

37. Электродвигатели и блоки управления электроприводами станков-качалок.
Область экономически целесообразного применения штанговых плунжерных насосов (станков-качалок) или бесштанговых погружных центробежных электронасосов определяется суточной производительностью скважины Q и глубиной подвески насоса Нп. Для станков качалок эта область лежит в пределах Q=5-50 м3/сут. Нп1600м. Так же они могут применяться и при Q до 300 м3/сут, но при меньшей глубине подвеса Нп400м.
Требования, предъявляемые к ЭД станков-качалок, обусловлены графиком их нагрузки, а так же характером процесса пуска станка-качалки.
При пуске станка качалки ЭД должен развивать момент, обеспечивающий преодоление статического момента сопротивления и момента необходимого для разгона до установившейся скорости. Статический момент сопротивления при пуске превышает момент при установившемся режиме за счет увеличенных сил трения, обусловленных заеданием движущихся частей, наличием песчаных пробок и выжиманием смазки.
Следует иметь в виду, что процесс пуска зависит от начального положения кривошипа станка качалки и от того как изменяется нагрузка после пуска. Опыт показывает, что для привода станков-качалок пригодны ЭД с кратностью Мпуск/Мном=1,8-2.
При этом запуск малых и средних станков качалок осуществляется не долее чем за 5 секунд, а тяжелых станков качалок не более чем за 10 секунд.
При хорошем уравновешивании станка качалки Мпуск/Мном= Кмах=1,8-1,9.
Вероятность перегрузок двигателя возрастает при использовании насосов малых диаметров при больших частотах качаний, больших длинах хода, атак же большой глубине подвески насоса.
Для приводов станков качалок используют АД с кратностью пускового момента в пределах 2.1-2.8, что обеспечивает надежную работу эл двигателей в любых ситуациях, включая значительное снижение напряжения сети.
Для приводов станков-качалок используют 3-хфазные АД с короткозамкнутой обмоткой ротора (глубокопазной или с двойной беличьей клеткой). Мощности двигателей меньше 50 кВт. До недавнего времени использовали двигатели в закрытом обдуваемом исполнении с повышенным пусковым моментом серии АОП2. Однако опыт эксплуатации двигателей этой серии общепромышленного назначения показал, что они не отвечают требованиям надежной работы на открытом воздухе. В настоящее время используют двигатели серии 4А имеющие диапазон мощностей 1.1-30 кВт, при частоте вращения n=1500 об/мин. Габаритные размеры этих двигателей меньше, так как в них применяется более нагревостойкая изоляция.
Развиваемый двигателем момент прямо пропорционален активному сопротивлению обмотки ротора у глубокопазного двигателя в момент пуска из-за вытеснения тока на поверхность увеличивается активное сопротивление обмотки ротора за счет уменьшения сопротивления проводника. Это приводит к увеличению пускового момента и уменьшению пусковых токов. У двигателей с двойной беличьей клеткой также происходит вытеснения тока в наружную клетку, сечение проводников которой меньше и она выполнена из материала (латуни) с относительно большим удельным сопротивлением. Внутренняя обмотка выполнена из меди. Результирующий пусковой момент складывается из моментов создаваемых двумя клетками.
В некоторых случаях в качестве электроприводов используют СД с целью увеличения cos сети. Они снабжены беличьей клеткой, которая обеспечивает асинхронный пуск синхронного двигателя. Двигатель втягивается в синхронизм при ходе плунжера вниз, что соответствует минимальной нагрузке.
Условия эксплуатации глубинно погружных насосов требуют применение регулируемого привода. Это бывает необходимым для выбора оптимального режима отбора жидкости в начале и в конце эксплуатации скважины. Может возникнуть необходимость в увеличении частоты качаний при большом содержании песка в откачиваемой жидкости.
Для регулировании частоты вращения привода можно использовать ДПТ, многоскоростные АД, синхронные двигатели с коробкой передач и АД с частотным регулировании частоты вращения.
Для повышения эффективности работы электродвигателя и питающей сети, а так же станка-качалки необходимо выровнять нагрузку при ходе плунжера вверх и вниз. Уравновешивание осуществляется специальным противовесом, который устанавливают или на плече балансира или на кривошипе. Противовесы создают дополнительные моменты и при ходе плунжера вверх двигатель разгружается. При ходе плунжера вниз двигатель догружается за счет тормозящего дополнительного момента. Массу противовесов выбирают так, чтобы обеспечивалось равенство максимальных моментов сопротивления или мощностей нагрузки на валу двигателя за оба полуцикла. Условия равенства моментов легко проверить, контролируя ток двигателя.
