

Контрольные вопросы
1 Что называется соединением звездой приёмников энергии?
2 Что называется фазным и линейным напряжениями?
3 Что называется фазным и линейным токами?
4 Каковы соотношения между линейными и фазными напряжениями при соединении приёмников звездой при симметричной нагрузке фаз?
5 Каково назначение нейтрального провода?
6 К чему приводит обрыв или отсутствие нейтрального про вода при несимметричной нагрузке фаз?
7 Начертите векторную диаграмму напряжений и токов для симметричной чисто активной нагрузке фаз.
8 В каких условиях можно обойтись без нейтрального провода?
9 Как определить ток в нейтральном проводе?
Лабораторная работа № 4 (реальная) Снятие рабочих характеристик трёхфазного асинхронного двигателя с короткозамкнутым ротором
Цель работы.
1 Изучить устройство трёхфазного асинхронного двигателя с короткозамкнутым ротором.
2 Испытать асинхронный двигатель с помощью тормоза.
Теоретические сведения
Асинхронный двигатель трехфазного тока представляет собой электрическую машину, служащую для преобразования электрической энергии трёхфазного тока в механическую.
Асинхронный двигатель – двигатель переменного тока, у которого скорость вращения ротора при постоянной частоте тока в сети изменяется в зависимости от нагрузки
Асинхронный двигатель состоит из двух основных частей: неподвижной – статора и вращающейся – ротора. Статор состоит из чугунного, стального или алюминиевого корпуса, внутри которого находится полый цилиндр, собранный из тонких изолированных друг от друга листов электротехнической стали. На внутренней поверхности цилиндра имеются пазы, в которых размещается трёхфазная обмотка статора, состоящая из трёх одинаковых частей, называемых фазами. Выводы начала и конца одной фазы сдвинуты в пространстве относительно аналогичных выводов другой фазы на 1200. Ротор представляет собой цилиндр, собранный, так же как и сердечник статора, из отдельных листов электротехнической стали, надёжно укреплён на валу машины и имеет в пазах, расположенных вблизи его поверхности, короткозамкнутую обмотку.
В зависимости от устройства ротора асинхронные двигатели могут быть с контактными кольцами (с фазным ротором) и с короткозамкнутым ротором. На рисунке 1 показан асинхронный двигатель с короткозамкнутым ротором.

Рисунок 1 – Асинхронный двигатель с короткозамкнутым ротором в разобранном виде:
1 – статор, 2 – ротор, 3 – подшипниковые щиты, 4 – вентилятор, 5 – отверстия для охлаждающего воздуха, 6 – коробка, прикрывающая зажимы
Подключим обмотку статора к сети трёхфазного переменного тока. Внутри статора возникает магнитное поле, вращающееся с частотой:
![]() ,
где (1)
,
где (1)
f – частота токов в обмотке статора,
p – число пар полюсов обмотки статора.
Магнитные линии поля пересекают обмотку неподвижного ротора и индуцируют в ней ЭДС. Под действием ЭДС в обмотке ротора протекает ток. Ток ротора, взаимодействую с вращающимся магнитным полем, создаёт вращающий момент, под действием которого ротор начинает вращаться в ту же сторону, что и поле с частотой:
![]() ,
где (2)
,
где (2)
s – скольжение, определяемое по формуле:
![]() (3)
(3)
При работе электродвигателя без нагрузки (холостой ход) скольжение очень мало. С увеличением нагрузки на валу двигателя частота вращения ротора уменьшается, а скольжение увеличивается. Чем больше мощность двигателя, тем меньше его скольжение.
Частота вращения ротора может быть измерена с помощью тахометра.
Для изменения направления вращения асинхронного двигателя следует поменять местами два любых провода из трёх, идущих к обмоткам статора двигателя.
Свойства асинхронного двигателя определяют по его механической характеристике и о рабочим характеристикам.
Зависимость между вращающим моментом М и скольжением s называют механической характеристикой, которая показана на рисунке 2.
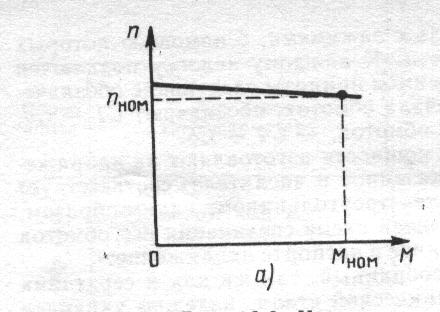
Рисунок 2 – Механическая характеристика асинхронного двигателя
Рабочие характеристики представляют собой зависимость мощности Р1, потребляемой двигателем, тока I1, коэффициента мощности cosφ1, к. п. д. η, вращающего момента М, скорости вращения n, скольжения s от полезной мощности P2 на валу двигателя при неизменном напряжении U1 на зажимах двигателя и при неизменной частоте f. Рабочая характеристика представлена на рисунке 3.
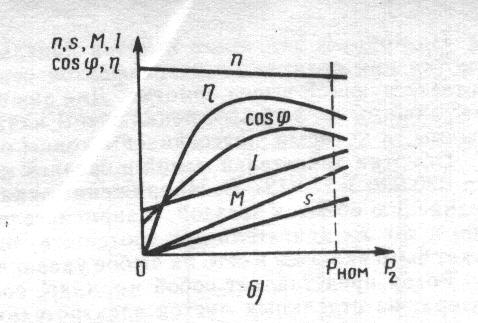
Рисунок 3 – Рабочие характеристики асинхронного двигателя
Прямой пуск асинхронного двигателя с короткозамкнутым ротором можно производить включением рубильника (магнитного пускателя) и т.д. При прямом пуске на двигатель подаётся полное напряжение сети. При таком способе пуска возникают большие пусковые токи, в 2 – 7 раз превышающие номинальные токи двигателей. Однако в этом случае на валу двигателя развивается начальный вращающий момент Мп, составляющий 1,2 – 2,2 номинального момента Мном, что достаточно для разгона большинства устройств, пускаемых без нагрузок.
Трёхфазный асинхронный двигатель с короткозамкнутым ротором характеризуется такими номинальными величинами: мощностью Р2 на валу двигателя, линейным напряжением Uном, линейным током Iном, типом соединения фаз статора, частотой переменного тока fном, частотой вращения ротора nном, коэффициентом мощности cosφном и к.п.д. ηном, которые приведены на табличке машины.
Для нагрузки электродвигателей широко применяют электромагнитные тормозные устройства.
Приборы и оборудование
1 Источники питания (трёхфазная сеть переменного тока, сеть постоянного тока)
2 Трёхфазный асинхронный электродвигатель с короткозамкнутым ротором
3 Амперметр и вольтметр
4 Двухэлементный ваттметр ферродинамической системы
5 Реостат
6 Тахометр
7 Электромагнитный тормоз
8 Трёхполюсной и двухполюсной автоматические выключатели
9 Соединительные провода