

Выпрямители
С помощью выпрямителей осуществляется преобразование энергии переменного тока в энергию постоянного тока.
Выпрямители широко применяются в электроприводе постоянного тока, в частотно-регулируемых электроприводах переменного тока, в системах возбуждения синхронных двигателей.
Выпрямители классифицируются по нескольким признакам. По числу фаз напряжения переменного тока их подразделяют на однофазные и трехфазные, а по виду схемы силовой части — на мостовые и с нулевым выводом. По управляемости (возможности регулирования напряжения на выходе выпрямителя) их подразделяют на неуправляемые, полууправляемые и управляемые. Выпрямители, позволяющие изменять полярность своего выходного напряжения, называются реверсивными, они обычно состоят из двух комплектов нереверсивных выпрямителей.
В силовой части неуправляемых выпрямителей используются диоды и их модули, в полууправляемых — диоды и тиристоры, а управляемых — тиристоры. Для согласования уровней переменного (входного) напряжения и постоянного (выходного) напряжения в схемах выпрямителей используются трансформаторы, которые одновременно выполняют роль гальванической развязки цепей переменного и постоянного тока.
В промышленных установках применяют различные схемы преобразования переменного тока в постоянный, каждая из которых имеет свои достоинства и недостатки. При сравнении различных схем выпрямления учитывают следующие их технические характеристики: число полупроводниковых приборов, коэффициент пульсаций выпрямленного напряжения, габаритную мощность трансформатора.
Рассмотрим типовые схемы выпрямления переменного тока.
Однофазная мостовая схема
(рис. 5.6, а) содержит
четыре диода V1 — V4, соединенных по схеме
моста и подключенных к сети переменного
тока через трансформатор Т или напрямую.
Трансформатор позволяет согласовать
напряжение сети и выпрямленное напряжение
нагрузки. В одну диагональ моста (точки
1 и 3) включен источник переменного
напряжения, а в другую (точки 2 и 4) —
нагрузка RH.
Общая точка 2 катодных выводов служит
положительным полюсом выпрямителя,
а точка 4 анодных выводов — отрицательным.
В однофазной мостовой схеме диоды
работают поочередно парами VI, V3 и V2,
V4 (см. рис. 5.6, б). В положительный полупериод
напряжения U2ф
ток проходит через диод V1 нагрузку RH
к диоду V3. Так как в это время диоды V2,
V4 закрыты, к ним прикладывается обратное
напряжение, наибольшее значение
которого . В отрицательный полупериод
ток проходит через диод V2, нагрузку
RН
к диоду V4. При этом обратное напряжение
прикладывается к диодам VI и V3. Таким
образом, ток в цепи нагрузки в каждый
период проходит в одном направлении, и
его среднее значение зависит от
выпрямленного напряжения и с опротивления
нагрузки.
опротивления
нагрузки.
Выпрямленное напряжение Ud (рис. 5.6, в) имеет постоянную составляющую Ud.cp и переменную составляющую Ud.cp~ (заштрихованная область), которая пульсирует с двукратной частотой по отношению к частоте сети. Чем меньше переменная составляющая, тем меньше пульсация. При идеальном преобразовании переменного тока в постоянный переменная составляющая равна нулю. Важным показателем работы выпрямителя служит отношение амплитуды переменной составляющей к выпрямленному напряжению, называемое коэффициентом пульсации выпрямленного напряжения
где m — число фаз источника. Однофазные мостовые схемы из-за больших пульсаций выпрямленного напряжения применяют в основном в электроустановках малой мощности.
