

Автоматизация печи.
1 Этап. Изучение технологического процесса

Рис. 9.1
Поступает
сырьё
 .
В печи нагрев за счёт сгорания топлива
.
В печи нагрев за счёт сгорания топлива
 - топливо. Чтобы топливо сгорало
эффективно, подаётся воздух
- топливо. Чтобы топливо сгорало
эффективно, подаётся воздух
 .
Обязательно
>
.
.
Обязательно
>
.
2 Этап. Выбор регулируемого параметра.
Температура
сырья на выходе из печи – регулируемый
параметр,
 .
.
3 Этап. Выбор регулирующего параметра – расход топлива, .
4 Этап. Выбор возмущающих действий
Расход сырья.
5 Этап. Построение функциональной схемы автоматизации.
Необходимо соблюдать соотношение воздуха и топлива необходимо 3 системы регулирования.
1 Система: стабилизация температуры сырья на выходе из печи.
2 Система: стабилизация соотношения топливо – воздух.
3 Система: стабилизация расхода сырья, подаваемого в печь.
1-1 – измерительный преобразователь температуры (термопара)
1-2 – контроллер ( измеряет, сигнализирует по max-ому, стабилизирует t)
1-3 – преобразование Е/Р
1-4 – исполнительное устройство
2-1, 3-1 – измерительный преобразователь расхода – диафрагма.
На выходе ∆Р, МПа
2-2, 3-2 – нормирующий преобразователь – дифференциальный манометр и ДТП. На выходе – расход
2-3
– контроллер (FFC
– т.к. 2 расхода). Он стабилизирует
соотношение топлива к воздуху
 =
3/5 – соотношение устанавливает оператор.
=
3/5 – соотношение устанавливает оператор.
Если изменилась , затем и соотношение нарушено, то начинает работать вторая система.
4-1 – измерительный преобразователь – диафрагма
4-2 – нормирующий преобразователь
4-3 – контроллер (R – регистрирует и посылает в базу данных; А – сигнализация по min; С- стабилизация).
Всё это одноконтурные системы регулирования.
Изменилась изменится , 20-30 мин до изменения , большая инерционность печи. Используется ПИД закон регулирования.
Используется один контроллер, но с несколькими каналами, а не много контроллеров.
Так как печь инерционный объект, то используются каскадные системы регулирования (КСР). Её использование позволяет улучшить показатели качества регулирования (уменьшает динамическую ошибку, уменьшает время регулирования). КСР используется для инерционных объектов (в частности, для печи). КСР используется с целью: обеспечить неизменяемость регулируемого параметра как можно дольше.
Каскадные системы регулирования (КСР)
Это 2-ух или 3-ёх контурная система регулирования.
Будем рассматривать 2-ух контурную систему регулирования 2 контроллера (регулятора), т.е. 2 канала связи.
1 контроллер называется основным или корректирующим. Он устанавливается на основном регулируемом параметре. Задание данному контроллеру устанавливает оператор.
2 контроллер называется вспомогательным или стабилизирующим. Ему задание устанавливает первый контроллер, то есть выход основного контроллера служит заданием второму.
Вспомогательный контроллер устанавливается в месте, обладающим меньшей инерционностью, то есть будет быстрее реагировать на изменение воздействующего параметра.
Рассмотрим КСР печи (упрощённая схема регулирования)

