

5.4.3. Создание зеркальной копии объекта
Создание зеркальной копии объекта осуществляется относительно плоскости симметрии, лежащей перпендикулярно видовой плоскости. Видовая плоскость задается своим следом на одном из видов (стандартном или произвольном). При работе с произвольным видом видовая плоскость совпадает с плоскостью экрана, тогда прямая, относительно которой можно получить зеркальную копию трехмерного объекта, будет определять след плоскости симметрии, перпендикулярной такой видовой плоскости.
Рассмотрим процесс создания зеркальной копии объекта на конкретном примере. Пусть требуется построить зеркальную копию пирамиды (см. рис. 5.7) относительно некоторой плоскости. След этой плоскости будем за-
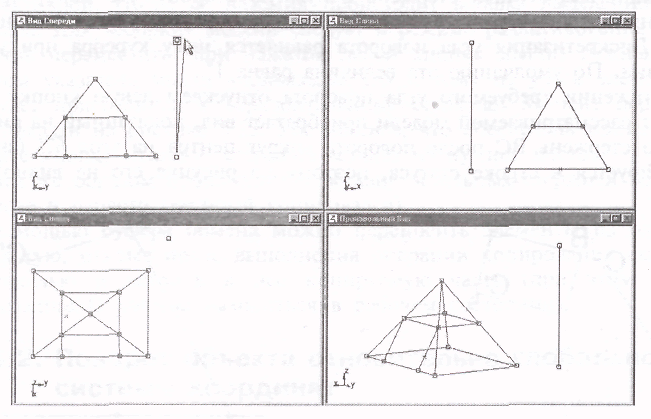
Рис. 5.16. Процесс создания зеркальной копии объекта
давать в окне «Вид Спереди», но для того чтобы ее положение можно было видеть на других видах, для удобства предварительно создадим вспомогательный стержень, к которому и будет в дальнейшем «привязан» след плоскости симметрии.
Замечание. Привязывать след плоскости симметрии к стержням или узлам совершенно не обязательно. Точки, определяющие положение следа плоскости симметрии в окне рассматриваемого вида, могут быть поставлены в произвольное место.
Далее выделяем
объекты, для которых создается зеркальная
копия, и нажимаем кнопку «Симметрия»
![]() на
панели инструментов «Инструменты»
(меню «Инструменты»/«3еркало»).
на
панели инструментов «Инструменты»
(меню «Инструменты»/«3еркало»).
После этого переходим к изображению следа плоскости симметрии на одном из видов. В рассматриваемом примере след плоскости совпадает со вспомогательным стержнем в окне «Вид спереди». Следовательно, необходимо щелкнуть левой кнопкой мыши вначале на нижнем узле этого стержня, а затем на верхнем. Момент, когда привязка «захватила» только верхний узел стержня, показан на рис. 5.16.
Результат выполнения операции зеркального копирования продемонстрирован на рис. 5.17. На этом рисунке исходная конструкция выделена, а невыделенная получена в результате зеркального отображения. Стержень определяет положение следа плоскости симметрии в окне «Вид Спереди». Положение плоскости симметрии на других видах можно оценить из сопоставления рис. 5.17 и 5.16 (окна видов на этих рисунках одинаковы).
Если бы в качестве следа плоскости симметрии был выбран этот же стержень, но на другом стандартном виде, например, в окне «Вид Слева»,
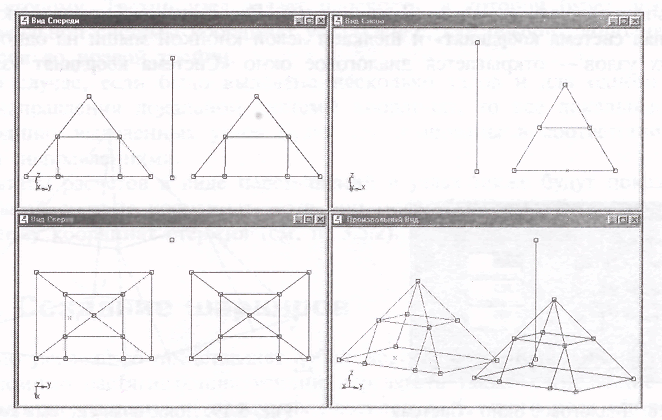
Рис. 5.17. Результат операции создания зеркальной копии объекта
результат операции был бы иным. Сложнее всего производить анализ результатов операции зеркального отображения в том случае, когда стержень находится в окне «Произвольный Вид».