Трехфазная нулевая схема выпрямления (рис. 5.7, а) состоит из трех диодов. Анодные выводы диодов обычно подключают к обмоткам трансформатора, а катодные выводы — к общей точке. Нагрузку включают между нулевой точкой трансформатора и общей точкой диодов. При активной нагрузке RH ток через каждый диод протекает в течение 1/3 периода переменного тока, когда напряжение в одной фазе трансформатора больше, чем в других, а выпрямленный ток проходит по нагрузке непрерывно (см. рис. 5.7, в). В момент пересечения положительных значений напряжений каждой фазы трансформатора в точках а, б и в (см. рис. 5.7, б), называемых точками естественной коммутации диодов, ток прекращает проходить в одном диоде и начинает протекать через другой диод. Трехфазная нулевая схема позволяет получать выпрямленное напряжение более сглаженной формы с переменной составляющей Ud~ меньшей амплитуды, чем однофазная мостовая. Наибольшее обратное напряжение Uобр. max, поступающее на закрытый диод, равно амплитудному значению линейного напряжения (см. рис. 5.7, г).
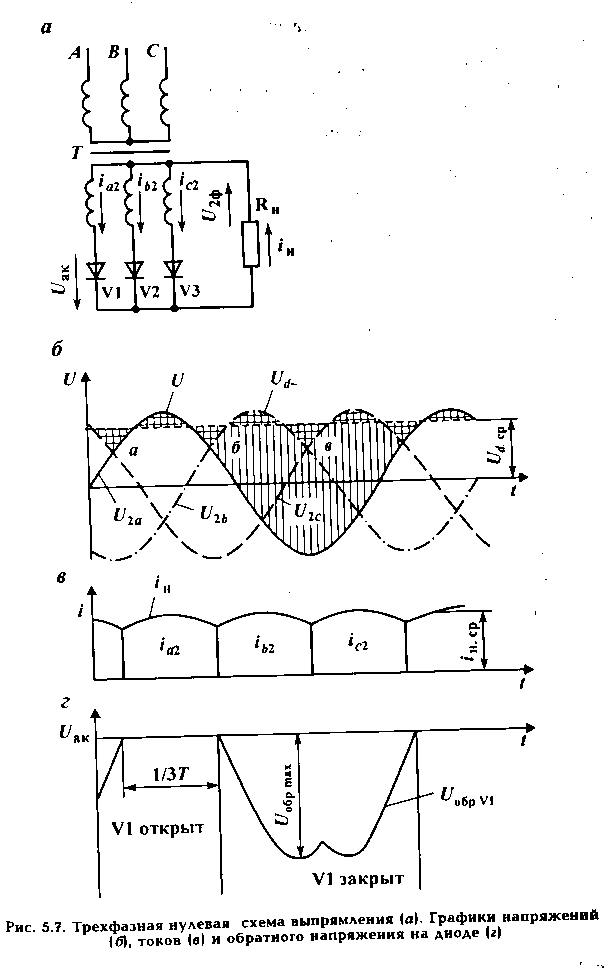 Недостаток
трехфазной нулевой схемы — прохождение
через вторичные обмотки тока (ia2,
ib2,
ic2)
только в одном направлении, что
создает магнитный поток подмагничивания,
вызывающий дополнительный нагрев
трансформатора. Поэтому схему широко
применяют только в выпрямительных
установках с трансформаторами, ток
вторичной обмотки которых не превышает
100 А.
Недостаток
трехфазной нулевой схемы — прохождение
через вторичные обмотки тока (ia2,
ib2,
ic2)
только в одном направлении, что
создает магнитный поток подмагничивания,
вызывающий дополнительный нагрев
трансформатора. Поэтому схему широко
применяют только в выпрямительных
установках с трансформаторами, ток
вторичной обмотки которых не превышает
100 А.
