

II. Регулирование ад изменением частоты u-я, подводимого к статору.
f=var, следовательно 0=2f/p=var.
Это частотное регулирование. В настоящее время этот способ обеспечивает наилучшие показатели качества, а также технико-экономические и потребительские показатели.
Принципы и законы частотного регулирования
ЭДС, наводимая в фазе обмотки статора Е1 с некоторой доли погрешности можно считать:
Е1U1; U1=4,44КобWФf;
Предположим, что изменение частоты f питающей сети осуществляется при постоянном действующим значении U1=const приложенном к его фазе.
Пусть f , тогда при U=const будет Ф. Это приведет к Iхх статора и как следствие к перегреву двигателя. Допустим f , U=const, следовательно Ф , произойдет перегрузка двигателя и (коэффициент мощности).
При этом двигатель оказывает отрицательное влияние на питающую сеть, что проявляется в потреблении большего количества Q (реактивная мощность).
При частотном регулировании одновременно с изменением частоты f необходимо изменять и напряжение U.
В зависимости от вида механизма, характер изменения f и U может быть различным. Соотношение между частотой и напряжением определяется так называемым законом частотного регулирования. Для различных механизмов с разными моментами статического сопротивления наиболее целесообразными являются следующие законы частотного регулирования:
Мс=const U/f=const.
Мс= изменяющийся линейно U2/f=const
Мс2 U/f2=const.
Частотный способ регулирования целесообразен для турбомеханизмов.
Р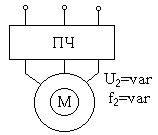 еализация
частотного регулирования. Классификация
ПЧ.
еализация
частотного регулирования. Классификация
ПЧ.
ПЧ можно классифицировать по:
. В зависимости от технических средств:
1. Электромашинные преобразователи частоты:
а) синхронные ПЧ (СПЧ);
б) асинхронные ПЧ (АПЧ);
2. Статические преобразователи частоты (ТПЧ);
Электромашинные ПЧ по сравнению со статическими имеют худшие масса - габаритные показатели, менее экономичны (большая установочная мощность) и менее совместимы с информационным каналом ЭП, однако более совместимы с питающей сетью.
. По структуре:
1. ПЧ с промежуточным звеном постоянного тока (ПЧ с ПЗПТ);
2. ПЧ с непосредственным преобразователем частоты (НПЧ);
ПЧ с ПЗПТ обладает большими функциональными возможностями, однако при этом имеют худшие энергетические показатели, чем НПЧ. До последнего времени в качестве статических преобразователей частоты в подавляющем большинстве использовались ПЧ с ПЗПТ, однако в последнее время эта тенденция изменилась с появлением новой элементной базы MOSFET и IGBT, а также с появлением новых подходов к синтезу систем управления.
ЭП с синхронным преобразователем частоты (СПЧ)
О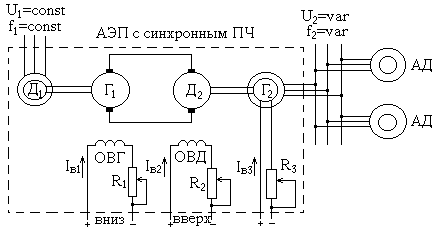 сновным
элементом является трехфазный синхронный
генератор (СГ) Г2, ток возбуждения которого
регулируется с помощью реостата R3,
тем самым изменяется амплитуда выходного
напряжения. При этом
генератора, а следовательно и частота
выходного напряжения, регулируется с
помощью системы Г-Д постоянного тока
(Г1 и Д2). В структуре системы Г1-Д2 образуется
ПЗПТ. Вал Г1 приводится во вращение
приводным двигателем Д1 (для средней
мощности - АД с КЗР; для большей мощности
- СД).
сновным
элементом является трехфазный синхронный
генератор (СГ) Г2, ток возбуждения которого
регулируется с помощью реостата R3,
тем самым изменяется амплитуда выходного
напряжения. При этом
генератора, а следовательно и частота
выходного напряжения, регулируется с
помощью системы Г-Д постоянного тока
(Г1 и Д2). В структуре системы Г1-Д2 образуется
ПЗПТ. Вал Г1 приводится во вращение
приводным двигателем Д1 (для средней
мощности - АД с КЗР; для большей мощности
- СД).
