

2. Регулирование скорости вращения дпт.
Регулирование – принудительное изменение скорости вращения ЭП, связанное с требованиями технологического процесса или в целях энергосбережения. Различают механические и электрические способы регулирования.
ДПТ по способу реализации возбуждения делятся на ДПТ независимого, последовательного, параллельного и смешанного возбуждения.
Регулирование скорости ДПТ НВ
Уравнения механической и скоростной характеристики ДПТ НВ имеют вид
![]() ;
;![]() ,
,
где R = Rя + Rдоб.
Проанализировав эти выражения следует, что возможны три принципиально различных способа регулирования угловой скорости двигателя:
изменением сопротивления цепи якоря посредством резисторов (реостатное);
изменением тока возбуждения (магнитного потока) двигателя;
изменением подводимого к якорю двигателя напряжения.
1) R=var
При реостатном регулировании регулирующее воздействие вносится в цепь якоря путем изменения добавочного сопротивления Rдоб, которое изготавливается ступенчатым, ступени соединены между собой последовательно, а управление осуществляется при помощи релейно – контакторных схем. Скоростные и механические характеристики аналогичны друг другу.
Рис.1.
Схема включения ДПТ НВ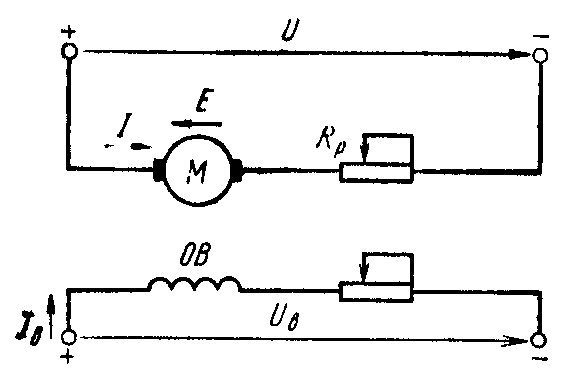
ПКР:
Направление – 1 зонное – вниз.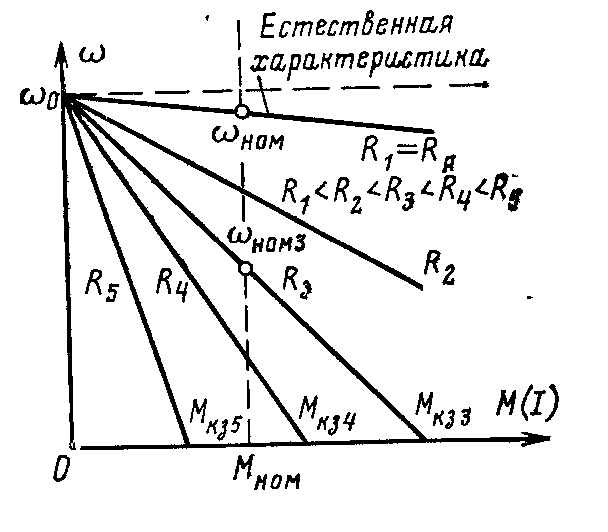
При Rдоб (при w) жесткость рег. характе-
ристик, стабильность при малых w низкая.
М=kФI - const, P=Mw - var.
Экономичность – низкая.
Диапазон D=1,5:1.
плавность при числа ступеней Rдоб, что
ведет к каналов СУ, практ. не более 3-х.
Для улучшения плавности применяют параметрическое импульсное регулирование.
Принцип регулирования: при помощи высокочастотного ключа реостат вводиться и выводиться в цепь якоря. Отпирание К происходит с помощью управляющих импульсов.
![]() -
скважность управляющих импульсов.
t1/t2–
время замкнутого/разомкнутого состояния
ключа.
-
скважность управляющих импульсов.
t1/t2–
время замкнутого/разомкнутого состояния
ключа.
![]()
"+" - простота и доступность;
"-" - низкие показатели качества.