Т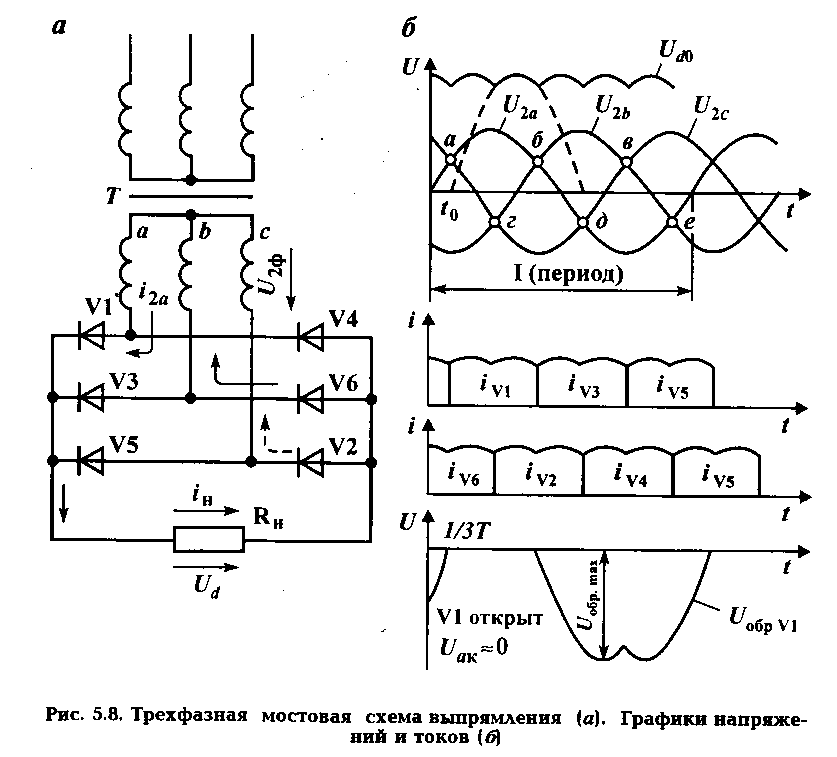 рехфазная
мостовая схема
выпрямления (рис. 5.8, а) состоит из
шести диодов, которые образуют две
группы: с общим катодным выводом (V1,
V3 и V5) и общим анодным выводом (V2, V4 и
V6). Диоды подключаются непосредственно
к сети или через трансформатор, первичные
и вторичные обмотки которого соединены
в звезду или треугольник.
рехфазная
мостовая схема
выпрямления (рис. 5.8, а) состоит из
шести диодов, которые образуют две
группы: с общим катодным выводом (V1,
V3 и V5) и общим анодным выводом (V2, V4 и
V6). Диоды подключаются непосредственно
к сети или через трансформатор, первичные
и вторичные обмотки которого соединены
в звезду или треугольник.
В нечетной группе (V1, V3 и V5) в течение каждой трети периода работает тот диод, у которого выше потенциал вывода (рис. 5.8, б), например, интервал а-б для диода V1. В четной группе в этот интервал времени работает тот диод, у которого катодный вывод имеет наиболее отрицательный потенциал (интервал а-г для диода V6 и г-б для диода V2) по отношению к общей точке анодных выводов. Таким образом, в интервале а-г (рис. 5.8, б) ток iн проходит от фазы а трансформатора через диод V1, нагрузку RH, диод V6, к фазе в трансформатора (см. рис. 5.8, а). В интервале г-б (см. рис. 5.8, б) ток проходит через диод V1, нагрузку RН и диод V2 (отмечено пунктирной линией).
В трехфазной мостовой схеме в любой момент времени при активной нагрузке ток проходит через два диода — один из нечетной, а другой — из четной группы. Диоды нечетной группы коммутируются в момент пересечения положительных участков синусоид (точки а, б, в), а четной группы — в момент пересечения отрицательных участков (точки г, д, е). В результате при наличии двух групп получают шестипульсное выпрямление (кривая Ud0, см. рис. 5.8, б).
Достоинствами трехфазных мостовых схем, широко применяемых в выпрямительных устройствах, являются: небольшой коэффициент пульсаций выпрямленного напряжения; малое обратное напряжение; малая габаритная мощность трансформаторов; отсутствие вынужденного подмагничивания, так как ток во вторичной обмотке трансформатора изменяет свое направление.
Основные технические характеристики различных схем выпрямления приведены в табл. 5.4.
