

5. 2 Декомпозиция задачи синтеза системы, иерархия целей исследования и показателей эффективности
Задача проектирования СТС вследствие большой сложности неизбежно разделяется на иерархическую систему частных задач по проектированию компонентов СТС. Подобным образом расчленяется и процесс исследования СТС. Таким образом, и проектировщики (т. е. лица, принимающие решения), и исследователи ищут предпочтительное решение лишь для некоторой части полной задачи, рассматривая ее как самостоятельную задачу. Другие задачи временно откладываются, возможные решения смежных вопросов временно не принимаются во внимание или считаются известными. Расчленение сложной проблемы синтеза СТС на иерархическую систему частных задач является концепцией, на которой' основывается проведение анализа СТС, и носит название декомпозиции проблемы.
Цель декомпозиции — упростить синтез СТС путем оптимизации: решения частных задач. Такой подход к синтезу СТС называется субоптимизацией. Синтез при этом осуществляется путем объединения решений частных задач и усовершенствования этих решений с учетом взаимных связей между частными задачами.
Декомпозиция совместно с субоптимизацией делает проблему синтеза СТС решаемой, так как ни один человек и ни один коллектив не в состоянии охватить всю проблему в целом и принять все проектировочные решения.
Рассмотрение частной задачи как самостоятельной может привести к тому, что критерии в частных задачах, кажущиеся правдоподобными, будут несовместимыми с критериями для СТС в целом. Чтобы этого не случилось, необходимо при субоптимизации осуществить системный подход, который будет выражен в подчинении показателей эффективности подсистем показателям эффективности вышестоящих систем. Такая иерархия показателей эффективности будет соответствовать иерархии целей и задач.
Рассмотрим в качестве примера вопрос о наилучшем автопилоте для ЛА и возьмем крайний случай. Если критерием служат минимальные затраты для достижения высокой точности управления, то автопилот может оказаться слишком большим, чтобы его можно было разместить на реальном ЛА. Хорошее решение выбора автопилота может быть получено, если критерий выбора автопилота согласован с критерием выбора наилучшего ЛА. В частности, это означает, что габариты и масса автопилота должны быть, возможно меньшими или, по крайней мере, ограниченными. Как следует из, примера, при выборе критерия необходимо добиваться его согласования с критерием более высокого уровня.
Из всего сказанного следует два общих вывода.
Во-первых, исследователю необходимо постоянно помнить о преимуществах и недостатках метода декомпозищш суболтимизации и всегда выбирать разумное компромиссное решение по расчленению проблемы, которое может избежать как слишком обширных, так и чрезмерно суженных задач. Во-вторых, для успешного проведения субоптимизации необходимо, чтобы показатели эффективности, выбираемые в каждой частной задаче, были увязаны в единую логическую систему показателей эффективности.
Расчленение проблемы синтеза СТС на иерархическую систему •частных задач и построение для этих задач системы показателей эффективности взаимосвязано с расчленением цели синтеза на ее компоненты. Построение соответствующего дерева целей можно провести различными способами в зависимости от позиции (подхода) исследователя, выбирающего тот или иной объективный признак для декомпозиции проблемы синтеза и построения иерархии целей. В качестве основных можно указать три подхода.
В первом подходе за основу принимается структура исследуемой СТС и каждому ее компоненту ставится в соответствие цель исследования этого компонента.
Пусть, например, перед исследователем поставлена цель разработки самолета-перехватчика (см. рис. 1.1). Эта цель <2г будет расчленена на цели более низкого уровня рг-_1 разработки агрегатов самолета: планера, силовой установки, системы управления огнем и т. д. В сбою очередь, цель разработки системы управления огнем расчленяется на цели <2г-_2 разработки вооружения, БЦВМ и бортовой РЛС. Все указанные подсистемы являются составными частями самолета, а соответствующие им более узкие (или более низкого уровня) цели являются средствами для достижения цели разработки самолета.
Во многих случаях полезно рассмотреть цели более высоких уровней по сравнению с заданной целью (3,-, т. е. цели заказчика, что может способствовать более успешному достижению заданной дели. Продолжая пример с самолетом-перехватчиком, мы можем рассмотреть цели разработки все более и более широких систем (см. рис. 1.1): подразделение перехватчиков с наземной РЛС и командно-вычислительным пунктом (К.ВП)— комплекс перехвата, соединение ПВО, состоящее из комплексов перехвата, радиолокационной системы и АСУ и т. д.
Обычно системы нижних уровней можно рассматривать и в ^большинстве случаев следует рассматривать как изолированные друг от друга, но подчиненные вышестоящей системе. Однако такая изоляция является лишь относительной и никогда не бывает полной. Всегда остается возможность существования некоторой важной связи между системами одного или разных уровней, которая повлияет на разработку взаимосвязанных систем.
Наличие связей между подсистемами может быть использовано для изменения промежуточных целей в интересах достижения цели разрабатываемой СТС с наибольшей эффективностью. Даже простое составление перечня взаимных связей будет очень полезным началом анализа. Ни одну промежуточную цель нельзя рассматривать как окончательную. Меняющиеся обстоятельства превращают верный в свое время выбор цели в устарелый.
Второй подход к расчленению цели синтеза СТС на иерархическую систему промежуточных целей основан на распределении разделения труда между организациями и их подразделениями (отделами, бригадами, группами). Полученное при этом дерево целей не всегда совпадает с деревом, составленным при первом подходе, из-за того, что структура исследовательских и проектных организаций может не совпадать со структурой разрабатываемой СТС. Третий подход основан на логическом анализе проблемы синтеза СТС, на выявлении последовательности решения задач и взаимосвязей между частными задачами синтеза. Этот подход проиллюстрируем деревом целей, построенным для анализа эффективности подвижной системы ПВО [51]. В данном примере формулировки целей и задач анализа совпадают. Цель-задача оценки эффективности системы путем логического анализа разделяется на промежуточные цели-задачи, рассматриваемые первоначально как независимые (рис. 2.7):
1.1 — анализ эффективности системы ПВО, находящейся на позиции (при этом система рассматривается как стационарная);
1.2 — анализ влияния подвижности повышения эффективности системы за счет способности менять свое местоположение в необходимых ситуациях, снижения эффективности системы за счет ее перемещения и установки на новом месте.
Цели-задачи 1.1 и 1.2, в свою очередь, могут быть разделены на цели-задачи:
2.1 — анализ способности системы поражать воздушные цели;
2.2 — анализ надежности работы элементов системы;
2.3 — анализ живучести системы после нападения противника.
Разделяя исходную задачу на частные задачи, нельзя упускать из вида возможные взаимосвязи между этими задачами. Например, перемещение системы ПВО
(задача 1.2) приводит к толчкам и вибрациям оборудования, что уменьшает надежность работы системы «а позиции (задача 2.2) по сравнению со стационарной системой.
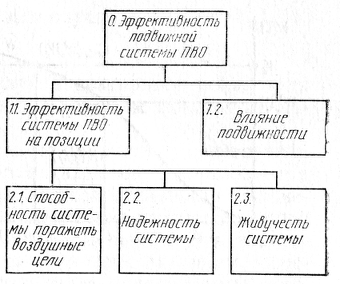
Рис. Декомпозиция задачи анализа эффективности подвижной системы ПВО — дерево целей анализа