5.5. Задание локальной системы координат в узлах
Опоры, шарниры и перемещения опор по умолчанию задаются в глобальной системе координат. Но на практике опоры часто имеют разрешенные перемещения и повороты в направлениях, отличных от направлений осей глобальной системы координат. В этом случае опоры и нагрузки, возникающие вследствие смешения узлов (опор), удобно задавать не в глобальной, а в локальной системе координат, которую предварительно нужно построить в соответствующих узлах.
Локальная система координат задается путем поворота осей глобальной системы на определенные углы. Любое положение осей локальной системы координат относительно осей глобальной может быть определено тремя последовательными поворотами:
• Поворот вокруг оси Z имеющейся глобальной системы координат. При этом оси X и Y поворачиваются и переходят в оси X' и Y' соответственно.
• Второй поворот вокруг оси Y'. В этом случае ось X' занимает новое положение и становится осью X".
• Третий, заключительный, поворот системы координат вокруг оси X". Повороты вокруг соответствующих осей могут быть как положительными (против часовой стрелки), так и отрицательными (по часовой стрелке).
Если локальная система создается одновременно в нескольких узлах, то предварительно их следует выделить. Далее в меню «Рисование» выбираем пункт «Узел»/ «Локальная система координат» и щелкаем левой кнопкой мыши на одном из выделенных узлов — открывается диалоговое окно
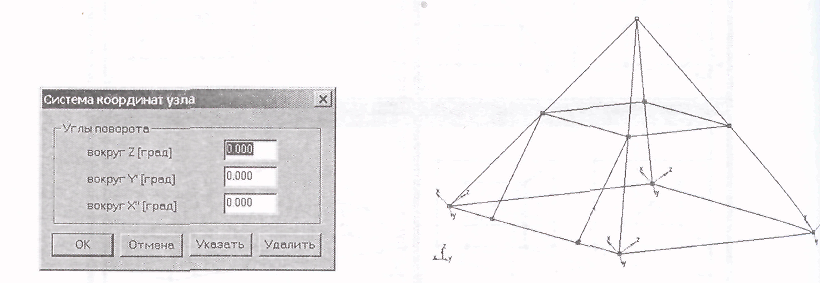
Рис. 5.18. Диалоговое окно «Система Рис. 5.19. Локальная сис
координат узла» тема координат узлов
«Система координат узла» (рис.5.18). В полях ввода этого диалога записываем значения углов поворота локальной системы координат относительно глобальной и нажимаем кнопку «ОК», после чего в узле (узлах) будет показываться его (их) локальная система координат.
На рис. 5.19 показаны узлы в основании рассмотренной нами ранее пирамиды (см. п. 5.1.4), в которых задана локальная система координат. Она была получена из глобальной системы координат следующими поворотами: вокруг оси Y' на 45° и вокруг оси X" на 30°. Поворот вокруг оси Z не производился.
На инструментальной
панели «Фильтры вида» есть специальная
кнопка «Система координат узлов»
![]() .
По умолчанию она включена. Если ее
выключить, то это действие будет
распространено только на активное окно,
для всех остальных окон кнопка будет
считаться включенной, и в них будет
показываться локальная система координат
тех узлов, для которых эта система
задана.
.
По умолчанию она включена. Если ее
выключить, то это действие будет
распространено только на активное окно,
для всех остальных окон кнопка будет
считаться включенной, и в них будет
показываться локальная система координат
тех узлов, для которых эта система
задана.
Если для каких-либо узлов модели конструкции задана локальная система координат, то опоры, а также нагрузки, вызванные перемещением узлов, и т. п. будут относиться именно к этой системе. В то же время нагрузки в виде приложенных к узлу силы или момента по-прежнему «привязаны» к направлениям глобальной системы координат.
У пользователя есть возможность задать расположение осей X и Y локальной системы координат узла определенным образом. Для этого используется специальная кнопка «Указать» в диалоговом окне «Система координат узла» (см. рис. 5.18). Нажав па эту кнопку, нужно указать два узла таким образом. чтобы узел, в котором создается локальная система координат (первый узел), и два новых узла (второй и третий узлы) не лежали на одной прямой. Указание узлов производится щелчком левой кнопки мыши. Ось X создаваемой локальной системы координат будет ориентирована в направлении от первого узла ко второму. Третий узел задает плоскость, в которой будет лежать орт оси Y локальной системы координат узла. Ось Z, как обычно, дополняет выбранные оси до правой тройки.
В том случае, если было выделено несколько узлов и для одного из них заданы направления локальной системы координат, то вес локальные системы координат выделенных узлов будут ориентированы в соответствии с заданными направлениями.
Результаты расчетов в виде перемещений в узлах также будут показываться в глобальной системе координат, хотя они могут быть пересчитаны в локальную систему координат стержня (см. п. 3.5.2).