Таблица 5.4 |
||||||
Основные технические характеристики схем выпрямления |
||||||
|
Число фаз |
Соотношение между электрическими параметрами схем выпрямления |
|
|||
Схема выпрямления |
выпрямления (пульс-ность), т |
Выпрямленным и фазным напряжениями, Ud0/U2ф |
Максимальным обратным и выпрямленным напряжениями, Uобр. max /Udo |
Фазным и выпрямленным токами, I2/Id |
Мощностью трансформатора и выпрямленной мощностью преобразователя, Sтр/Pd |
Коэффициент пульсации выпрямленного напряжения q = 2/(т2 - 1) |
Однофазная мостовая |
2 |
0,9 |
1,57 |
1,11 |
1,23 |
0,67 |
Трехфазная нулевая |
3 |
1.17 |
2,09 |
0,585 |
1,37 |
0,25 |
Трехфазная мостовая |
6 |
2,34 |
1,045 |
0,817 |
1,05 |
0,057 |
Примечание: I2 – ток вторичной обмотки трансформатора. |
||||||
Управляемые выпрямители позволяют преобразовать переменный ток в постоянный и плавно изменять выпрямленное напряжение от нуля до максимального значения.
В настоящее время в электроприводах постоянного тока и в системах возбуждения синхронных двигателей основной элементной базой при построении управляемых выпрямителей являются тиристоры.
Тиристоры — не полностью управляемые полупроводниковые приборы, обладающие двумя устойчивыми состояниями равновесия: открытым (проводящим ток) и закрытым (не проводящим тока). Тиристор (рис. 5.9, а), имеющий три электрода (анодный вывод А, катодный К и управляющий электрод У), начинает проводить ток в том случае, если к анодному выводу (по отношению к катодному выводу) приложен положительный потенциал и одновременно к управляющему электроду подается положительный управляющий сигнал. При приложении к анодному выводу положительного потенциала сопротивление тиристора будет зависеть от управляющего тока. При отсутствии управляющего сигнала (Iу = 0) сопротивление тиристора велико. При появлении управляющего тока (Iу = Iун) тиристор перейдет в открытое состояние и проводимость его будет высокой.
Тиристор отличается от транзистора тем, что ток управления только открывает, но не закрывает его. Закрывается тиристор при приложении к анодному выводу отрицательного напряжения.
Для управления тиристором используют систему импульсно-фазного управления (СИФУ), которая формирует управляющий импульс нужной формы и мощности, а также осуществляет сдвиг по фазе импульса относительно напряжения сети.
Рассмотрим работу тиристора, подключенного к однофазной сети на активную нагрузку (см. рис. 5.9, а). Предположим, что управляющий импульс в интервале Ωt0 - Ωt1 отсутствует (Iу = 0). В этом случае тиристор обладает большим сопротивлением в прямом направлении и ток через нагрузку RH практические не проходит (см. рис. 5.9, б).
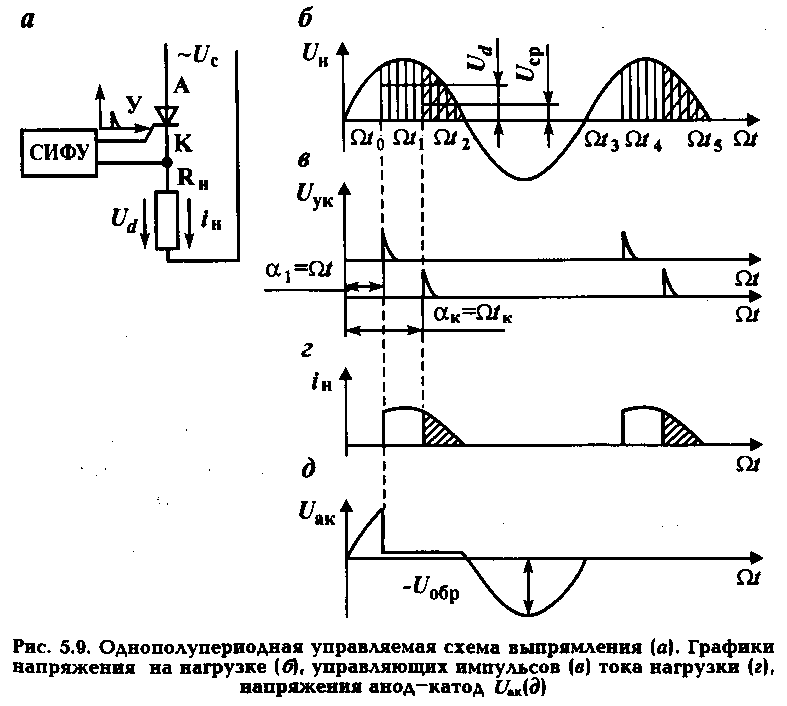 После
подачи управляющего импульса при
номинальном токе управления (Iу
= Iун)
тиристор открывается (см. рис. 5.9, в), т.е.
