

Планирование в системах пакетной обработки данных |
|
Первым пришел - первым обслужен". Процессам предоставляется доступ к процессору в том порядке, в котором они его запрашивают. Преимущество: легко понять и столь же легко программировать Недостаток: если есть один процесс, ограниченный возможностями процессора, то они замедлят работу процесса Кратчайшая задача - первая". Предполагается, что временные отрезки работы известны заранее. Если в очереди есть несколько одинаково важных задач, планировщик выбирает первой самую короткую задачу. Происходит экономия времени. Эта схема работает лишь в случае лишь одновременного наличия задач Наименьшее оставшееся время выполнения Это версия предыдущего алгоритма с переключениями. В соответствии с этим алгоритмом планировщик каждый раз выбирает процесс с наименьшим оставшимся временем выполнения. В этом случае также необходимо заранее знать время выполнения задач. Когда поступает новая задача, ее полное время выполнения сравнивается с оставшимся временем выполнения текущей задачи. Если время выполнения новой задачи меньше, текущий процесс приостанавливается и управление передается новой задаче. Эта схема позволяет быстро обслуживать короткие запросы. |
|
Планирование в интерактивных системах |
|
Циклическое планирование". Каждому процессу предоставляется некоторый интервал времени процессора - квант. Если к концу кванта времени процесс все еще работает, он прерывается, а управление передается другому процессу. Первоначальный процесс переносится в конец очереди. Значение кванта около 20-50 мс является оптимальным. В этом типе алгоритма есть важное допущение о том, что все процессы равнозначны. Приоритетное планирование Основная идея: каждому процессу присваивается приоритет, и управление передается готовому к работе процессу с самым высоким приоритетом. Чтобы предотвратить бесконечную работу процессов с высоки приоритетом, планировщик может уменьшит приоритет процесса с каждым тактом часов (то есть при каждом прерывании по таймеру). Если в результате приоритет текущего процесса окажется ниже, чем приоритет следующего процесса, произойдет переключение. Возможно предоставление каждому процессу максимального отрезка времени работы. Как только время кончилось, управление передается следующему по приоритету процессу. |
|
Планирование в системах реального времени |
|
В системах реального времени существенную роль играет время. Чаще всего одно или несколько внешних физических устройств генерирует входные сигналы, и компьютер должен адекватно на них реагировать в течение заданного промежутка времени. Например, компьютер в проигрывателе компакт-дисков получает биты от дисковода и должен за очень маленький промежуток времени конвертировать их в музыку. Если процесс конвертации будет слишком долгим, звук окажется искаженным. Подобные системы также используются для наблюдения за пациентами в палатах интенсивной терапии, в качестве автопилота самолета, для управления роботами на автоматизированном производстве. В любом из этих случаев запоздалая реакция ничуть не лучше, чем отсутствие реакции. Системы реального времени делятся на жесткие системы реального времени, что означает наличие жестких сроков для каждой задачи, и гибкие системы реального времени, в которых нарушения временного графика нежелательны, но допустимы. В обоих случаях реализуется разделение программы на несколько процессов, каждый из которых предсказуем. Эти процессы чаще всего бывают короткими и завершают свою работу в течении секунды. Когда появляется внешний сигнал, именно планировщик должен обеспечить соблюдение графика Внешние события, на которые система должна реагировать можно разделить на периодические (возникающие через регулярные промежутки времени) и непериодические (возникающие непредсказуемо). Алгоритмы планирования для систем реального времени могут быть как статическими, так и динамическими. В первом случае все решения планирования принимаются заранее, еще до запуска системы. Во втором случае решения планирования принимаются по ходу дела. Статическое планирование допустимо только при наличии достоверной информации о работе, которую необходимо выполнить и о временном графике, которого нужно придерживаться. Динамическое планирование не нуждается в подобных ограничениях |
|
Планирование - обеспечение поочередного доступа процессов к одному процессору.
Планировщик - отвечающая за это часть операционной системы.
Алгоритм планирования - используемый алгоритм для планирования.
Ситуации, когда необходимо планирование:
Когда создается процесс
Когда процесс завершает работу
Когда процесс блокируется на операции ввода/вывода, семафоре, и т.д.
При прерывании ввода/вывода.
Алгоритм планирования без переключений (неприоритетный) - не требует прерывание по аппаратному таймеру, процесс останавливается только когда блокируется или завершает работу.
Алгоритм планирования с переключениями (приоритетный) - требует прерывание по аппаратному таймеру, процесс работает только отведенный период времени, после этого он приостанавливается по таймеру, чтобы передать управление планировщику.
Планирование в системах пакетной обработки
"Первый пришел - первым обслужен" (FIFO - First In Fist Out)
Процессы ставятся в очередь по мере поступления.
Преимущества:
Простата
Справедливость (как в очереди покупателей, кто последний пришел, тот оказался в конце очереди)
Недостатки:
Процесс, ограниченный возможностями процессора может затормозить более быстрые процессы, ограниченные устройствами ввода/вывода.
"Кратчайшая задача - первая"

