

8) Проверка вывода пункта 5 с помощью частотного критерия Михайлова.
Характеристический полином системы:
A(s)=0.0735s4+0.6265s3+4.97998s2+23.05s+30;


Вещественная функция Михайлова:

Мнимая функция Михайлова:

Для построения годографа Михайлова решаем уравнения:








Таблица 5
|
0 |
2.58522 |
6.06562 |
7.81484 |
|
30 |
0 |
-53.7302 |
0 |
|
0 |
48.76468 |
0 |
-118.8749 |


Замкнутая САУ будет устойчивой тогда и только тогда, когда годограф Михайлова, при изменении от 0 до +∞, начинаясь на положительной действительной полуоси последовательно и нигде не обращаясь в 0, пересекает 4 квадрата комплексной плоскости. Приведенный на рисунке график соответствует критерию Михайлова, следовательно, замкнутая САУ устойчива.
9) Нахождение коэффициентов c0, c1, c2 ошибок системы.
Передаточная функция ошибки имеет вид:


Коэффициенты ошибок системы равны:



10) Построение с помощью эвм переходной функции замкнутой системы и оценивание основных показателей качества регулирования (перерегулирование и время регулирования) в системе.
Переходная функция замкнутой системы:


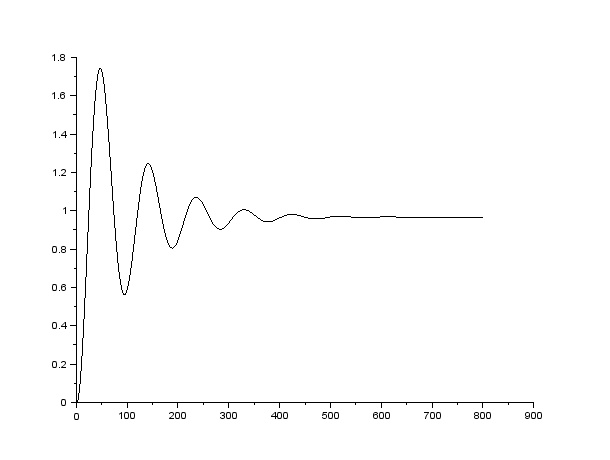
Рисунок 11 – переходная функция
Время регулирования составляет:

Перерегулирование равно:


Список использованной литературы
1. Анализ линейных систем автоматического управления: Методические указания к выполнению курсовой работы по дисциплине “Теория автоматического управления” / Уфимск. гос. авиац. техн. ун-т; Сост. Ф. М. Ахмеджанов, В. Г. Крымский. – Уфа, 2009. – 41с.
2. Теория систем автоматического управления / В. А. Бесекерский, Е. П. Попов. – Изд. 4-е, перераб. и доп. – СПб, Изд-во “Профессия”, 2003. – 752 с.
Действия, выполненные в Scilab для решения задач курсовой работы
3) s=poly(0,'s');
a=3.14998*s^2+20.8*s+29;
b=0.0735*s^4+0.6265*s^3+1.83*s^2+2.25*s+1;
w=syslin('c',a/b);
nyquist(w,0,100)
4) s=poly(0,'s');
a=3.14998*s^2+20.8*s+29;
b=0.0735*s^4+0.6265*s^3+1.83*s^2+2.25*s+1;
w=syslin('c',a/b);
bode(w,0.001,100)
6) s=poly(0,'s');
a=3.14998*s^2+20.8*s+29;
b=0.0735*s^4+0.6265*s^3+1.83*s^2+2.25*s+1;
w=syslin('c',a/b);
p_margin(w)
10) s=poly(0,'s');
a=3.77998*s^2+23.7*s+29;
b=0.0735*s^4+0.6265*s^3+4.97998*s^2+23.05*s+30;
w=syslin('c',a/b);
t=0:0.01:20;
csim('step',t,w);
plot2d(csim('step',t,w))