его сопротивление в прямом направлении
снижается. Под действием напряжения
сети Uc
через нагрузку RH
проходит ток Iн (см. рис. 5.9,
г), который зависит от напряжения
сети и сопротивления резистора (интервал
Ωt1
— Ωt2).
При отрицательном
напряжении на анодном выводе (интервал
Ωt2
— Ωt3)
тиристор обладает высоким сопротивлением
и ток через него не проходит. В этом
случае к тиристору прикладывается
обратное напряжение Uобр
(см. рис. 5.9,
д). На рис. 5.9, б, д приняты обозначения:
UH
— напряжение на нагрузке; Uaк
— напряжение анод — катод тиристора;
Uyк
— управляющее напряжение между
управляющим электродом и катодом.
После
подачи управляющего импульса при
номинальном токе управления (Iу
= Iун)
тиристор открывается (см. рис. 5.9, в), т.е.
его сопротивление в прямом направлении
снижается. Под действием напряжения
сети Uc
через нагрузку RH
проходит ток Iн (см. рис. 5.9,
г), который зависит от напряжения
сети и сопротивления резистора (интервал
Ωt1
— Ωt2).
При отрицательном
напряжении на анодном выводе (интервал
Ωt2
— Ωt3)
тиристор обладает высоким сопротивлением
и ток через него не проходит. В этом
случае к тиристору прикладывается
обратное напряжение Uобр
(см. рис. 5.9,
д). На рис. 5.9, б, д приняты обозначения:
UH
— напряжение на нагрузке; Uaк
— напряжение анод — катод тиристора;
Uyк
— управляющее напряжение между
управляющим электродом и катодом.
Для изменения среднего значения выпрямленного напряжения Ud необходимо сдвинуть по фазе управляющий импульс. Так, для уменьшения выпрямленного напряжения необходимо управляющий импульс подавать с отставанием по отношению к точке естественной коммутации тиристора (см. рис. 5.9, в). Сдвиг по фазе между точкой естественной коммутации тиристора и моментом подачи управляющего импульса называется углом регулирования α.
В электроприводах находят применение также сдвоенные тиристоры, называемые симмисторами, которые обладают свойствами встречно-параллельно соединенных тиристоров, но имеют лишь один управляющий электрод. При подаче управляющего сигнала симмистор открывается для обеих полуволн переменного тока.
Однофазный полууправляемый преобразователь переменного тока в постоянный. В полууправляемом однофазном преобразователе, имеющем в плечах мостовой схемы управляемые и неуправляемые диоды, выходное напряжение всегда положительно, поэтому поток энергии направлен из сети к двигателю. В электропроводах с полууправляемыми преобразователями рекуперация энергии в сеть невозможна.
Схема, графики токов и напряжений при симметричном управлении тиристорами и непрерывном токе якоря изображены на рис. 5.10.
