

33. Условия включения синхронных генераторов на параллельную работу
Большинство генераторов современных электростанций оборудованы несколькими генераторами работающих на общую сеть. Такую работу называют параллельной. Если станция оборудована одним генератором, то его нагрузка будет сильно колебаться в зависимости от времени года и суток. Замена одного генератора несколькими дает возможность при необходимости часть генераторов оставить. При этом экономится топливо, вода и т.д. также на станцию предусматривается резервный генератор. Для включения генератора на параллельную работу необходимо выполнить следующие условия:
Равенство действующих значений напряжения в сети и на зажимах генератора вкл. В сеть. Этого добиваются регулируя ток возбуждения.
Равенство частот в генераторе и в сети. Этого добиваются регулируя скорость вращения.
Должно соблюдаться последовательное чередование фаз. Это проверяется с помощью специального прибора с помощью фазауказателя.
Напряжение в сети и генераторе в момент включения должны совпадать по фазе.
34. Угловая характеристика синхронной машины
Зависимость электромагнитного момента Мэм от угла рассогласования Θ (угла сдвига фаз между вектором ЭДС фазы якоря E0 и вектором напряжения сети Uф), т.е. Мэм(Θ), называют угловой характеристикой синхронного двигателя (рис. 10.15).
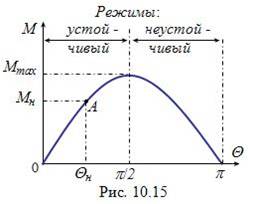
Угловая характеристика позволяет анализировать процессы, происходящие в синхронном двигателе, при изменении нагрузки (изменении момента сопротивления Мc на валу) при постоянном токе возбуждения (Iв = const).
Устойчивая работа
двигателя соответствует участку угловой
характеристики от угла
 = 0 до угла
= π/2.
Точка A
соответствует номинальному режиму
работы.
= 0 до угла
= π/2.
Точка A
соответствует номинальному режиму
работы.
При номинальном
режиме угол
н
 20…35°, что соответствует двукратному
или несколько большему запасу по мощности
или моменту λ = Мmax/Мн = 1/ sin
» 2…2,5.
20…35°, что соответствует двукратному
или несколько большему запасу по мощности
или моменту λ = Мmax/Мн = 1/ sin
» 2…2,5.
35. Конструкция и принцип действия двигателя постоянного тока независимого возбуждения
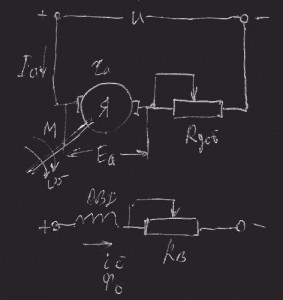
ДПТ состоит из трех основных частей: статора с обмоткой возбуждения, ротора с якорной обмоткой и щеточно-коллекторного узла, необходимого для подведения напряжения к обмотке якоря (далее ОЯ). При этом щетки неподвижны, а коллектор жестко связан с якорем.
В ДПТ для улучшения условий коммутации могут быть также предусмотрены и дополнительные полюса, а для компенсации поперечной реакции якоря и компенсационные обмотки на полюсах статора.
В зависимости от способа электромагнитного возбуждения ДПТ подразделяют на ДПТ с НВ, ПВ, смешанным возбуждением и параллельным возбуждением.
Двигатели независимого возбуждения могут быть разделены на двигатели с электромагнитным возбуждением, когда обмотка возбуждения подключена к постороннему источнику постоянного тока или на зажимы двигателя, и на двигатели с магнитоэлектрическим возбуждением, когда вместо обмотки возбуждения используются постоянные магниты.
Необходимым условием процесса преобразования энергии является протекание переменных токов хотя бы по части обмоток машины. В двигателе постоянного тока это условие выполняется работой коллектора, коммутирующего постоянный ток, поступающий от источника питания, с частотой ωэл, равный угловой скорости вращения ротора.
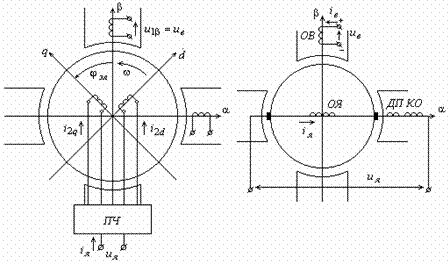
a) б)
Рис.6.1. Двухфазная модель двигателя постоянного тока c независимым возбуждением
Обмотка статора по оси β включена на постоянное напряжение Uв. Обмотки ротора 2 d и 2q получают питание от преобразователя частоты ПЧ, осуществляющего коммутацию токов i2d и i2q в функции угла поворота φэл с частотой ωэл. Если коммутация осуществляется механическим коммутатором-коллектором, то мы имеем обобщенную электрическую модель двигателя постоянного тока. В случае применения в качестве ПЧ вентильного преобразователя частоты, мы имеем модель вентильного двигателя.
МДС статора неподвижна в пространстве; она создается током возбуждения iв= i1β, а ее направление соответствует направлению оси β. Соответственно и МДС ротора при его вращении со скоростью ω должна быть неподвижна относительно статора, что возможно лишь при условии вращения МДС ротора против его вращения со скоростью ω. Это условие выполняется, если обмотки ротора обтекаются токами, изменяющимися по законам:
![]() ;
;
![]() (6.1)
(6.1)
МДС ротора в этом случае неподвижна относительно статора, поэтому для математического описания динамических процессов преобразования энергии в двигателе постоянного тока целесообразно использовать формулы прямого преобразования координат обобщенной машины: α, β, d, q -› α, β (ωк=0). Для роторных переменных они имеют вид:
![]()
 (6.2)
(6.2)
Подставив u=α,
v=β,
![]() ,
получим:
,
получим:
![]() (6.3)
(6.3)
![]() (6.4)
(6.4)
Следовательно, в осях α, β действительным переменным токам обмотки ротора эквивалентна одна якорная обмотка, ось которой совпадает с осью α и которая обтекается постоянным током iя. В реальной машине по оси α расположены также обмотка дополнительных полюсов и компенсационная обмотка. Поэтому модель двигателя постоянного тока в осях α, β будет иметь вид (рис. 6.1б).