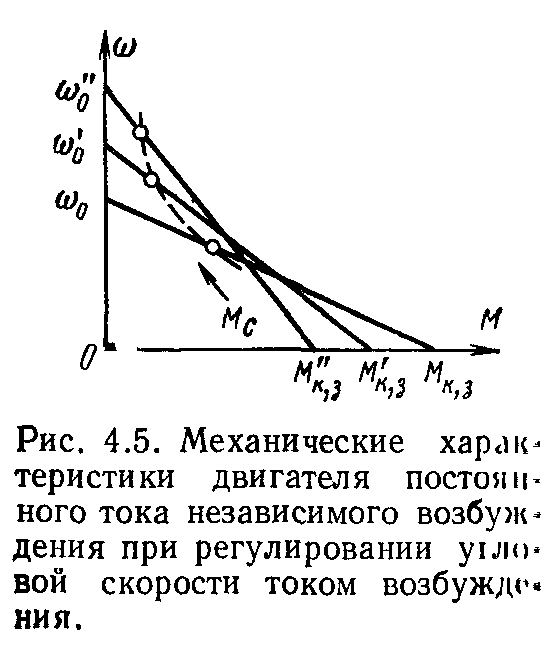
2) Ф=var
При регулировании изменением потока возбуждения регулирующее воздействие вносится в цепь возбуждения путем плавного изменения Rв.
ПКР:
Направление – теор. 2 зонное, практ., с учетом насыщенности магн. сист. – 1 зонное – вверх.
Плавность – высокая.
Экономичность – т.к. регулирование осущ. в маломощной цепи, то потери мощности в процессе регулирования очень малы, экономичная.
Стаб. – в обл. больших w жесткость мех. характеристик значительно снижается, поэтому стаб. низкая, а так же проявляется перегрузочной способности ЭД при ослаблении Ф.
Доп. нагрузка - Р-const, М – изменяется по гиперболическому закону, что является наиболее оптимальной ф-цией изменения момента на валу.
Диапазон - ограничивающими факторами яв-ся низкая стабильность в области больших w, а также перегрузочной способности ЭД при ослаблении Ф. (теор. D=5:1, практ. D=3:1).
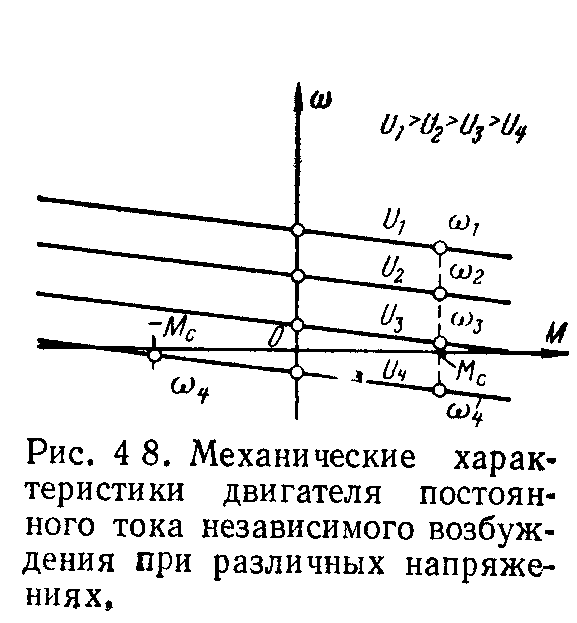
3) U=var
Регулирование w ДПТ НВ изменением U подводимого к якорю используется наиболее широко, при помощи устройств: регулируемых делителей U, Г-Д, ТП-Д, ШИР-Д.
![]() ;
;![]() .
.
Особенностью характеристик является то, что они расположены // естественной и ниже ее, т.к. изменять U можно только в сторону уменьшения относительно Uном.
ПКР:
Направление – 1 зонное вниз.
Плавность – при любом способе регулирования практически неограниченная.
Экономичность – зависит от способа реализации: ТП-Д – выше, Г-Д – ниже, в целом высокая.
Стаб. – в целом высокая, но у ТП-Д – ниже, чем у Г-Д.
Доп. нагрузка - т.к. Ф не изменяется, то при поддержании в процессе регулирования Iя = Iном М-const.
Диапазон – зависит от способа реализации D=10:1.