Г лубинно
насосные установки относятся ко второй
категории надежности электроснабжения,
однако в районах со сложными условиями
эксплуатации эти установки могут
относиться к первой категории. Питание
глубинно насосных установок осуществляется
при напряжении 380В от устанавливаемых
на скважинах КТП 6/0,4 кВ, запитываемых
от ВЛ. Выпускаются специальные подстанции
для питания станков качалок типа КТПНД
мощностью 25-250 кВА. Они имеют 3 модификации:
1-для одиночных скважин, остальные для
кустовых скважин.
лубинно
насосные установки относятся ко второй
категории надежности электроснабжения,
однако в районах со сложными условиями
эксплуатации эти установки могут
относиться к первой категории. Питание
глубинно насосных установок осуществляется
при напряжении 380В от устанавливаемых
на скважинах КТП 6/0,4 кВ, запитываемых
от ВЛ. Выпускаются специальные подстанции
для питания станков качалок типа КТПНД
мощностью 25-250 кВА. Они имеют 3 модификации:
1-для одиночных скважин, остальные для
кустовых скважин.
Промышленностью выпускаются блоки управления эл приводов станков-качалок серии БГШ. По номинальному току различают блоки на 15, 20, 40, 100 А.
Блоки управления БТШ обеспечивают следующие функции:
пуск и отключение двигателя в ручном режиме
автоматическое отключение двигателя при обрыве одной из фаз
отключение двигателя при перегрузках сверх допустимого предела
отключение двигателя при к.з. в его обмотках или кабеле
отключение двигателя при снижении или исчезновении напряжения
автоматический пуск при восстановление напряжения в питающей сети АПВ
отключение двигателя при аварийном состоянии скважины.
Относительно современными являются блоки управления станков качалок БУС-3, БУС-4, имеющие в зависимости от мощности двигателя 7 исполнений. Основные функции те же, но предусмотрена возможность индикации основных параметров.
Основные элементы представлены на рис 1. Глубинный насос 1 подвешивается на колонне насосных труб 3. При помощи колонны штанг 4 плунжеру насоса сообщается возвратно-поступательное движение с передачей энергии от балансира 7 станка-качалки. Станок имеет эл двигатель 12 и редуктор 10. Насос состоит из цилиндра 1 внутри которого перемещается плунжер 2. При ходе плунжера вверх отклывается нижний клапан 4, верхний клапан 5 приэтом закрыт. Жидкость из клапана засасывается в цилиндр насоса. При ходе плунжера вниз клапан 4 закрывается, а нефть через открытый клапан 5 подается в пространство насосных труб. Колонна штанг на устье скважины через шток 5 соеденина сголовкой балансира 6 станка-качалки. Балансир 6 с помощью шатунов 8 связан с кривошипами 9 вал которых через редуктор 10 и клиноременную передачу 11 связан с ЭД. 12 . изменяя расстояние от кривошипного вала до места присоединения шатунов к кривошипу модно регулировать ход полированного штока или длину хода плунжера насоса. Балансирный 13 и кривошипный 14 противовесы служат для уравновешивания нагрузки подвижной системы станка качалки и двигателя при ходе колонны штанг вверх и вниз.
Частоту колебаний балансира можно изменять путем установки шкивов различных диаметроав у клиноременной передачи. Диапазон изменения частоты колебаний балансира изменяется от 5 до 15 в минуту.
