

47. Автоматизированные каскадные электроприводы переменного тока. Классификация, устройство и принцип действия.
Преимущества и недостатки, области применения.
Каскадные электроприводы с асинхронными двигателями с фазным ротором целесообразно применять в установках средней и большой мощности, работающих в продолжительном режиме при относительно небольших диапазонах регулирования. К таким установкам относятся воздуходувки, центробежные насосы, шахтные вентиляторы.
Каскадные электроприводы позволяют полезно использовать энергию скольжения, повышая при этом эффективность электропривода. Они легко поддаются автоматизации.
Каскадные электроприводы в зависимости от того, как реализуется энергия скольжения, разделяются на электрические и электромеханические. В электрических каскадах энергия скольжения за вычетом потерь возвращается в питающую сеть. В электромеханических энергия скольжения, преобразованная в механическую энергию, возвращается на вал основного асинхронного двигателя.
По типу устройства, преобразующего энергию скольжения, различают электромашинные, вентильно-машинные и вентильные каскады.
Электромашинные каскады с асинхронными двигателями не получили широкого применения, так как предусматривали включение в роторную цепь одноякорного преобразователя, отличающегося повышенной инерционностью, неудовлетворительными условиями коммутации и неустойчивой работой при малых скольжениях.
Наиболее простыми схемами вентильных и вентильно-машинных каскадов являются схемы с промежуточным звеном постоянного тока. Принципиальная схема вентильно-машинного электрического каскада с промежуточным звеном постоянного тока приведена на рис. 1.

Рисунок 1-Вентильно-машинный электрический каскад
Здесь обмотка статора основного асинхронного двигателя M1 присоединена к сети переменного тока промышленной частоты, а роторная обмотка соединена с выпрямительным мостом В. Энергия скольжения преобразуемая выпрямительным мостом, реализуется двигателем постоянного тока М2. С помощью синхронного генератора G, находящегося на одном валу с ДПТ, энергия скольжения за вычетом потерь возвращается в питающую сеть.
Регулирование угловой скорости двигателя Ml осуществляется изменением добавочной ЭДС, создаваемой машиной М2 в цепи выпрямленного тока посредством воздействия на ток возбуждения этой машины при помощи R1.
Ток на выходе выпрямителя
![]()
Если принять Id = 0, то можно, найти скольжение, отвечающее угловой скорости идеального х.х.
![]()
или, для упрощения полагая U=0, получить:
![]()
где 0— синхронная угловая скорость асинхронного двигателя Ml. Таким образом, угловая скорость идеального холостого хода каскада снижается по мере увеличения Едоб.
На рис.2 приведены механические характеристики электрического каскада.
Рисунок 2- Механические характеристики электрического каскада.
Полное использование АД в электрическом каскаде достигается в случае постоянства момента нагрузки (при независимой вентиляции) на его валу, поэтому вентильно-машинный электрический каскад называют каскадом постоянного момента.
В рассматриваемом случае установленная мощность выпрямительного моста и МПТ определяется наибольшим напряжением на кольцах ротора, пропорциональным скольжению, и наибольшим током, зависящим от момента нагрузки.
При постоянном моменте нагрузки наибольшему напряжению в роторной цепи, обусловленному диапазоном регулирования, соответствует наименьшая угловая скорость асинхронного двигателя и наибольший, равный номинальному, ток нагрузки .
В случае вентиляторной нагрузки наибольшему току нагрузки соответствует минимальное напряжение. Однако как при регулировании с постоянным моментом, так и при регулировании с вентиляторным моментом установленные мощности преобразовательных агрегатов будут одинаковы.
Активная мощность синхронного генератора определяется максимальной мощностью скольжения. Отсюда следует, что чем больше диапазон регулирования угловой скорости, тем больше установленная мощность устройств в роторной цепи асинхронного двигателя. Поэтому практический диапазон не превышает D=2:1, при этом суммарная установленная мощность вентильно-машинного электрического каскада составляет 250 % и разделяется так: 100 % основной асинхронный двигатель, 50 % — выпрямительный мост, 50% —машина постоянного тока и 50% —синхронный генератор, С увеличением диапазона регулирования угловой скорости возрастает установленная мощность каскада, достигая 400 %.