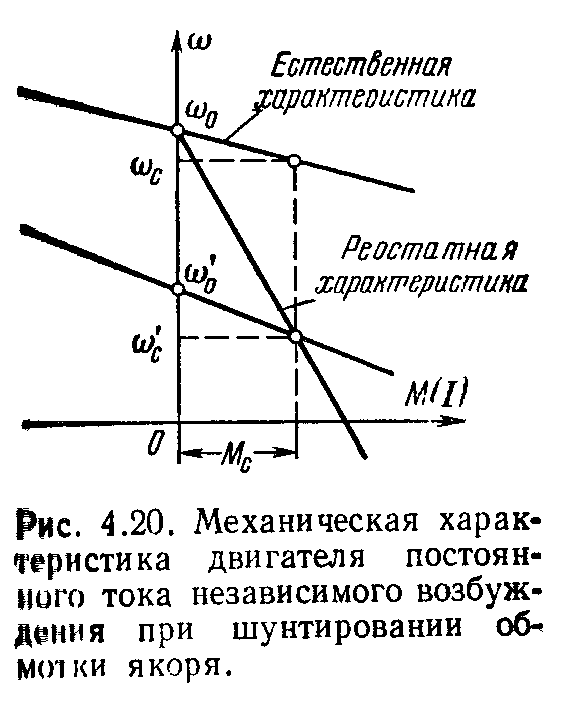
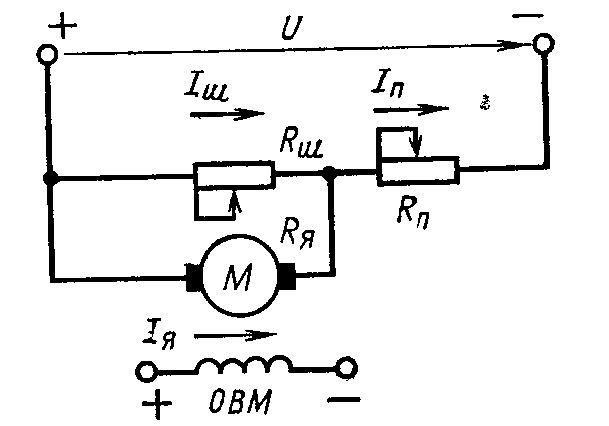
Регулирование w ДПТ НВ с использованием регулируемых делителей U или регулирование шунтированием обмотки якоря
Решая данную систему имеем:
![]() ;
;![]() .
.
Т.к. А<1, то регулировочные характеристики будут располагаться относительно естественной ниже. Т.к. Rд.А<Rд и Rя< Rя +Rд.А, поэтому перепад скоростей на регулировочных характеристиках определяющих их наклон будет меньше, чем при реостатном, но больше чем на естественной. Вследствие этого стабильность регулирования данным способом значительно выше, чем стабильность реостатного регулирования.
Чаще всего при этом способе регулирования изменяют либо Rш либо Rд, иногда оба одновременно.
ПКР
Направление 1 зонное – вниз;
Экономичность зависит от способа регулирования, но выше если изменять только Rш.
Доп. нагр. так как в процессе регулирования Ф на изменяется, то целесообразно при М=cont.
Плавность зависит от способа регулирования, но выше если изменять только Rш.
Стабильность – выше чем при реостатном и регулировании изменении Ф, но ниже чем в системах Г-Д, ТП-Д, ШИР-Д.
D=4-5:1.
Регулирование w ДПТ НВ изменением U в системе Г-Д
Осуществляется путем изменение Ф ГПТ питающего двигатель. Наиболее простой является система Ворд-Леонарда, в которой реализуется разомкнутая система регулирования.
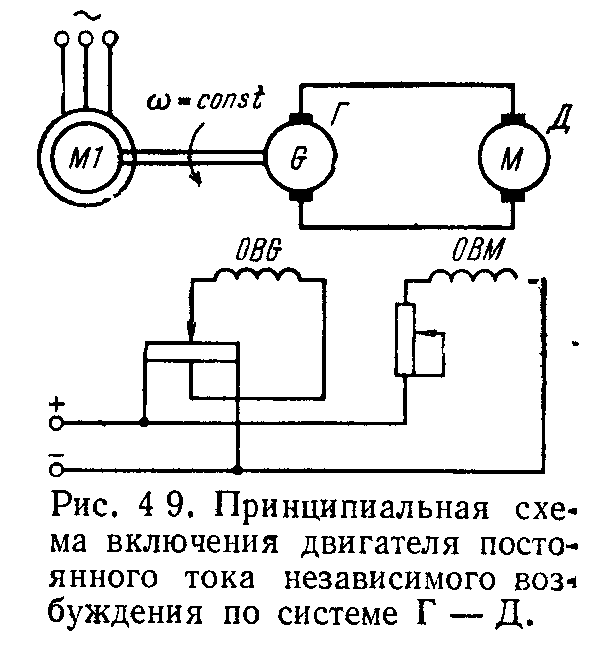
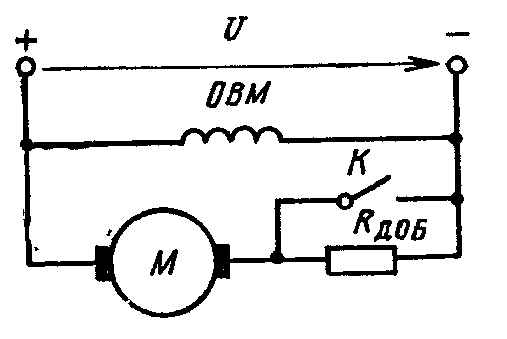
Рис.