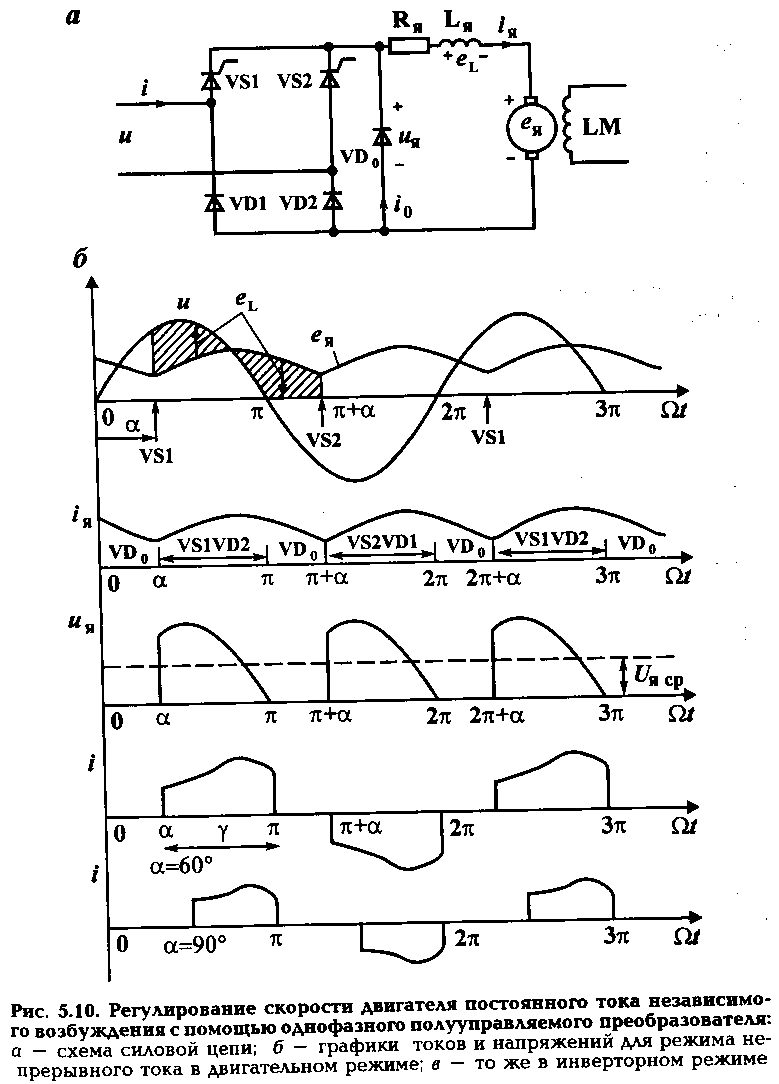 В
полууправляемом преобразователе
тиристор VS1 переходит в открытое
состояние в момент, соответствующий
углу α, а тиристор VS2 — углу π + α
относительно питающего напряжения
u.
В течение фазового интервала α < Ωt
< π двигатель подключается к сети
через тиристор VS1 и диод VD2, а напряжение
на зажимах якорной цепи uя
равно питающему u.
При Ωt > π напряжение и изменяет
полярность. Ток якоря iя
теперь потечет через обратный диод VD0,
поскольку тиристор VS1 закрыт. Обратный
диод выполняет функцию защиты
преобразователя от перенапряжений. В
фазовом интервале π < Ωt
< π+α цепь якоря закорочена обратным
диодом, в связи с чем напряжение на якоре
uя
= 0.
В
полууправляемом преобразователе
тиристор VS1 переходит в открытое
состояние в момент, соответствующий
углу α, а тиристор VS2 — углу π + α
относительно питающего напряжения
u.
В течение фазового интервала α < Ωt
< π двигатель подключается к сети
через тиристор VS1 и диод VD2, а напряжение
на зажимах якорной цепи uя
равно питающему u.
При Ωt > π напряжение и изменяет
полярность. Ток якоря iя
теперь потечет через обратный диод VD0,
поскольку тиристор VS1 закрыт. Обратный
диод выполняет функцию защиты
преобразователя от перенапряжений. В
фазовом интервале π < Ωt
< π+α цепь якоря закорочена обратным
диодом, в связи с чем напряжение на якоре
uя
= 0.
В интервале открытого состояния тиристора (α < Ωt < π) энергия поступает из сети и преобразуется в энергию, запасаемую в индуктивности якорной цепи Lя, кинетическую энергию движущихся частей электропривода и полезную работу. В фазовом интервале π < Ωt < π + α тиристор закрыт, запасенная в индуктивности энергия преобразуется в механическую, а продолжающий протекать по якорной цепи ток iя создает электромагнитный момент. В этом интервале энергия в сеть не возвращается.