Регулирование угловой скорости может осуществляться только вниз от основной. Плавность регулировании угловой скорости неограниченна, так как она определяется плавностью изменения тока возбуждения машины постоянного тока. Pегулирование экономичное. Коэффициент полезного действия электропривода при номинальной нагрузке и максимальной угловой скорости каскада составляет примерно 0,82—0,85 (уменьшаясь с уменьшением нагрузки и угловой скорости). Коэффициент мощности собственно каскада при указанных условиях составляет 0,7—0,75, однако может быть увеличен за счет перевозбуждения синхронной машины агрегата постоянной скорости.Стабильность существенно выше, чем при реостатном и других видах параметрического и импульсного регулирования, но хуже, чем при частотном управлении.
Принципиальная схема вентильно-машинного электромеханического каскада приведена на рис. 3.
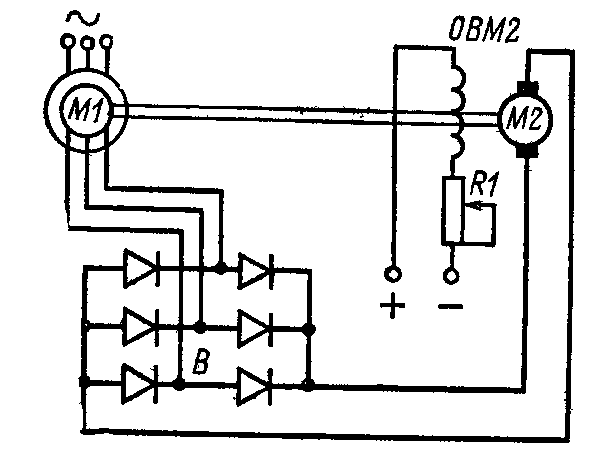
Рисунок 3- Принципиальная схема вентильно-машинного электромеханического каскада.
Как и в предыдущем случае, к сети переменного тока присоединяется статор АД M1, ротор которого механически связан с ДПТ М2. Электрически якорь двигателя соединен через выпрямительный мост с обмоткой ротора; реализуемая двигателем постоянного тока энергия скольжения за вычетом потерь возвращается на вал привода.
Регулирование угловой скорости привода осуществляется изменением добавочной ЭДС, создаваемой двигателем постоянного тока, в цепи выпрямленного напряжения.
Управляющим воздействием при регулировании угловой скорости является изменение тока возбуждения двигателя постоянного тока. С увеличением тока возбуждения снижается угловая скорость двигателей. Очевидно, что в электромеханическом каскаде ЭДС МПТ зависит не только от тока возбуждения, но и от угловой скорости АД, поскольку обе машины находятся на одном валу.
Электромагнитный момент, развиваемый каскадом, равен сумме моментов АД и МПТ. С увеличением магнитного потока машины постоянного тока момент каскада возрастает, при этом угловая скорость его снижается. Примерные характеристики вентильно-машинного электромеханического каскада приведены на рис. 4.
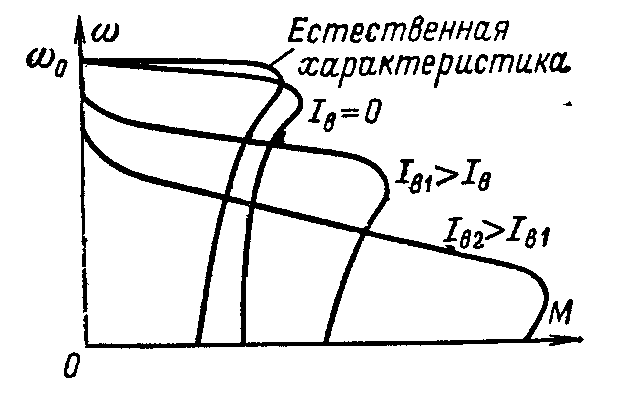
Рисунок 4- Примерные механические характеристики вентильно-машинного электромеханического каскада.
Таким образом, суммарная мощность, развиваемая каскадом независимо от скольжения (и от угловой скорости), будет поддерживаться постоянной. Поэтому иногда вентильно-машинный электромеханический каскад называют каскадом постоянной мощности.
