

Механические характеристики ад в двигательном режиме.
Для вывода уравнения механической характеристики асинхронного двигателя можно воспользоваться упрощенной схемой замещения, приведенной на рисунке 1, где приняты следующие обозначения:
Uф
— первичное фазное напряжение; I1
— фазный ток статора; I'2
— приведенный ток ротора; Х1
и X'2,
— первичное
и вторичное приведенные реактивные
сопротивления рассеяния; R0
и Х0
— активное
и реактивное сопротивления контура
намагничивания;
![]() — скольжение двигателя;
— скольжение двигателя;
![]() -
синхронная угловая скорость двигателя;
w0
= 2f/p;
R1
и R'2.
— первичное
и вторичное приведенные активные
сопротивления; fi
— частота сети; р
— число пар полюсов.
-
синхронная угловая скорость двигателя;
w0
= 2f/p;
R1
и R'2.
— первичное
и вторичное приведенные активные
сопротивления; fi
— частота сети; р
— число пар полюсов.
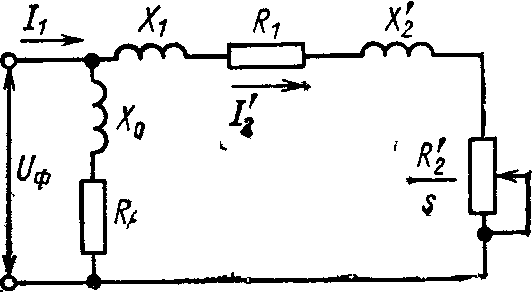
Рисунок 1 - Упрощенная схема замещения асинхронного двигателя
В соответствии с приведенной схемой замещения можно получить выражение для вторичного тока
![]()
 (1)
(1)
Момент
асинхронного двигателя может быть
определен из выражения потерь
![]() откуда
откуда
Подставляя
значение тока получаем: (2)
(2)
Кривая момента М = f(s) имеет два максимума: один — в генераторном режиме, другой - в двигательном.
Приравнивая
dM/ds=0,
определяем значение критического
скольжения Sк,
при котором двигатель развивает
максимальный (критический) момент
Подставляя значение Sк , находим выражение для максимального момента
 (3)
(3)
Знак «+» относится к двигательному режиму (или торможению противовключением), знак «-» - к генераторному режиму работы параллельно с сетью (при w>w0). Вследствие чего величина момента Мк в генераторном режиме будет больше чем в двигательном.
Если выражение (3) разделить на (2) и произвести соответствующие преобразования, то можно получить:
![]()
где
Mк
— максимальный
момент двигателя; Sк
— критическое скольжение, соответствующее
максимальному моменту;
![]() .
.
Здесь следует подчеркнуть весьма важное для практики обстоятельство— влияние изменения напряжения сети на механические характеристики асинхронного двигателя. Как видно из (2), при данном скольжении момент двигателя пропорционален квадрату напряжения, поэтому двигатель этого типа чувствителен к колебаниям напряжения сети. Критическое скольжение и угловая скорость идеального холостого хода не зависят от напряжения.
На рисунке 2 приведена механическая характеристика асинхронного двигателя. Ее характерные точки:
1) s = 0; М =0, при этом скорость двигателя равна синхронной;
2) s == sном; M = Mном, что соответствует номинальной скорости и номинальному моменту;
3) s == sk; М == Мк.д — максимальный момент в двигательном режиме;
4)
s=
1,0;
 —начальный
пусковой момент:
—начальный
пусковой момент:
5) s = -sk; М = -Мк.г. - максимальный момент в генераторном режиме работы параллельно с сетью.
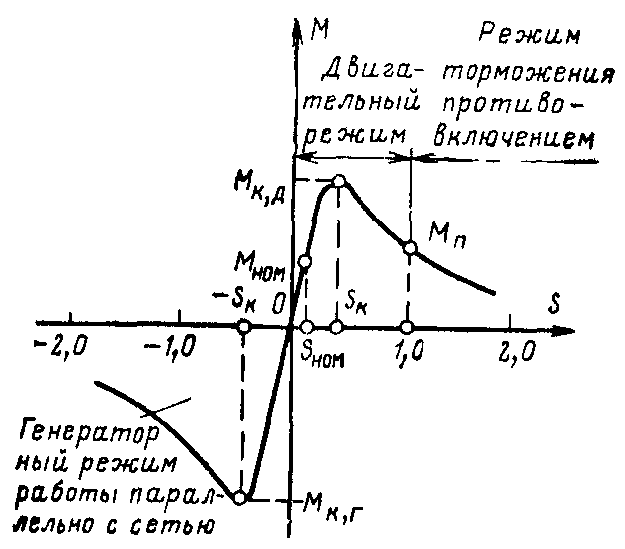
Рисунок 2 - МХ асинхронного двигателя
При s > 1,0 двигатель работает в режиме торможения противовключением, при s < О имеет место генераторный режим работы параллельно с сетью.