Таким образом, в полууправляемом преобразователе происходит чередование интервалов, в одном из которых двигатель соединен с сетью через открытый тиристор, а в другом — отсоединен от сети.
Уравнения для якорной цепи двигателя, управляемого от полууправляемого преобразователя, имеют вид:
![]()
![]()
где eя — ЭДС двигателя.
При α = 0 и синусоидальной форме питающего напряжения среднее значение напряжения якорной цепи определяется по формуле
где U — действующее значение напряжения переменного тока на входе преобразователя.
В связи с невозможностью рекуперации энергии в сеть электродвигатель, управляемый от полууправляемого преобразователя, работает только в первом квадранте механических характеристик.
 Однофазный
полностью управляемый полупроводниковый
преобразователь переменного тока в
постоянный. В полностью
управляемом преобразователе, показанном
на рис. 5.11, а, тиристоры VS1 и VS3 переходят
в открытое состояние одновременно
в фазе α, a VS2 и VS4 — в фазе π + α. В этой
схеме двигатель постоянно связан с
сетью через пары тиристоров, причем в
фазовом интервале α < Ωt < π + α открыты
тиристоры VS1, VS3. В момент, соответствующий
π + α, тиристоры VS2 и VS4 переходят в открытое
состояние, при этом к тиристорам VS1
и VS3 через открытые тиристоры VS2 и VS4
прикладывается напряжение обратной
полярности, которое закрывает их.
Такая коммутация получила название
естественной.
Однофазный
полностью управляемый полупроводниковый
преобразователь переменного тока в
постоянный. В полностью
управляемом преобразователе, показанном
на рис. 5.11, а, тиристоры VS1 и VS3 переходят
в открытое состояние одновременно
в фазе α, a VS2 и VS4 — в фазе π + α. В этой
схеме двигатель постоянно связан с
сетью через пары тиристоров, причем в
фазовом интервале α < Ωt < π + α открыты
тиристоры VS1, VS3. В момент, соответствующий
π + α, тиристоры VS2 и VS4 переходят в открытое
состояние, при этом к тиристорам VS1
и VS3 через открытые тиристоры VS2 и VS4
прикладывается напряжение обратной
полярности, которое закрывает их.
Такая коммутация получила название
естественной.
Ток якоря двигателей iя, ранее протекающий через VS1 и VS3, теперь начнет протекать через тиристоры VS2 и VS4.
 В
течение фазового интервала α < Ωt < π
энергия из сети передается двигателю,
поскольку u,
i, и
uя,
iя
положительны, см. рис. 5.11, б. Напротив, в
течение фазового интервала π < Ωt < π + α
часть энергии из якорной цепи возвращается
в сеть, так как uя
и iя,
а также u
и i,
имеют разные знаки.
В
течение фазового интервала α < Ωt < π
энергия из сети передается двигателю,
поскольку u,
i, и
uя,
iя
положительны, см. рис. 5.11, б. Напротив, в
течение фазового интервала π < Ωt < π + α
часть энергии из якорной цепи возвращается
в сеть, так как uя
и iя,
а также u
и i,
имеют разные знаки.
Уравнение для якорной цепи двигателя, управляемого от полностью управляемого преобразователя, имеет вид:
![]()
При синусоидальной форме питающего напряжения среднее значение напряжения якорной цепи для полностью управляемого преобразователя определяется по формуле
При α > 90° среднее значение напряжения якорной цепи становится отрицательным. Если ЭДС изменяет свою полярность вследствие изменения направления вращения вала двигателя на противоположное, а направление тока в якорной цепи остается неизменным, то электрическая машина работает как генератор, отдавая энергию в сеть. Режим работы преобразователя, при котором энергия возвращается в сеть, называется инверторным и применяется для рекуперативного торможения двигателя. Поскольку из-за односторонней проводимости тиристоров ток якоря не изменяет свое направление, а полярность напряжения якорной цепи может изменяться, электропривод с одним комплектом полностью управляемого преобразователя может работать в первом и четвертом квадрантах механических характеристик.
