

Диаграмма изменения напряжения на зажимах статора двигателя. Основные способы управления
Устройство плавного пуска осуществляет пуск электродвигателя плавным нарастанием напряжения на статоре при одновременном регулировании тока или момента двигателя.
Преимуществом УППТ по сравнению с традиционными способами пуска является предоставление пользователю широких возможностей программными средствами осуществлять настройку устройства для конкретного применения. Эти возможности обеспечиваются широким диапазоном изменения параметров диаграммы изменения напряжения на зажимах статора двигателя и выбором способа управления.
Диаграмма изменения во времени напряжения на зажимах статора двигателя, реализуемая большей частью УППТ, изображена на рис. 13.
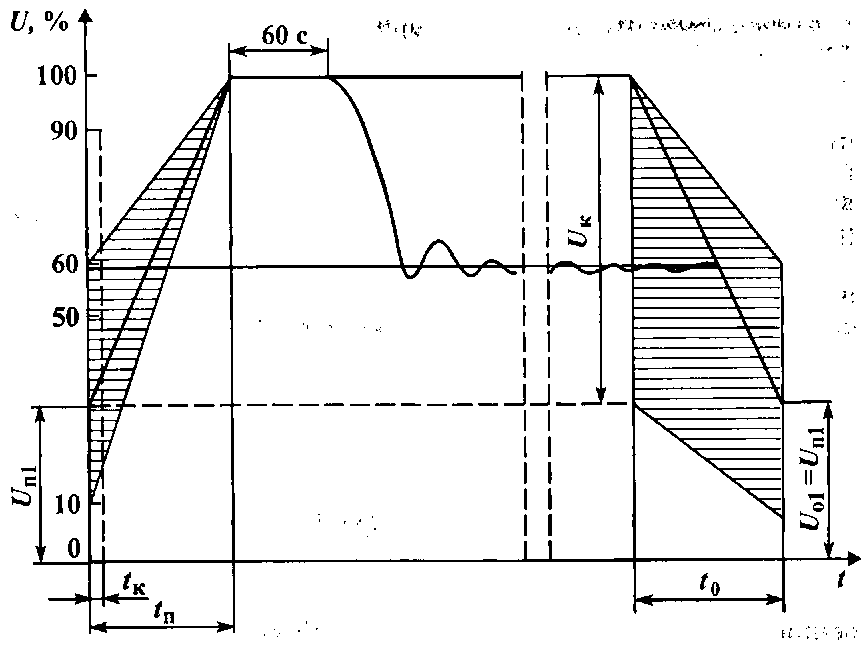
Рис. 13. Диаграмма изменения напряжения на зажимах статора двигателя, реализуемая устройством плавного пуска
Приведем параметры пусковой диаграммы
изменения напряжения, реализуемой УППТ
концерна ABB. Первоначальная уставка
пускового начального напряжения
![]() может варьироваться в пределах 10-60 % от
номинального значения, что обеспечивает
необходимый уровень пускового момента
АД. Если при пуске АД требуется создать
увеличенный пусковой момент для
преодоления момента сопротивления,
обусловленного силами трения покоя, то
возможно кратковременное в течение
времени
может варьироваться в пределах 10-60 % от
номинального значения, что обеспечивает
необходимый уровень пускового момента
АД. Если при пуске АД требуется создать
увеличенный пусковой момент для
преодоления момента сопротивления,
обусловленного силами трения покоя, то
возможно кратковременное в течение
времени
![]() = 0,5 с приложение к статору импульса
напряжения с амплитудой 90 % от
= 0,5 с приложение к статору импульса
напряжения с амплитудой 90 % от
![]() .
Продолжительность пуска
.
Продолжительность пуска
![]() может варьироваться в пределах от 0,5 до
60 с, а продолжительность торможения
может варьироваться в пределах от 0,5 до
60 с, а продолжительность торможения
![]() — от 0 до 240 с. Пусковой ток АД может
устанавливаться в пределах (2 – 5)
— от 0 до 240 с. Пусковой ток АД может
устанавливаться в пределах (2 – 5)
![]() ,
а диапазон изменения конечного напряжения
,
а диапазон изменения конечного напряжения
![]() — 30—100 % от
.
— 30—100 % от
.
В случае снижения нагрузки на валу АД УППТ автоматически снижает напряжение на зажимах статора АД до значения 0,6 , что приводит к увеличению коэффициента мощности ( ) и экономии электроэнергии без ущерба работоспособности привода. Однако это снижение напряжения возможно не ранее чем через 60 с после завершения разгона двигателя. Режим энергосбережения становится недоступен, если в системе управления предусмотрен шунтирующий контактор, который подключает напрямую по окончании процесса пуска АД к питающей сети в обход УППТ.
В УППТ могут быть реализованы следующие способы управления: напряжением на зажимах статора, током двигателя, моментом двигателя.
Управление напряжением обеспечивает плавный пуск двигателя, однако ток и момент двигателя при пуске не контролируются. Поскольку отсутствуют обратная связь по току и контроль момента двигателя, при пуске возможны броски тока (рис. 14, а). Данный способ управления не пригоден для электроприводов с тяжелым пуском.
Управление током обеспечивает при пуске ограничение пускового тока. Изменение напряжения на зажимах статора происходит таким образом, что в течение большей части времени пуска ток двигателя поддерживается постоянным (рис. 14, б).
Уровень ограничения пускового тока является основным параметром пуска и устанавливается пользователем в зависимости от конкретного применения.