Необходимо подчеркнуть, что абсолютные значения sк в двигательном и генераторном параллельно с сетью режимах одинаковы.
МХ построенная при Uп=Uном, при номинальной частоте питающей сети и при Rдоб=0 называется естественной.
Соответственно, семейство МХ, построенных либо при изменении U, либо при изменении f или активное сопротивление ротора называют искусственными.
1) U=var.
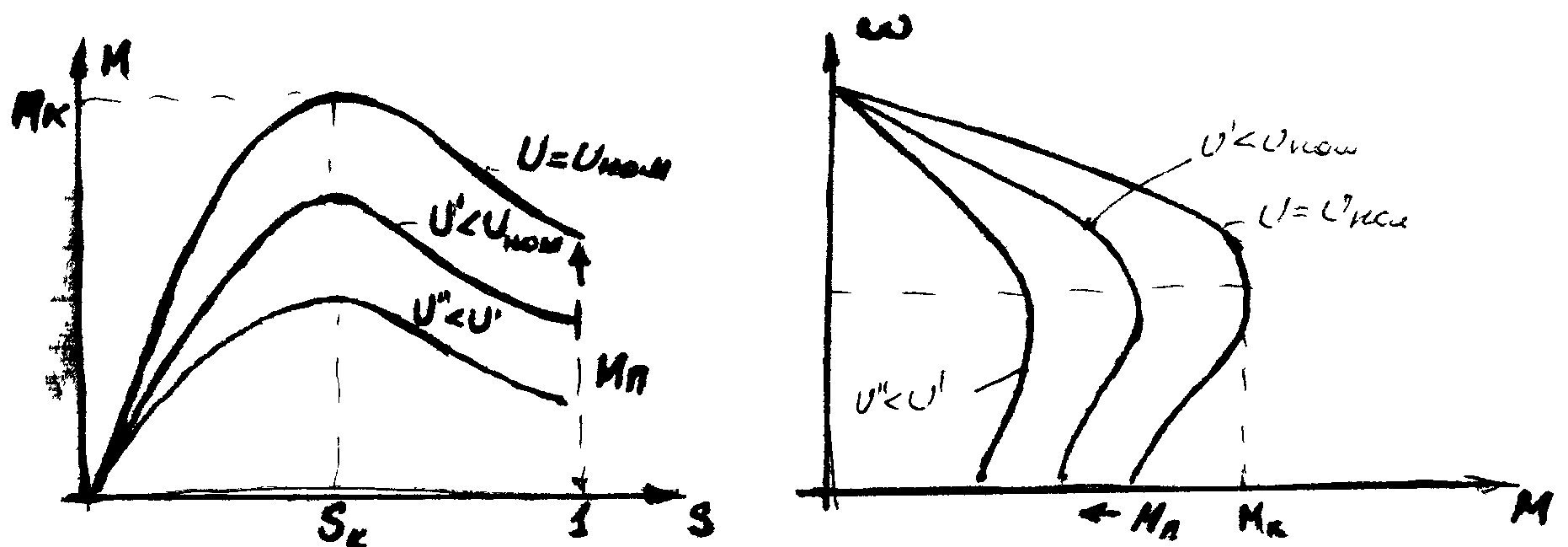
При U: SK не меняется, Mк и Мп пропорционально квадрату напряжения.
Жесткость рабочей части МХ уменьшается.