В трехфазной мостовой схеме, в которой вместо диодов включены тиристоры (рис. 5.12, а), управляющие импульсы Uy1 – Uy2, поступающие от СИФУ, должны быть соответствующим образом сфазированы с напряжением трансформатора (сети), т.е. подаваться в нужные моменты времени. Сдвиг импульсов относительно базовой точки происходит в сторону отставания. За базовые необходимо брать точки а, б, в и г, д, е (см. рис. 5.12, б) естественного отпирания диодов. Если управляющие импульсы подавать на тиристоры в базовых точках, то получим наибольшее выпрямленное напряжение Ud0. При подаче управляющих импульсов с отставанием по отношению к точке естественного отпирания на угол α (рис. 5.12, б) тиристоры открываются позже, а среднее выпрямленное напряжение Ud ср будет меньше, чем наибольшее выпрямленное Ud0. Среднее выпрямленное напряжение ТП определяется по формуле
Ud ср = Udo cosα,
где α — угол регулирования ТП.
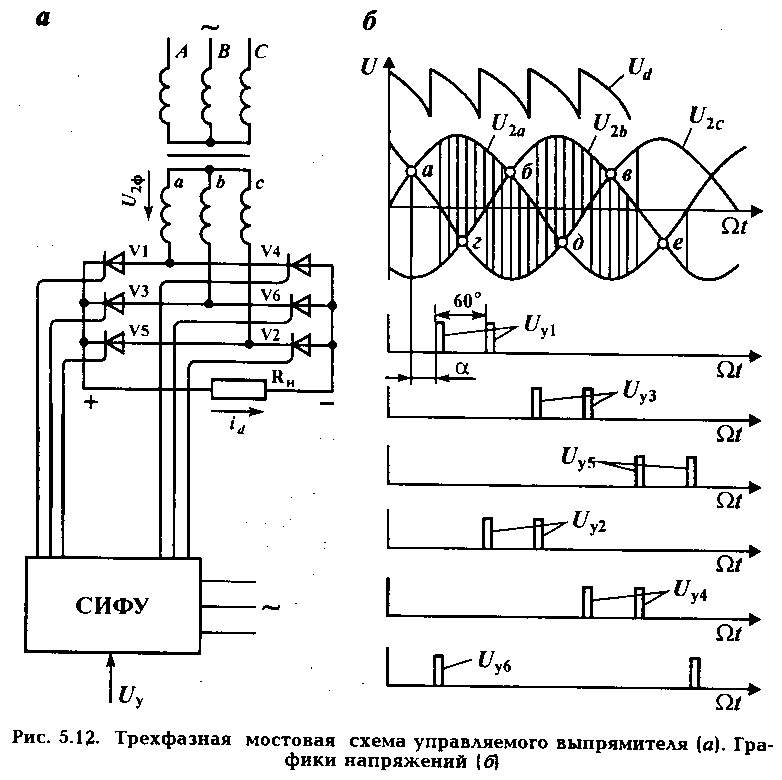 Поскольку
трехфазная мостовая схема имеет две
группы тиристоров, а ток в любой момент
протекает минимум через два тиристора,
СИФУ вырабатывает сдвоенные импульсы
(см. рис. 5.12, б), сдвинутые относительно
друг друга на 60 эл. град. В этом случае
имеет место одновременная подача
импульсов в тиристоры двух различных
групп (V1 и V6, V1 и V2, V3 и V2, и т.д.). Наличие
двух групп тиристоров обеспечивает
шестипульсное выпрямление (кривая Ud,
см. рис. 5.12, б).
Поскольку
трехфазная мостовая схема имеет две
группы тиристоров, а ток в любой момент
протекает минимум через два тиристора,
СИФУ вырабатывает сдвоенные импульсы
(см. рис. 5.12, б), сдвинутые относительно
друг друга на 60 эл. град. В этом случае
имеет место одновременная подача
импульсов в тиристоры двух различных
групп (V1 и V6, V1 и V2, V3 и V2, и т.д.). Наличие
двух групп тиристоров обеспечивает
шестипульсное выпрямление (кривая Ud,
см. рис. 5.12, б).