Нижняя очередь выстроена с учетом этого алгоритма
Преимущества:
Уменьшение оборотного времени
Справедливость (как в очереди покупателей, кто без сдачи проходит в перед)
Недостатки:
Длинный процесс занявший процессор, не пустит более новые краткие процессы, которые пришли позже.
Наименьшее оставшееся время выполнение
Аналог предыдущего, но если приходит новый процесс, его полное время выполнения сравнивается с оставшимся временем выполнения текущего процесса.
Трехуровневое планирование
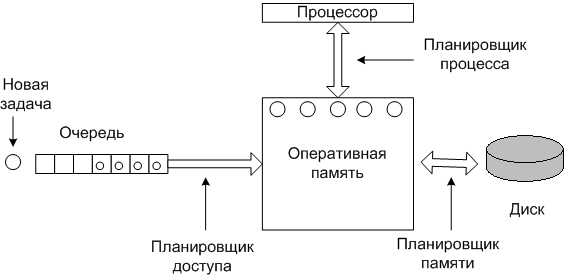
Трехуровневое планирование
Планировщик доступа выбирает задачи оптимальным образом (например: процессы, ограниченные процессором и вводом/выводом).
Если процессов в памяти слишком много, планировщик памяти выгружает и загружает некоторые процессы на диск. Количество процессов находящихся в памяти, называется степенью многозадачности.
Планирование в интерактивных системах Циклическое планирование
Самый простой алгоритм планирования и часто используемый.
Каждому процессу предоставляется квант времени процессора. Когда квант заканчивается процесс переводится планировщиком в конец очереди. При блокировке процессор выпадает из очереди.

Пример циклического планирования
Преимущества:
Простата
Справедливость (как в очереди покупателей, каждому только по килограмму)
Недостатки:
Если частые переключения (квант - 4мс, а время переключения равно 1мс), то происходит уменьшение производительности.
Если редкие переключения (квант - 100мс, а время переключения равно 1мс), то происходит увеличение времени ответа на запрос.
Приоритетное планирование
Каждому процессу присваивается приоритет, и управление передается процессу с самым высоким приоритетом.
Приоритет может быть динамический и статический.
Динамический приоритет может устанавливаться так:
П=1/Т, где Т- часть использованного в последний раз кванта
Если использовано 1/50 кванта, то приоритет 50.
Если использован весь квант, то приоритет 1.
Т.е. процессы, ограниченные вводом/вывода, будут иметь приоритет над процессами ограниченными процессором.
Часто процессы объединяют по приоритетам в группы, и используют приоритетное планирование среди групп, но внутри группы используют циклическое планирование.

Приоритетное планирование 4-х групп
Методы разделения процессов на группы
Группы с разным квантом времени
Сначала процесс попадает в группу с наибольшим приоритетом и наименьшим квантом времени, если он использует весь квант, то попадает во вторую группу и т.д. Самые длинные процессы оказываются в группе наименьшего приоритета и наибольшего кванта времени.
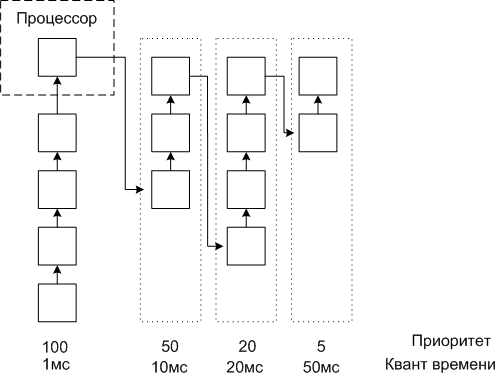
Процесс либо заканчивает работу, либо переходит в другую группу
Этот метод напоминает алгоритм - "Кратчайшая задача - первая".
Группы с разным назначением процессов
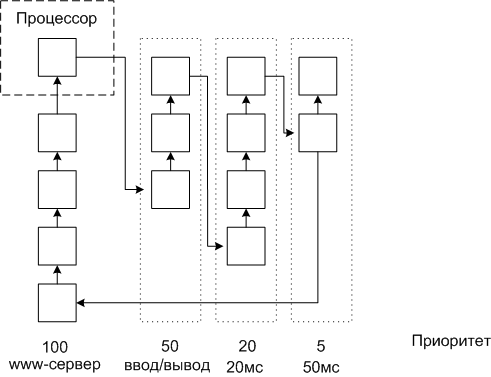
Процесс, отвечающий на запрос, переходит в группу с наивысшим приоритетом.
Такой механизм позволяет повысить приоритет работы с клиентом.
Гарантированное планирование
В системе с n-процессами, каждому процессу будет предоставлено 1/n времени процессора.
Лотерейное планирование
Процессам раздаются "лотерейные билеты" на доступ к ресурсам. Планировщик может выбрать любой билет, случайным образом. Чем больше билетов у процесса, тем больше у него шансов захватить ресурс.
Справедливое планирование
Процессорное время распределяется среди пользователей, а не процессов. Это справедливо если у одного пользователя несколько процессов, а у другого один.
Планирование в системах реального времени
Системы реального времени делятся на:
жесткие (жесткие сроки для каждой задачи) - управление движением
гибкие (нарушение временного графика не желательны, но допустимы) - управление видео и аудио
Внешние события, на которые система должна реагировать, делятся:
периодические - потоковое видео и аудио
непериодические (непредсказуемые) - сигнал о пожаре
Что бы систему реального времени можно было планировать, нужно чтобы выполнялось условие:

m - число периодических событий
i - номер события
P(i) - период поступления события
T(i) - время, которое уходит на обработку события
Т.е. перегруженная система реального времени является не планируемой.