4.18. Схема включения двигателя постоянного
тока независимого возбуждения при
импульсном регулировании напряжения
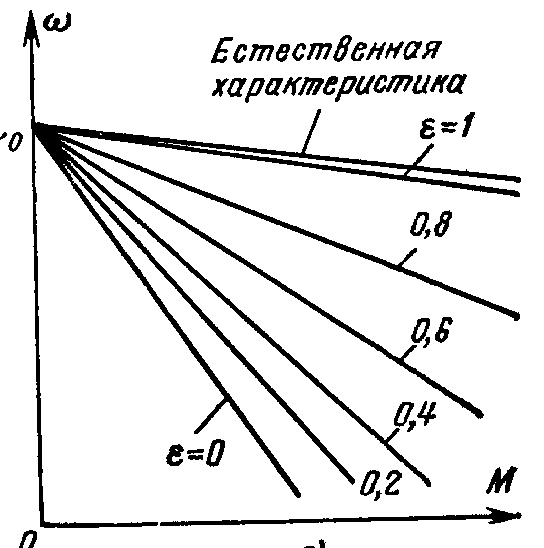
на якоре двигателя, механические
характеристики (е)
при ШИР
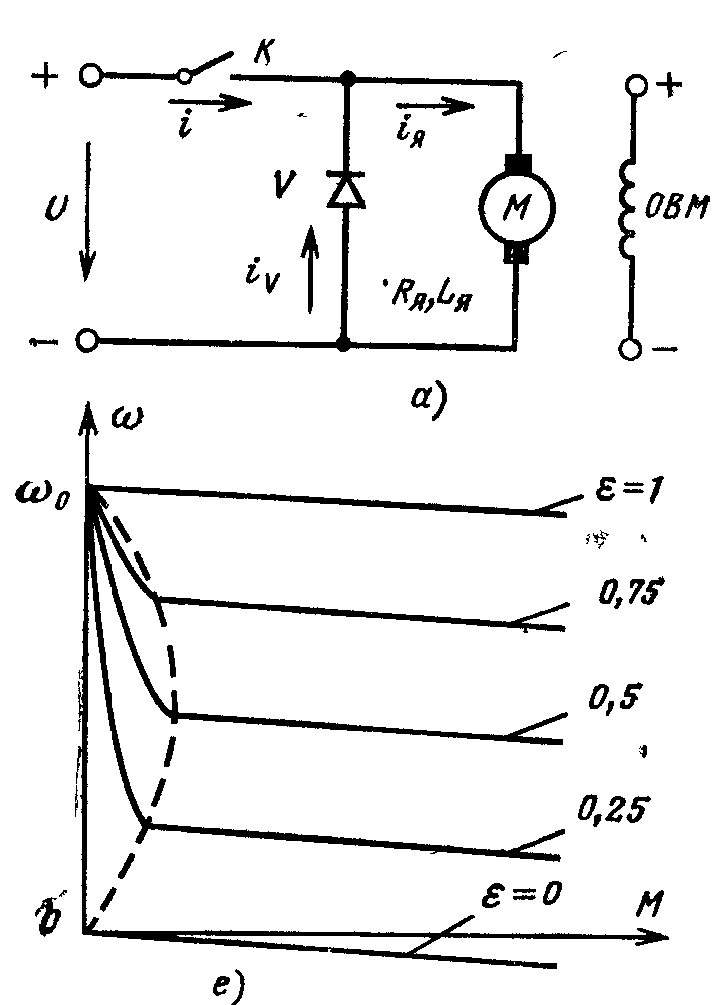
В этой системе регулирование вниз реализуется изменением U на зажимах якоря путем изменения Uвых. УВ питающего двигатель. Регулировочные характеристики чуть менее жесткие, чем у Г-Д. D=10:1.
