на преобразователь кода в напряжение ПКН, а с его выхода — на вход усилителя У следящей системы. Усиленный сигнал передается на управляющую обмотку исполнительного двигателя следящей системы. Двигатель поворачивает датчик Д на угол, пропорциональный выходному коду сумматора. Двигатель Дв поворачивается до тех пор, пока разность на выходе сумматора не будет равна нулю. В этом случае угол поворота двигателя или датчика будет с определенной точностью соответствовать входному двоичному коду.