2) f=var
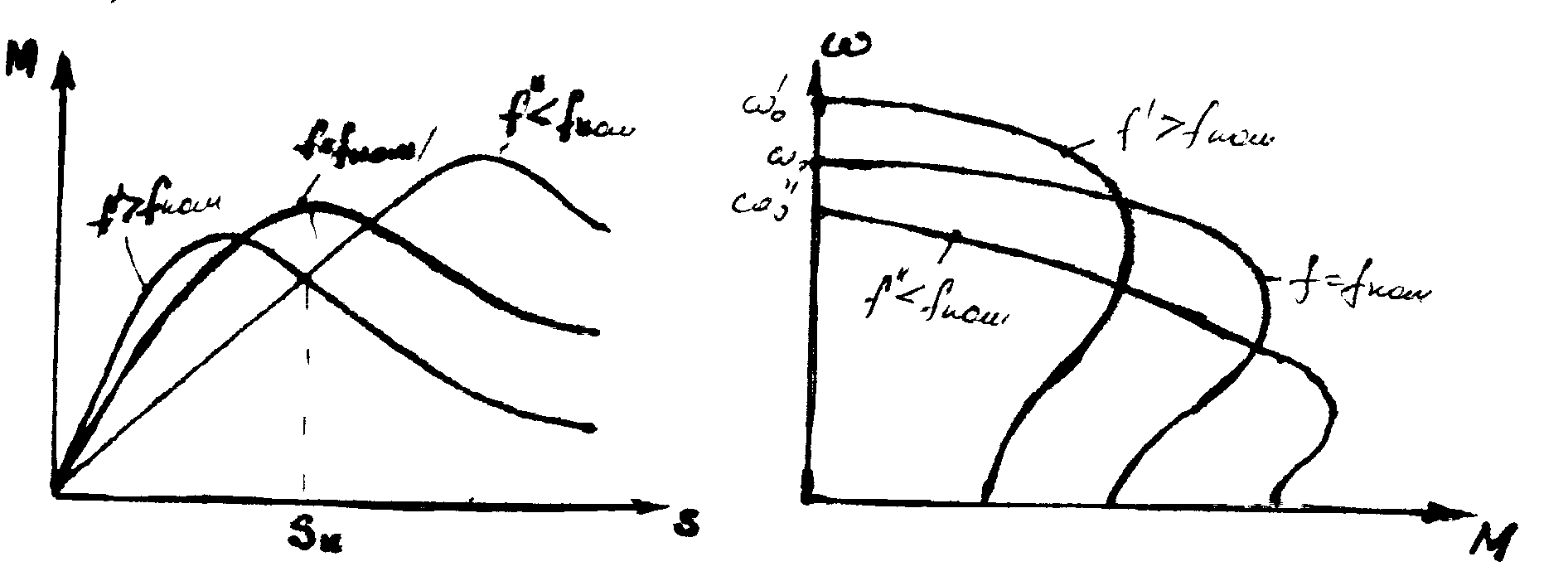
![]() ,
,![]() ,
,
![]() ,
,![]()
При f: SK, MK, MП, w0. Жесткость рабочей части характеристики практически не меняется.
При f: SK, MK, MП, w0. Жесткость не меняется.
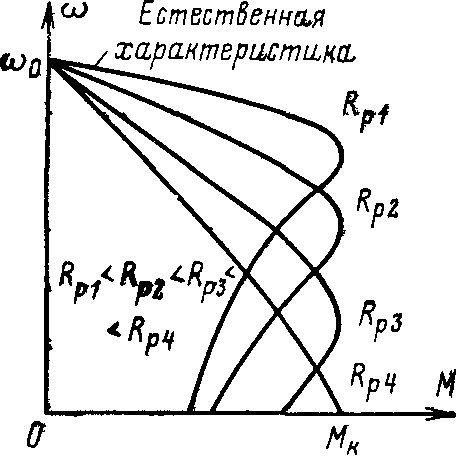
Естественная и реостатные механические характеристики асинхронного двигателя с фазным ротором
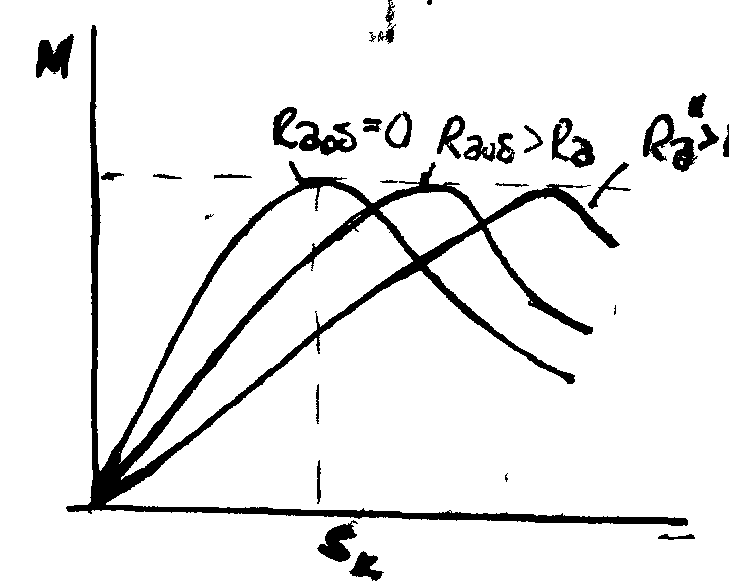
3) R2=var
При R2 :SK, MП, MK не меняется. Жесткость снижается.