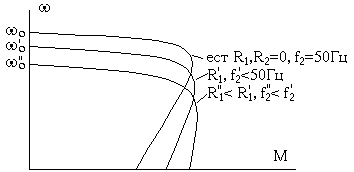
Регулировочное воздействие с целью изменения вносится в цепи возбуждения Г1 и Д2. При этом в первом случае осуществляется регулирование вниз, а во втором случае - вверх от основной частоты. При этом если Г2 изменяется от 0 до н, то выходная частота генератора изменяется от 0 до 50Гц. Если Г2 больше н, то частота f2 > 50Гц.
Автономное регулирование f и U невозможно. U на зажимах Г2: Uвых=E2=4,44KWФf;
Uвых/f=4,44KWФ.
При постоянстве Iв Г2 магнитный поток Ф=const, поэтому: Uвых/f=const.
Таким образом, в приводе с СПЧ возможна реализация только пропорционального закона регулирования. Изменение коэффициента К осуществляется с помощью R3.
=0; fвых=0; Uвых=0; при этом реостат R1 находится в полностью введенном положении, а реостат R2 выведен полностью, АД = 0. При вала Г2 - Д2 соответственно fвых и Uвых. При этом скорость АД возрастает.
При полностью выведенном R1 и R2=0: fвых=50Гц, ад=ном.
Для f выше 50Гц вводят R2: fвых>50Гц и ад > ном.
Регулирование в АЭП с электромашинным СПЧ:
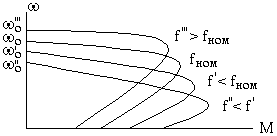
Позволяет регулировать как вниз с изменением Ег1, так и вверх, с изменением Ф Д2. При этом регулировочные характеристики имеют следующий вид:
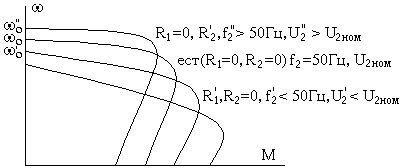
Для АД необходимо f2 и U2.
Для этого: R1 (R2=0) Ег1 д2 f2 , U2 ад .
Если необходимо , то R1=0: R2 Фд2 д2 f2 , U2 ад .
Критические моменты у всех характеристик одинаковые, т.к. регулирование происходит с одновременным изменением U и f.
А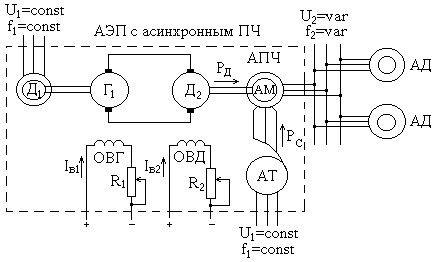 ЭП
с асинхронным электромашинным ПЧ
ЭП
с асинхронным электромашинным ПЧ
Основным элементом является - ПЗПТ Г1-Д2, которое представляет из себя систему Г-Д постоянного тока. В качестве ПЧ используется асинхронная машина, 3-х фазный ротор которой находится на одном валу с двигателем Д2. При этом с зажимов ротора (колец) снимается 3-х фазное переменное напряжение, питающее регулируемые АД.
При изменении вала Д2 - АМ изменяет частоту f на зажимах ротора:
Д2=0; f2=f1*S=50*1=50Гц;
Д2 f2; Д0=0АМ, f2=0.
Для того, чтобы f2 > 50Гц необходимо реверсировать вал Д2 - АМ. Для этого изменяют полярность Ег1 с помощью реверсирующих контактов, которые на схеме не показаны.
При этом статорная обмотка АМ питается от сети через АТ, при изменении Кт АТ будет изменять напряжение на зажимах АМ. КАТ=var U2=var. В отличие от СПЧ в АПЧ возможно автономное регулирование частоты и напряжения.
U/f=const; U2/f=const; U/f2=const.
Регулирование :
Вниз от основной частоты изменением Rг1, при этом естественные характеристики имеют вид:
Для увеличения изменяют полярность U-я на зажимах Д2 с помощью реверсирующих контактов, при этом изменяется направление вращения вала Д2 - АМ, частота f2 > 50Гц.
АЭП со статическими преобразователями частоты
АЭП со статическими преобразователями частоты обладает несравненными преимуществами по сравнению с электромашинными преобразователями, а именно значительно лучшие масса - габаритные показатели, отсутствие вращающихся частей, малая установленная мощность, значительно более высокий КПД, совместимость с информационным и управляющими каналами.