Уже при s =0,5 Pм2=Рм1, с ростом скольжения, т.е. с увеличением диапазона регулирования, мощность машины постоянного тока существенно возрастает по сравнению с мощностью Рм1, поэтому диапазон регулирования ограничен практически значением 2:1. Вентильно-машинный каскад позволяет получить плавное однозонное (вниз от основной) экономичное регулирование.
Коэффициент полезного действия каскада при регулировании угловой скорости и полной нагрузке составляет примерно 0,82-0,85, а коэффициент мощности АД при номинальной угловой скорости и полной нагрузке составляет примерно 0,75—0,8.Стабильность угловой скорости примерно такая же, как и в случае электрического каскада.
Электрический вентильный каскад. Принципиальная схема такого каскада, называемого асинхронно-вентильным (АВК), приведена на рис. 5. Здесь АД М подключен со стороны статора к сети переменного тока, роторная цепь его через выпрямитель В, инвертор И и согласующий трансформатор Т присоединяется к той же питающей сети. Для сглаживания выпрямленного тока и нормальной работы инвертора включен реактор L. Принцип действия этого каскад, аналогичен действию вентильно-машинного каскада и состоит в том, что в цепь выпрямленного тока ротора вводится добавочная ЭДС, получаемая регулированием угла опережения включения тиристоров инвертора.
Рисунок
5- Асинхронно-вентильный каскад
Рисунок
6- Механические характеристики АВК
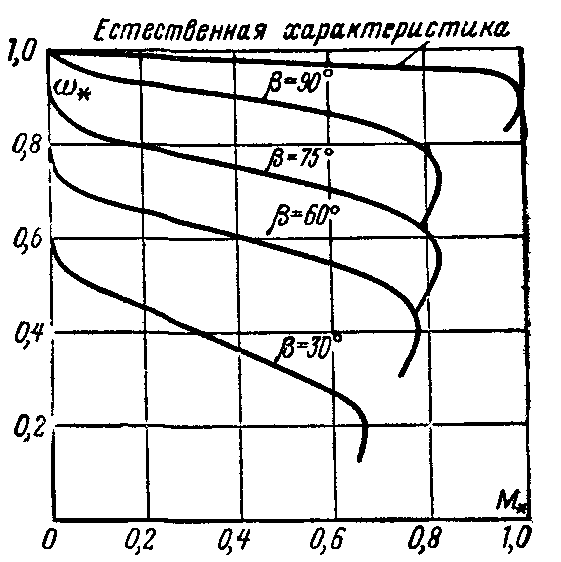
Примерные механические характеристики АВК показаны на рис. 6 (момент выражен в долях максимального момента двигателя в естественной схеме включения). Из них видно, что при некотором угле перегрузочная способность АВК падает. Регулировочные свойства АВК при уменьшении угловой скорости ограничены некоторым допустимым по условиям устойчивой работы инвертора минимальным углом и током инвертирования.
Максимальная угловая скорость АВК при номинальной моменте составляет примерно 0,90 минимальная угловая скорость практически принимается равной 0,50. Дальнейшее снижение угловой скорости приводит к увеличению установленной мощности всех силовых элементов включенных в роторную цепь.
Регулирование угловой скорости в АВК однозонное (вниз от основной и плавное бесступенчатое экономичное. КПД асинхронно-вентильного каскада достигает 0,82—0,9 при максимальной угловой скорости и тем выше, чем больше его мощность. При снижении угловой скорости КПД падает. Если КПД сравнительно высок, то коэффициент мощности АВК оказывается низким, что обусловливается значительным суммарным потреблением реактивной мощности двигателем и инвертором и искажением тока инвертором. Коэффициент мощности зависит не только от нагрузки, но и от угловой скорости асинхронного двигателя.
Стабильность угловой скорости АВК хуже, чем у вентильно-машинного электрического каскада. Регулировании осуществляется при независимой вентиляции с постоянным (номинальным) моментом нагрузки.
Следует отметить, что в рассмотренных схемах каскадов двигатель может работать в двигательном режиме при скорости ниже синхронной, в режимах противовключения, динамического торможения и генераторном параллельно с сетью при скорости выше синхронной. Двигатель не может работать в генераторном режиме при скорости ниже синхронной и двигательном режиме при сверхсинхронной скорости, когда энергия должна поступать из сети в ротор, что невозможно при нереверсивном неуправляемом выпрямителе в роторной цепи.