Рис.
4. Механические характеристики ДПТ НВ,
питающегося от тиристорного УВ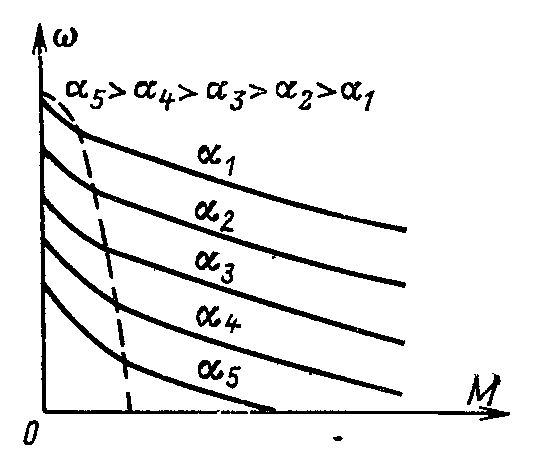
В этой системе регулирование вниз реализуется с помощью ШИР питающих двигатель. D несколько ниже за счет ограничений связанных с коммутационными перенапряжениями в ШИР и с необходимостью использования выходного вентиля большой мощности.
Регулирование w ДПТ ПВ
Уравнение
регулировочной характеристики ДПТ ПВ
имеет вид
![]() ,
следовательно регулирование возможно
изменением U,
Rд
и Ф.
,
следовательно регулирование возможно
изменением U,
Rд
и Ф.
U=var
Этот принцип регулирования реализуется с помощью рассмотренных ранее систем (Г-Д, ТП-Д, ШИР-Д). Для построения регулировочных характеристик ДПТ ПВ при U=var вводят понятие "граничная скоростная характеристика", "граничная угловая скорость", которые получаются при значениях Rя=0.
![]()
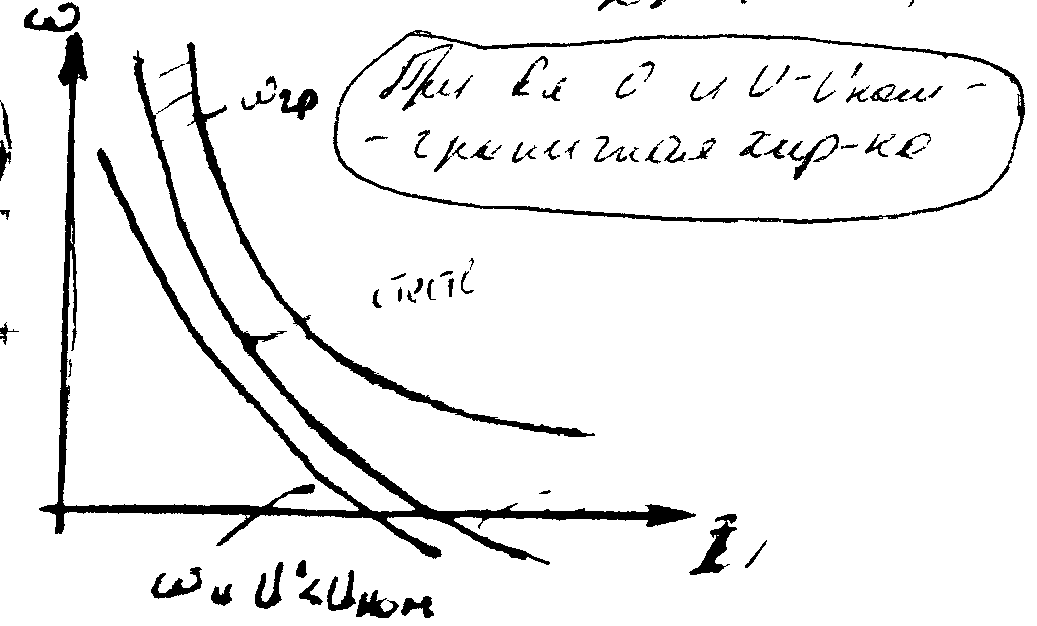
![]() Естественная МХ будет иметь перепад
скоростей по отношению к граничной
пропорционально току.
Естественная МХ будет иметь перепад
скоростей по отношению к граничной
пропорционально току.