По виду преобразования энергии:
1 с непосредственным ПЧ (НПЧ);
2 с ПЗПТ:
а) преобразователь с управляемыми выпрямителями;
б) с неуправляемыми выпрямителями;
Инверторы различаются по способу коммутации УВ:
1 сетно - ведомые инверторы;
2 автономные инверторы (АИ), коммутация УВ происходит либо за счет подачи управляющих импульсов, либо с помощью коммутационных элементов;
АИ бывают следующих видов:
1 АИТ, используется L - фильтр, форма выходного I не зависит от характера нагрузки;
2 АИН, используется С - фильтр, форма выходного U не зависит от характера нагрузки;
V По структуре:
1 БУВ - блок управления выпрямителем;
2 БУИ - блок управления инвертором.
Непосредственный ПЧ (НПЧ)
В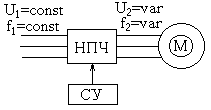 настоящее время область применения НПЧ
в автоматизированных ЭП постоянно
расширяется, что связано с существенными
преимуществами таких преобразователей,
а именно высокий КПД, более высокий
коэффициент мощности, существенно
лучший гармонический состав Uвых
(практически синусоидально). Недостаток
заключается в меньшими по сравнению с
ПЧ с ПЗПТ функциональными возможностями,
невозможность регулирования вверх,
сложная система управления.
настоящее время область применения НПЧ
в автоматизированных ЭП постоянно
расширяется, что связано с существенными
преимуществами таких преобразователей,
а именно высокий КПД, более высокий
коэффициент мощности, существенно
лучший гармонический состав Uвых
(практически синусоидально). Недостаток
заключается в меньшими по сравнению с
ПЧ с ПЗПТ функциональными возможностями,
невозможность регулирования вверх,
сложная система управления.
В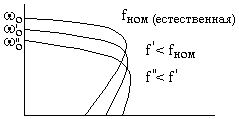 настоящее время в качестве систем
преобразования используют сложные
матричные системы управления, построенные
на векторном принципе управления.
настоящее время в качестве систем
преобразования используют сложные
матричные системы управления, построенные
на векторном принципе управления.
1 Направление - однозонное вниз;
2 Регулирование при М=const ;
3 Стабильность и плавность абсолютно высокие;
4 КПД до 85%, cos=0,85;
5 Диапазон, D=100:1, D=0,5 - 50Гц.
С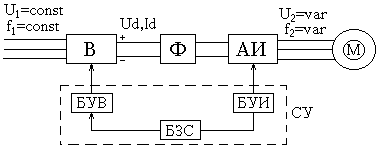 татический
преобразователь частоты с ПЗПТ.
татический
преобразователь частоты с ПЗПТ.
В - выпрямитель (управляемый или неуправляемый) предназначен для преобразования переменного 3-х фазного U-я в постоянное пульсирующее напряжение с постоянными значениями Ud и Id или изменяющимися Ud и Id.
Ф - сглаживающий фильтр, предназначен для уменьшения пульсации напряжения (и тока, или тока) на входе следующего блока.
АИ - автономный инвертор, предназначен для преобразования постоянного (изменяющегося или не изменяющегося) U в переменное с U2=var и f2=var, которое питает статорную обмотку двигателя.
БУВ и БУИ - системы импульсно - фазового управления.
В приводах, не требующих большого диапазона регулирования очень часто применяются преобразователи с управляемыми выпрямителями. В таких преобразователях управляемый выпрямитель выполняет функцию регулятора напряжения, а АИ - функцию регулятора частоты.
При этом в зависимость от элементной базы выпрямителя и инвертора, управление этими блоками осуществляется с помощью СИФУ, с помощью которой регулируются углы управления выпрямителем - , инвертором - .
Ud; Ud;
f2 .
Следует отметить, что угол управления связан с углом сдвига фаз между U и I в первичной обмотке входного трансформатора , поэтому регулирование скорости с помощью таких преобразователей в области очень малых скоростей, т.е. при /2 существенно ухудшает коэффициент мощности.
К преимуществам таких преобразователей следует отнести:
большие функциональные возможности
простота системы управления
Недостаток: прямоугольная форма выходного напряжения или тока.
