

3.13.4. Шпиндельные узлы
К шпиндельным узлам относятся шпиндельные коробки, сверлильные, расточные, фрезерные и револьверные бабки.
Шпиндельные коробки предназначены для размещения рабочих шпинделей и передачи движения от выходного вала силовой головки к шпинделям. Шпиндельные коробки используются для выполнения сверлильно-расточных операций. Имеются также модификации для нарезания резьбы в отверстиях.
Сверлильные, расточные, фрезерные бабки предназначены для обработки одним шпинделем. Револьверная бабка дает возможность вести обработку тремя инструментами, например сверлом,зенкером, разверткой. Для сообщения инструменту движения подачи бабки устанавливают на силовых столах. Корпусы бабки имеют фланцы для установки привода вращения шпинделя.
3.14. Станки для электрофизической и электрохимической обработки
Открытие в 1943 г. электроэрозионного явления положило начало использованию физических явлений для обработки материалов плохо поддающихся традиционной обработке резанием. На технологическом оборудовании, использующем физические явления, выполняют сквозные отверстия с цилиндрическими стенками и произвольным контуром, узкие прямолинейные и криволинейные щели в деталях типа матриц, сложных штампов, пресс-форм, фасонного режущего инструмента, шаблонов, фильер и других деталей, имеющих, в том числе, малые размеры отверстий (до 0,05 мм).
Физическое явление при обработке материалов выполняет функцию режущего инструмента. Понятие о характеристическом образе (вспомогательном элементе) инструмента, сформулированное в разделе 2, полностью относится также и к используемым при обработке материалов физическим явлениям.
При обработке труднообрабатываемых материалов используются также комбинированные способы обработки, например, обработка резанием с наложением электростатического или электромагнитного поля и т.п.
3.14.1. Электроэрозионные станки
Электроэрозионная обработка, основана на физическом явлении, заключающемся в направленном разрушении материала обрабатываемой детали под воздействием электрических разрядов. Сущность направленного разрушения состоит в следующем. При электрическом разряде сфокусированный поток электронов, двигаясь с большой скоростью от одного электрода к другому, создает на поверхности электродов ударные волны сжатия. Возникшее в металле механическое напряжение распространяется по всем направлениям, в том числе, и откуда пришла ударная волна. Достигнув первоначальной поверхности, она отражается от нее и меняет знак на обратный, вследствие чего на поверхности возникают растягивающие напряжения. В результате этого происходит выброс частиц металла в направлении, встречном ударной волне сжатия. Электрод постепенно погружается в заготовку, копируя в ней свою форму.
В зависимости от вида применяемых разрядов эрозионная обработка делится на три вида, получивших широкое распространение: электроискровая, электроимпульсная и комбинированная с использованием электроэрозионного явления.
Электроискровая обработка осуществляется при использовании искровых разрядов малой длительности (порядка нескольких сотых секунду), которые следуют с большой скважностью. Обрабатываемая деталь 1 (рис. 3.123) погружена в жидкую среду 2 (керосин, трансформаторное масло, смесь керосина и индустриального масла и т.п.). Инструмент 3 (медь М1, М2, медный сплав МЦ-1, алюминий и его сплавы) перемещается поступательно-возвратно. Электрический ток от специального генератора Г подводится к детали-аноду и инструменту-катоду. Необходимый искровой зазор между деталью и инструментом поддерживается автоматическим регулятором АР. Форма разрушения детали зависит от формы торцовой части инструмента.
Э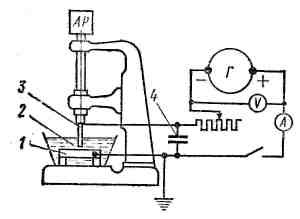 лектроискровая
обработ- ка характеризуется
широким диапозоном режимов обработ ки
– от черновой производи- тельностью
1,5 – 10 мм3/с
при Rz
= 160 – 40 мкм
до отделоч- ной производительностью
око- ло 0,001 мм3/с
при Ra
= 1,25 – 0,16 мкм.
Особенность этого процесса - сравнительно
низ- кая производительность, большой
износ электродов, об- Рис.