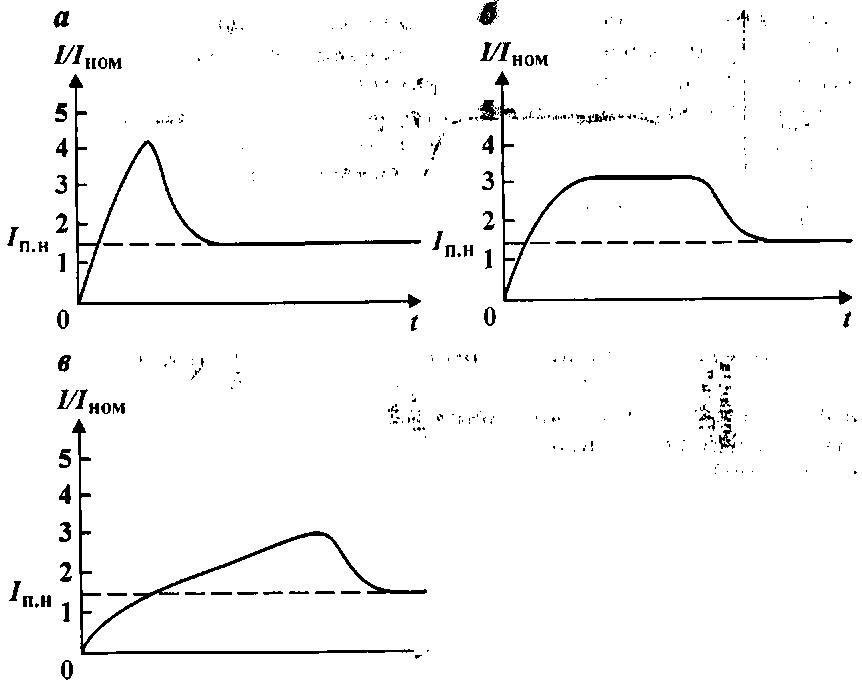
Рис.
14. Графики изменения во времени тока
при пуске электродвигателя от УППТ при
способах управления: а
— напряжением
на зажимах статора; б
— током;
в
— моментом двигателя;![]() — ток полной нагрузки
— ток полной нагрузки
Осциллограмма пускового тока двигателя, управляемого от устройства плавного пуска при управлении током, показана на рис. 15.
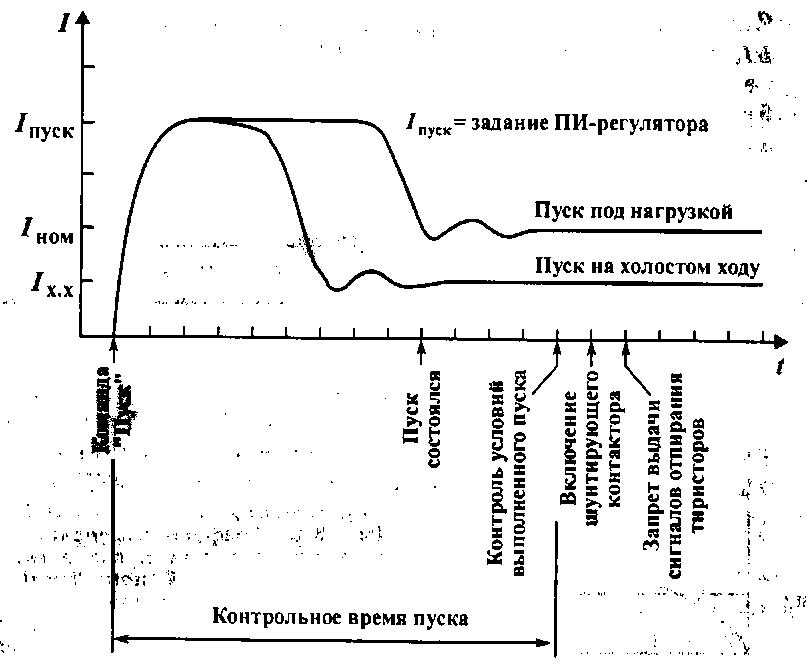
Рис. 15. Осциллограмма пускового тока двигателя, управляемого от устройства плавного пуска при управлении током
Управление моментом является наиболее совершенным способом пуска. В этом случае УППТ следит за требуемым значением момента, обеспечивая пуск с минимальным значением тока. Применение системы управления с контролем момента двигателя обеспечивает линейный график изменения скорости во времени, т.е. пуск при постоянном ускорении.
Например, в УППТ Altistart 48 предусмотрена запатентованная компанией «Schneider Electric» система регулирования момента (TCS), обеспечивающая поддержание постоянных значений момента при пуске и торможении, ограничение механических ударов в кинематической цепи.
В некоторых УППТ возможна реализация специальной функции управления насосом. График изменения во времени тока для такого управления показан на рис. 14, в.
В случае пробоя тиристора предусмотрена функция аварийного прямого пуска двигателя, которая доступна только при управлении напряжением. При аварийном пуске управление (режим энергосбережения) и функции управления торможением двигателя блокируются.
С помощью УППТ могут быть реализованы следующие способы торможения двигателя:
скатом (плавным изменением напряжения на зажимах статора АД);
свободным выбегом (отключением АД от сети);
динамическим торможением (подачей в обмотку статора АД постоянного тока);
противовключением.
Для предохранения двигателя от замерзания и перепадов температуры, что может привести к образованию конденсата и вследствие этого к увлажнению изоляции, предусмотрен предварительный обогрев двигателя.
При этом в обмотку статора заторможенного двигателя подается небольшой ток. Значение тока и время подогрева настраиваются программными средствами. При предварительном подогреве двигателя защита от тепловой перегрузки блокируется.