Рис. 9.2
Читается следующим образом: стабилизация температуры в печи с коррекцией по температуре сырья на выходе из печи. Если температура в печи изменяется, вспомогательный контроллер увеличивает . Если температура на выходе из печи изменилась, то вступает в действие первый контроллер и корректирует задание второму контроллеру. В настоящее время используется КСР, так как уменьшается динамическая ошибка и время регулирования.
Для выдержки соотношения: основной на , 2-ой – для проверки соотношения – КСР.
Читается: стабилизация соотношения топливо – воздух с коррекцией по содержанию кислорода в печи.
2-1 – контроллер, определяющий содержание кислорода в печи – это основной контроллер. Ему задание устанавливает оператор.
2-2 – вспомогательный (стабилизирующий) контроллер. Стабилизирует соотношение топливо – воздух, изменяя расход воздуха .
2-1 корректирует задание для 2-2, если содержание кислорода в печи изменилось.
Задание:
 ,
мА
,
мА
Автоматизация гидродинамических процессов
Перемещение жидкости и газа.
Автоматизация насоса (центробежного)
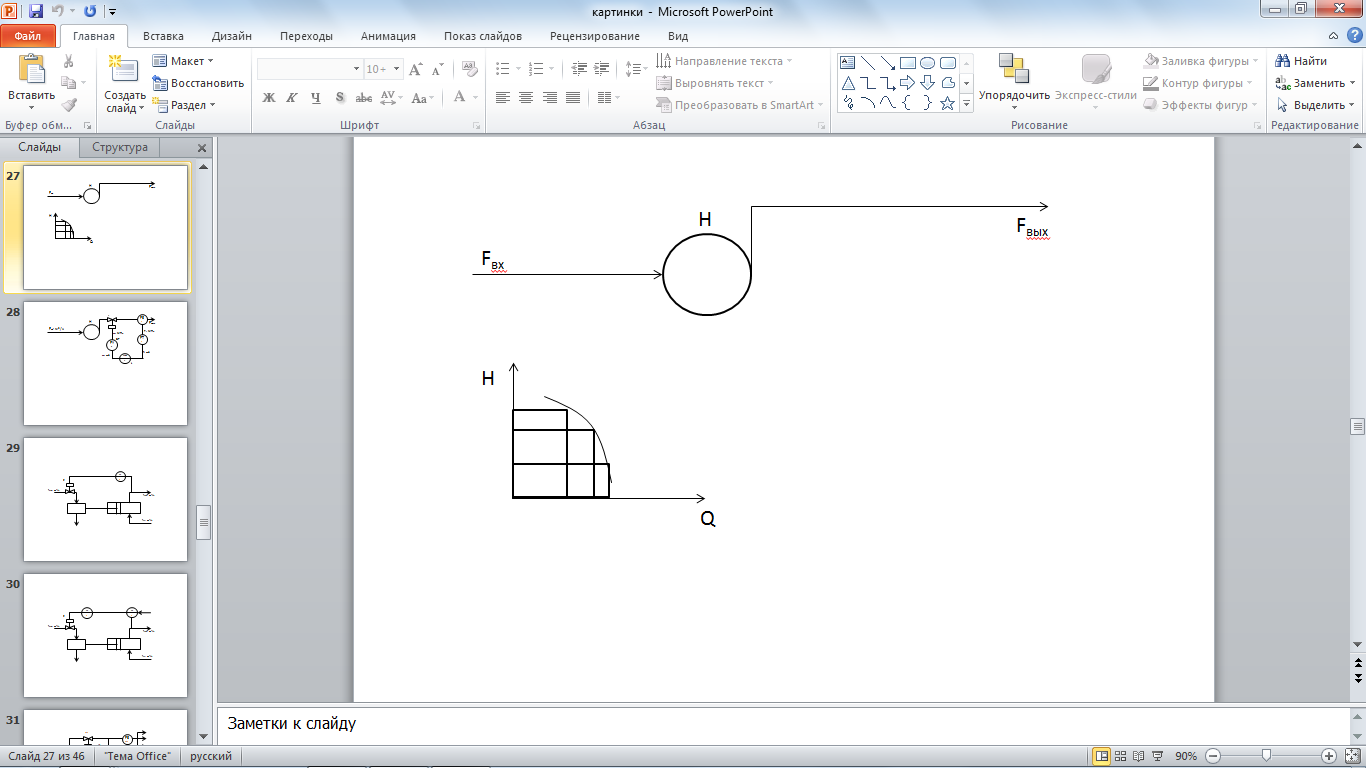
Рис. 9.3
Необходимо получить соответствующий напор в линии нагнетания:
H



Вся автоматизация только на линии нагнетания.
4 – ЭПП; 3 – контроллер; 2 – нормирующий преобразователь; 1 – измерительный преобразователь.
И регулируемый, и регулирующий параметр – расход в линии нагнетания (1-4)
Если большой расход, то 1 установить перед ИУ 5 (раньше по течению).
Поршневой насос с паровым приводом (одноконтурная система регулирования).

Рис. 9.4
Регулируемый параметр -
Регулирующий
параметр -

Здесь использовали каскадную систему.

Рис. 9.5
Стабилизация расхода пара с коррекцией по расходу в линии нагнетания
Лекция №10