![]() ,
где
,
где
![]() .
.
Для
построения и анализа этой характеристики
определим для разных значений I
перепад скоростей между естественной
и регулировочной
![]() ,
,
![]() .
.
Т.о. при одинаковых токах наклон характеристик по мере снижения U будет уменьшаться , а жесткость увеличиваться. Перегрузочная способность уменьшается.
ПКР
Направление 1 зонное – вниз;
Экономичность высокая.
Доп. нагр. регулирование при М=cont
Плавность высокая.
Стаб. – высокая (жесткость больше чем у естественной).
D=5:1 (ограничивается снижением перегрузочной способности двигателя на малых скоростях).
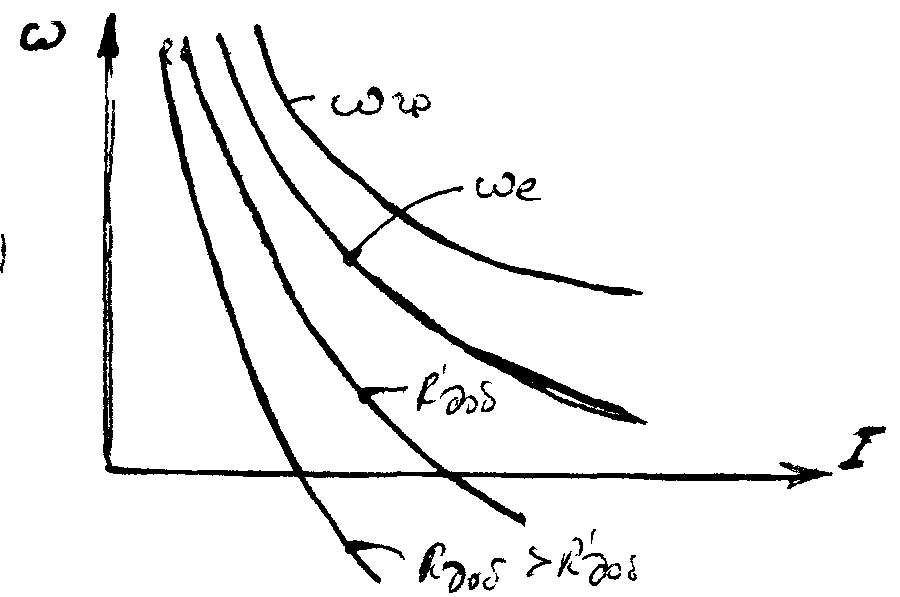
Rд=var
При этом регулировании вводиться Rд в цепь обмотки якоря.
![]()
![]()
![]()
ПКР
Направление 1 зонное – вниз;
Экономичность - низкая из-за больших потерь в Rдоб.
Доп. нагр. регулирование при М=cont
Плавность высокая.
Стаб. – низкая (жесткость снижается относительно естественной).
D=1,5-2:1.
Используется в приводах тяговых механизмов.
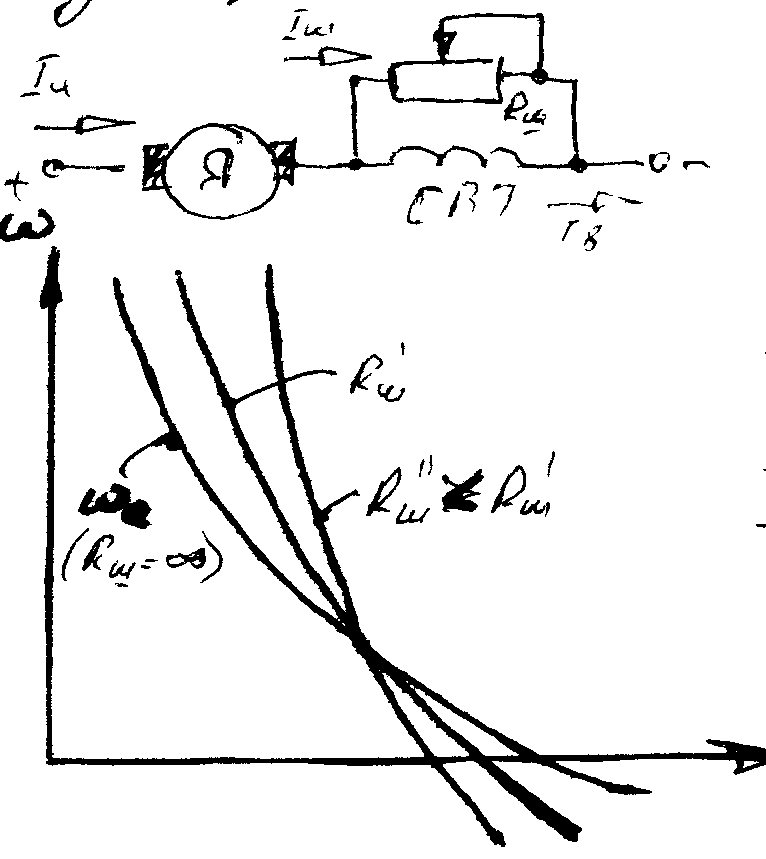
Ф=var
Учитывая то, что в процессе регулирования необходимо поддерживать Iя=Iном, регулирование производят либо шунтированием обмотки якоря, либо шунтированием ОВ.