3.123. Схема станка для электроис-
разование на обрабатываемой
кровой обработки
поверхности тонкого
дефект- ного слоя толщиной 0,2 –0,5мм
на черновых и 0,02 – 0,05 мм
на чистовых режимах.
лектроискровая
обработ- ка характеризуется
широким диапозоном режимов обработ ки
– от черновой производи- тельностью
1,5 – 10 мм3/с
при Rz
= 160 – 40 мкм
до отделоч- ной производительностью
око- ло 0,001 мм3/с
при Ra
= 1,25 – 0,16 мкм.
Особенность этого процесса - сравнительно
низ- кая производительность, большой
износ электродов, об- Рис.
3.123. Схема станка для электроис-
разование на обрабатываемой
кровой обработки
поверхности тонкого
дефект- ного слоя толщиной 0,2 –0,5мм
на черновых и 0,02 – 0,05 мм
на чистовых режимах.
Область использования – обработка заготовок небольших размеров, изготовление твердосплавных матриц, отверстий малого диаметра.
Электроимпульсная обработка отличается от электроискровой тем, что обрабатываемая деталь является катодом, а инструмент – анодом. Импульсные разряды создают машинными и полупроводниковыми генераторами. Процесс осуществляется, как правило, на низких и средних частота (400 – 300 Гц) с низким напряжением (25 - 30 В) и большой силе тока (50 – 500 А). Длительность импульсов 0,5 – 1, мкс. Особенность процесса обработки - относительно небольшой износ электродов (например, для графита 0,1 – 0,5 %) и относительно высокая производительность, например, на черновых режимах 100 – 300 мм3/с при Rz = 80 – 40 мкм.
Электроимпульсная обработка используется при обработке средних и крупных штампов, пресс-форм лопаток турбин, решеток и т.п. деталей из закаленных и труднообрабатываемых деталей.
Станки для электроискровой и электроимпульсной обработки образуют размерный ряд, в котором в качестве основного параметра принят размер стола. К этому ряду относятся электроэрозионные копировально-прошивочные координатные станки высокой точности, например, моделей 4Д722А, 4Е723А, 4726 и группа станков с ЧПУ для профильной вырезки перематывающейся латунной проволокой, например, станок модели 4532Ф3.
 Электроэрозионный
вырезной станок с ЧПУ модели 4532Ф3.
Предназначен
для изготовления вырубных штампов
холодной штамповки, фасонных фильер в
матрицах, шаблонов и подобных деталей
из токопроводящих материалов: легированных
закаленных сталей, металлокерамических
твердых сплавов и т.д. В качестве источника
технологического тока в станке применен
тиристорный генератор коротких импульсов.
Электроэрозионный
вырезной станок с ЧПУ модели 4532Ф3.
Предназначен
для изготовления вырубных штампов
холодной штамповки, фасонных фильер в
матрицах, шаблонов и подобных деталей
из токопроводящих материалов: легированных
закаленных сталей, металлокерамических
твердых сплавов и т.д. В качестве источника
технологического тока в станке применен
тиристорный генератор коротких импульсов.
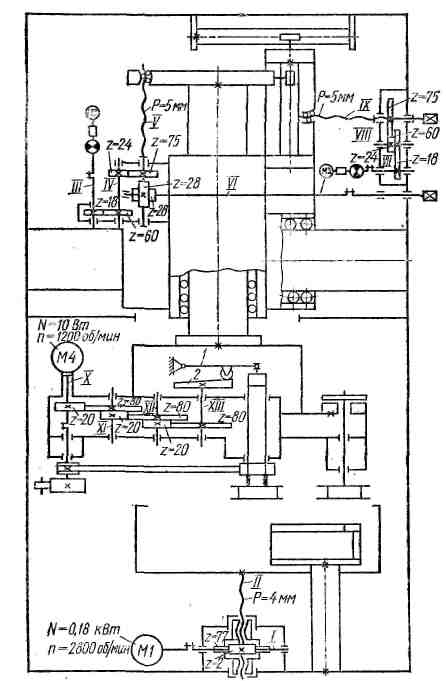
3.124. Электроэрозионный вырезной станок модели 4532Ф3
Техническая характеристика. Наибольшие размеры обрабатываемой заготовки 250 × 160 × 75 мм; наибольшая масса 45 кг. Точность изготовления контура 0,032 мм. Наибольшая производительность при обработке: стали 35 мм3/мин, твердого сплава 18 мм3/мин.