АЭП с ПЧ с ШИР:
Избавиться от низкого cos позволяют ПЧ с широтно - импульсным регулированием напряжения. В структуре частотного преобразователя с ШИР как правило в качестве звена постоянного тока используется неуправляемый выпрямитель, а АИ может представлять из себя как АИН так и АИТ. При этом область применения АИН в таких преобразователях шире, чем АИТ. Управляемые элементы инвертора работают не в продолжительном, а в импульсном режиме. Частотное регулирование в преобразователях с ШИР реализует изменение U и I всех трех законов регулирования (U/f=const; U2/f=const; U/f2=const).
В ыходное
напряжение и ток каждой фазы инвертора
имеют в отличие от ранее рассмотренного
следующую форму:
ыходное
напряжение и ток каждой фазы инвертора
имеют в отличие от ранее рассмотренного
следующую форму:
В течении длительности полупериода выходное U или I соответственно изменяются по импульсному закону. При изменении соответственно t1 и t2 изменяется скважность управляющих импульсов: =t1/(t1+t2).
Соответственно изменяется и среднее напряжение: Uср=*U.
При этом в зависимости от требуемого значения амплитуды выходного напряжения, которое определяется изменением выходной частоты, изменяется скважность. К недостаткам таких преобразователей следует отнести необходимость применения в каждой фазе мощного выходного вентиля согласного с мощностью регулируемого двигателя. Такие преобразователи применяются в приводах малой мощности.
АЭП с ПЧ с ШИМ:
В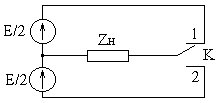 настоящее время такие преобразователи
являются наиболее широко используемые
и перспективным типом преобразователей,
при этом как по структуре, так и по
элементной базе, так и по принципу и
синтезу СУ в настоящее время насчитывается
достаточно большое количество
разновидностей таких преобразователей.
В качестве выпрямителя используется
неуправляемый выпрямитель, а БУИ
осуществляет управление по принципу
широтно - импульсной модуляции. Принцип
действия инвертора с ШИМ можно пояснить
на основе элементарной схемы замещения
такого инвертора, которая составлена
для одной схемы. Она имеет вид:
настоящее время такие преобразователи
являются наиболее широко используемые
и перспективным типом преобразователей,
при этом как по структуре, так и по
элементной базе, так и по принципу и
синтезу СУ в настоящее время насчитывается
достаточно большое количество
разновидностей таких преобразователей.
В качестве выпрямителя используется
неуправляемый выпрямитель, а БУИ
осуществляет управление по принципу
широтно - импульсной модуляции. Принцип
действия инвертора с ШИМ можно пояснить
на основе элементарной схемы замещения
такого инвертора, которая составлена
для одной схемы. Она имеет вид:
Выходное напряжение неуправляемого выпрямителя на схеме замещения показано в виде источника питания, разделенного на 2 одинаковые половины. Они попеременно подключаются на сопротивление нагрузки Zн, с помощью двухпозиционного ключа К.
Если К находится в положении 1, то на сопротивление нагрузки работает верхняя половина источника, ток будет направлен справа - налево, если в положении 2, то работает нижняя половина источника, ток протекает слева - направо.
Е![]() сли
длительность нахождения ключа в положении
1 обозначим t1,
в положении 2 - t2,
то среднее значение напряжения:
сли
длительность нахождения ключа в положении
1 обозначим t1,
в положении 2 - t2,
то среднее значение напряжения:
Если t1=t2, то Uср=0;
Если t1 t2, то рассчитывается по формуле;
t1+t2= - период модуляции;
t1/t2= - глубина модуляции;
=1/ - несущая частота модуляции;
Е![]() сли
изменять отношение (t1-t2)/(t1+t2)
по закону синуса, то:
сли
изменять отношение (t1-t2)/(t1+t2)
по закону синуса, то:
При реализации синусоидальной ШИМ Uвых складывается из импульсов одинаковой амплитуды, но различных по длительности и имеет форму, близкую к синусоидальной. При этом t1+t2, соответствующая определенной выходной частоте, будет постоянной. Существенным преимуществом таких преобразователей является получение формы выходного напряжения, близкой к синусоидальной (чаще трапецеидальной), отсутствие в структуре управляющего выпрямителя и как следствие высокие энергетические показатели и существенно меньшее отрицательное влияние на сеть.