М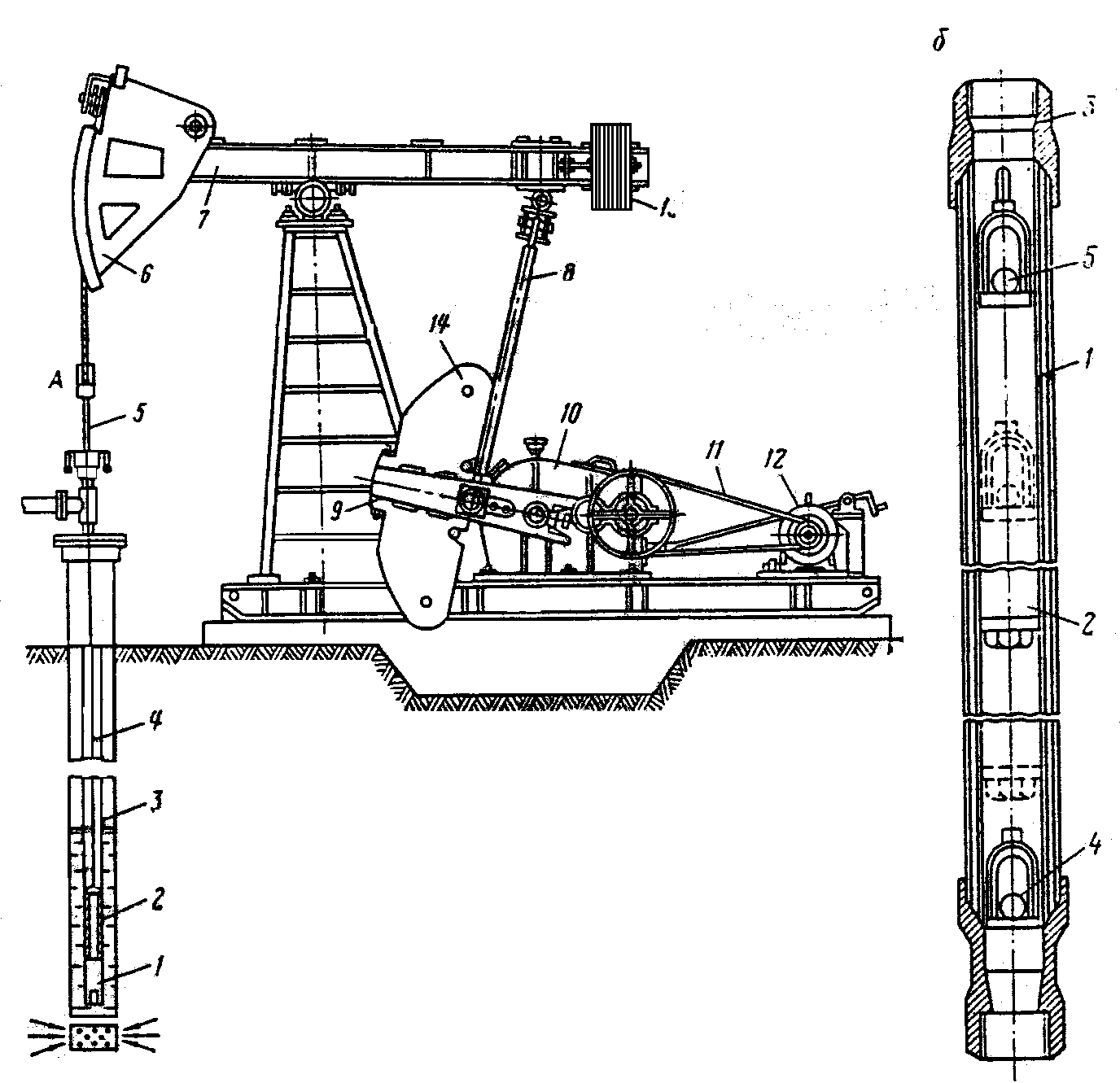 ощность
ЭД для приводов 9-ти базовых моделей СК.
изменяется в пределах от 1,7 до 55кВт. Если
не снабдить станки-качалки приспособлениями
для уравновешивания, то нагрузки
приводного ЭД будут резко отличаться
при ходе плунжера вниз и вверх. Может
возникнуть ситуация, что при ходе
плунжера вниз двигатель будет работать
в генераторном режиме и выполнять роль
тормоза. Режим неравномерной нагрузки
приводит к снижению КПД.
ощность
ЭД для приводов 9-ти базовых моделей СК.
изменяется в пределах от 1,7 до 55кВт. Если
не снабдить станки-качалки приспособлениями
для уравновешивания, то нагрузки
приводного ЭД будут резко отличаться
при ходе плунжера вниз и вверх. Может
возникнуть ситуация, что при ходе
плунжера вниз двигатель будет работать
в генераторном режиме и выполнять роль
тормоза. Режим неравномерной нагрузки
приводит к снижению КПД.