Шунтирование обмотки якоря
При такой схеме соотношение токов будет иметь вид Iв=Iя+Iш.
Из уравнения видно, что при таком способе предполагают изменение Ф в сторону увеличения, тогда очевидно, что такой способ применим для двигателя с ненасышенной магнитной системой. При Iя=0 и Ф=0 и регулировочная характеристика пересекает ось ординат.
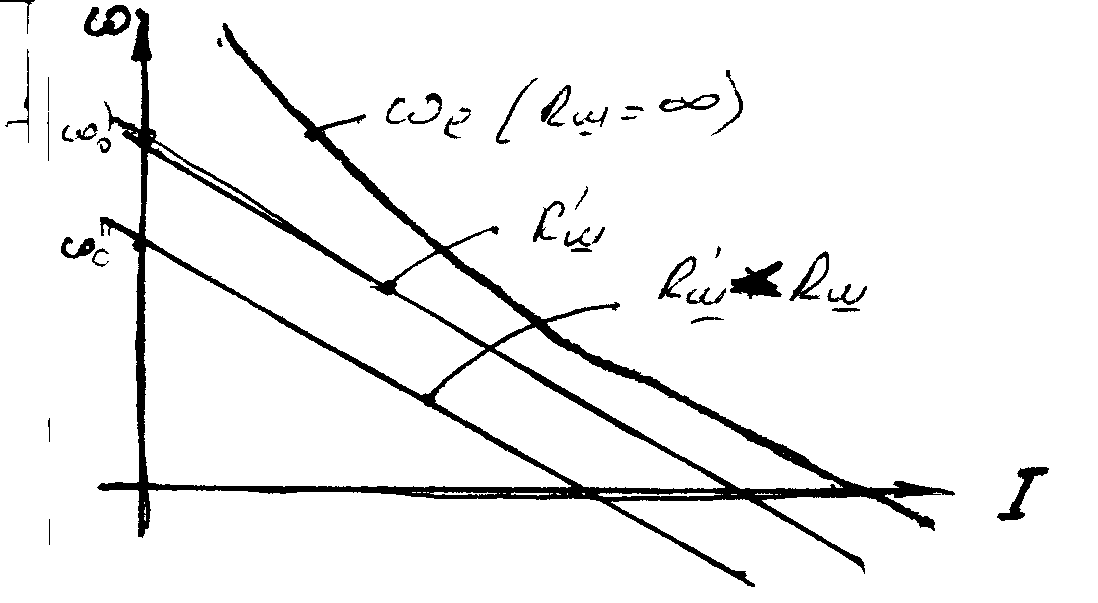
Направление 1 зонное – вниз;
Экономичность высокая, поскольку потери в цепи Rш незначительна.
Доп. нагр. при Р=cont М целесообразно изменять гиперболически М=Р/w.
Плавность высокая.
Стаб. – высокая.
D=4-5:1 (ограничивается насыщением сердечника).
Шунтирование ОВП
Iв=Iя-Iш
Изменять Ф можно только в сторону уменшения.
 ПКР
ПКР
Направление 1 зонное – вниз;
Экономичность высокая.
Доп. нагр. при Р=cont М целесообразно изменять гиперболически М=Р/w.
Плавность высокая.
Стаб. – низкая, т.к. жесткость меньше по сравнению с естественной.
D=4:1 (ограничивается насыщением сердечника).