1 Направление двухзонное;
2 Вниз при М=const, вверх при P=const;
3,4 Плавность и стабильность чрезвычайно высокие;
5 Энергетические показатели высокие;
6 D=1000-1.
Особенности частотного регулирования скорости СД
Частотное регулирование скорости СД является единственно возможным регулированием скорости, однако при этом следует учитывать как специфические свойства самих синхронных ЭП, так и специфические свойства их регулирования и управление регулированием. К специфическим свойствам промышленных СЭП можно отнести:
1 Их более высокий (по сравнению с АД) спектр мощностей. При этом следует учитывать, что СД в промышленных ЭП обычно работают с коэффициентом загрузки, приближенном к 1, что существенным образом сказывается на влияние отклонения Uпит на перегрузочную способность двигателя, не смотря на соотношение MU. Кроме того этому способствует такое негативное качество СД, как склонность к качанию.
К специфическим особенностям СЭП можно отнести:
1 Стабильность угловой скорости, независимо от момента нагрузки во всем диапазоне регулирования в пределах перегрузочной способности двигателя.
2 Высокая точность синхронного движения СМ с контролем по углу вращения осей.
3 Большое значение моментов на регулируемых скоростях при управлении напряжением и током возбуждения.
4 В частотно - регулируемом синхронном ЭП необходимо учитывать закономерности, связанные с зависимостью частоты напряжения, питающего статор с углом рассогласования .
П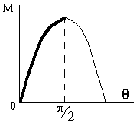 ри
постоянстве амплитуды напряжения,
питающего статор, угол
при малых скоростях вращения:
ри
постоянстве амплитуды напряжения,
питающего статор, угол
при малых скоростях вращения:
f M
f M
В связи с этим возникает необходимость при частотном регулировании СЭП одновременно с изменением f изменять U-е, его амплитуду и ток возбуждения Iв двигателя. Изменять напряжение нужно не всегда.
Если закон регулирования имеет вид: U/f=Uном/fном=const, (1) то зависимость тока возбуждения Iв при регулировании его от М на валу: Iв/Iвном=М/Мном. (2)
Если при этом Iв=Iвном, то в принципе поддержание момента можно реализовать только с помощью выражения (1). Такое регулирование СЭП называется регулированием при постоянном М на валу двигателя.
Е сли
регулирование производится при постоянной
мощности на валу двигателя, то в этом
случае оно осуществляется только
изменением частоты при постоянстве Iв
и питающего напряжения. Таким образом
регулирование СЭП является двухзонным,
т.е. при постоянстве момента реализуется
регулирование вниз, при P=const
- вверх. Очень часто в процессе регулирования
СД возникает задача стабилизации
скорости вращения привода при колебаниях
момента нагрузки на валу. В этом случае
такое регулирование производится при
регулировании некоторого значения
частоты.
сли
регулирование производится при постоянной
мощности на валу двигателя, то в этом
случае оно осуществляется только
изменением частоты при постоянстве Iв
и питающего напряжения. Таким образом
регулирование СЭП является двухзонным,
т.е. при постоянстве момента реализуется
регулирование вниз, при P=const
- вверх. Очень часто в процессе регулирования
СД возникает задача стабилизации
скорости вращения привода при колебаниях
момента нагрузки на валу. В этом случае
такое регулирование производится при
регулировании некоторого значения
частоты.
f=fном; U/Uном=M/Mном ;
Кроме того СЭП обладает еще одним очень важным свойством, отличающего его от АД. Характеризуется отключением обмотки статора от переменного напряжения и замыкание на тормозное сопротивление.
С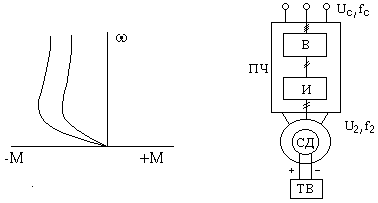 уществует
также способ фиксации ротора в заданном
положении без применения механических
тормозов, который заключается в том,
что статорная обмотка отключается от
3-х фазного напряжения и подключается
к источнику постоянного напряжения.
уществует
также способ фиксации ротора в заданном
положении без применения механических
тормозов, который заключается в том,
что статорная обмотка отключается от
3-х фазного напряжения и подключается
к источнику постоянного напряжения.
Такой способ возможен только в частотно - регулируемой системе частотного ЭП.
Кроме того, отличием частотно - регулируемого СЭП от АЭП является то, что в нем в меньшей степени, чем в асинхронном проявляется отрицательное влияние активной составляющей обмотки статора R1 на момент. При этом это влияние даже не велико на нулевых скоростях. Это влияние в регулируемых СЭП может быть скомпенсировано Iв.