Станок оснащен устройством ЧПУ типа «Контур» с линейным интерполятором. Может быть также оснащен мини-ЭВМ, где программа вводится посредством перфоленты или клавиатуры.
Класс воспроизведения вырезаемой поверхности копирование + след. Поэтому кинематическая структура станка содержит одну формообразующую группу Фv(П1П2) и три вспомогательные группы Вс(В3), Вс(П4), Вс(П5).
Группа Фs(П1П2) воспроизводит направляющую - профиль обрабатываемой поверхности посредством перемещения скобы с проволокой в горизонтальной плоскости в двух взаимно перпендикулярных направлениях (прямоугольная система координат). Конструктивно эта группа смонтирована в отдельном корпусе, перемещающемся по направляющим качения, выполненным в виде линейных подшипников (танкеток). Особенность группы – применение двух шаговых электродвигателей и синхронной электронной связи между ними, осуществляющей согласование продольной и поперечной кареток, несущих скобу (аналог инструментального суппорта).
Внутренняя связь:
продольная каретка (П1) → 1/tТВ=5 → 75/24 → 60/18 → М2 → М3 →
→ 18/60 → 24/75 → tТВ=5 → поперечная каретка (П2).
Группа включает две одинаковых внешних связи, обеспечивающие внутреннюю связь энергией движения.
Первая внешняя связь:
М2 → 18/60 → 24/75 → tТВ=5 → продольная каретка (П1).
Вторая внешняя связь:
М3 → 18/60 → 24/75 → tТВ=5 → продольная каретка (П2).
Звено соединения связей – «электрический вал», или система синхронизации, функцию которой выполняет линейный интерполятор системы ЧПУ, связывающая оба шаговые электродвигателя.
Группа настраивается на траекторию и скорость – системой ЧПУ.
При линейном перемещении скобы по одной из двух координат в любую сторону за один импульс от пульта ЧПУ (при минимальном повороте вала шагового двигателя на 1,5о) составит
![]()
Ручное установочное перемещение скобы осуществляется в продольном направлении непосредственно от ТВ, в поперечном направлении через винтовую зубчатую передачу 28/28 и ТВ.
Скоба служит для установки и крепления всех устройств и механизмов, обеспечивающих перемотку и натяжение электрода-проволоки. Для устранения влияния износа проволоки на обработку ее перематывают с небольшой скоростью.
Перемотка проволоки осуществляется группой Вс(В3). Ее внутренняя связь:
подшипниковые опоры скобы → гильза шпинделя приемной катушки (В3).
Внешняя связь:
М4 → ременная передача → гильза шпинделя приемной катушки (В3).
Скорость перемотки регулируется в пределах 8 – 20 мм/с посредством изменения частоты вращения ротора частотно регулируемого реактивного электродвигателя М4 типа РД – 09.
Перемотка проволоки сопровождается ее укладкой на приемной катушке. Это движение осуществляется группой Вс(П4), имеющей общий электродвигатель с группой Вс(В3).
Внутренняя связь группы укладки проволоки:
гильза → шпинделя приемной катушки (П4).
Внешняя связь:
М4 → 20/80 → 20/80 →20/80 → вал XIII → кулачок 2 →
→ качающийся рычаг 1 → шпинделя приемной катушки (П4).
Скорость раскладки ненастраивается, а изменяется одновременно с изменением скорости перемотки проволоки.
В нижней части станины расположена подъемная ванна для рабочей жидкости. В ванне расположен Г-образный стол для закрепления обрабатываемой заготовки. Подъем и опускание ванны осуществляется посредством ненастраиваемой группы Вс(П5). Ее внешняя связь:
М1 → 2/77 → ТВ → ванна (П5).
Скорость перемещения ванны
![]()